") 基于GPS授時(shí)技術(shù)與無(wú)線控制的多功能智能打鈴儀設(shè)計(jì)
基于GPS授時(shí)技術(shù)與無(wú)線控制的多功能智能打鈴儀設(shè)計(jì)
前言
針對(duì)傳統(tǒng)電鈴控制器存在施工麻煩(拉專(zhuān)線)、控制不靈活、定時(shí)不準(zhǔn)、校時(shí)繁瑣、功能簡(jiǎn)單的缺點(diǎn),本作品具有以下幾個(gè)方面的特色及創(chuàng)新:
一是采用GPS 授時(shí)技術(shù),控制時(shí)間精準(zhǔn),更為重要的是主機(jī)不需要調(diào)試,一勞永逸;二是考慮極端情況發(fā)送,設(shè)置了備用時(shí)間,內(nèi)置DS1302 時(shí)鐘芯片,每間隔一定時(shí)間對(duì)DS1302 進(jìn)行GPS 授時(shí),在GPS 授時(shí)不成功的前提下可以使用上一次保存在DS1302 中的時(shí)間,并給出提示,提醒操作人員檢查GPS 設(shè)備;三是GPS 與主控制器之間采用無(wú)線通信方式,且采用的是433M 的ISM 頻道,具有較強(qiáng)的穿墻能力,徹底消除GPS 信號(hào)盲區(qū) ;四是打鈴儀采用分布式安置方法,采用自定義協(xié)議與主機(jī)進(jìn)行通信;五是分布在教學(xué)樓、實(shí)驗(yàn)樓、圖書(shū)館的打鈴儀根據(jù)使用場(chǎng)合不同,可以自動(dòng)調(diào)整鈴聲(比如圖書(shū)館需要安靜式鈴聲);六是可以點(diǎn)對(duì)點(diǎn)控制,實(shí)時(shí)控制各不同樓宇的打鈴儀是關(guān)閉或是開(kāi)啟;七是分布在不同樓宇的打鈴儀可以作為盜險(xiǎn)報(bào)警中繼路由器,檢測(cè)到危急情況時(shí)可以實(shí)時(shí)通知主機(jī),并給出報(bào)警鈴聲;八是主機(jī)每日巡檢子機(jī)工作狀態(tài),以確定其是否能正常工作。
1 系統(tǒng)設(shè)計(jì)方案
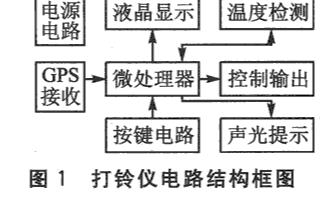
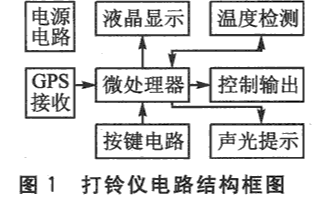
該系統(tǒng)實(shí)現(xiàn)如圖1 所示,由GPS 主機(jī)接收模塊(時(shí)基信號(hào)源)、主機(jī)控制器和下位機(jī)打鈴儀(子機(jī))三個(gè)部分組成。
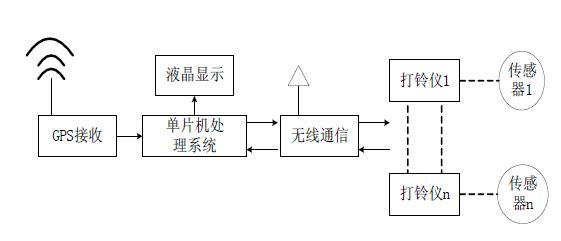
時(shí)基信號(hào)模塊將內(nèi)置CPU,控制GPS DEMO 電路獲取GPS 衛(wèi)星中的原子時(shí)鐘信號(hào),將提取出的世界時(shí)間轉(zhuǎn)換成東8 區(qū)的標(biāo)準(zhǔn)北京時(shí)間,并計(jì)算出年、月、日、星期等日歷信號(hào),并將這些信息顯示在1602 的液晶顯示器上,這些日歷時(shí)間信息通過(guò)CC1101無(wú)線模塊發(fā)送給主機(jī)控制器。時(shí)基信號(hào)模塊至于無(wú)障礙遮擋的屋外,為了方便施工,采用光太陽(yáng)+ 蓄電池方式作為供電系統(tǒng),為整個(gè)系統(tǒng)提供5V、3.3V 電源。
主控制器在整個(gè)系統(tǒng)中扮演重要角色,是整個(gè)系統(tǒng)的控制、指揮中心,一方面,它要通過(guò)無(wú)線方式從時(shí)基信號(hào)源接收時(shí)基信號(hào),另一方面又要通過(guò)無(wú)線通信方式向所有子機(jī)發(fā)送(接收)控制(數(shù)據(jù))信息。主控制與實(shí)際信號(hào)源、主機(jī)與子機(jī)之間采用ISM 頻道的433M 無(wú)線通信方案,具有開(kāi)路傳輸距離遠(yuǎn)、穿墻能力強(qiáng)的特點(diǎn)。主機(jī)與時(shí)基信號(hào)源以及主機(jī)與子機(jī)之間的通信采用不同的通信信道實(shí)現(xiàn),以避免頻道的沖突。
主機(jī)還在每天固定時(shí)間對(duì)每臺(tái)子機(jī)例行檢查,在一個(gè)公共頻道上依次“傳喚”每臺(tái)子機(jī),“命令”每臺(tái)子機(jī)將自己工作狀況發(fā)送給主機(jī)。如果主機(jī)長(zhǎng)時(shí)間接收不到自己應(yīng)答或接收到錯(cuò)誤數(shù)據(jù),則提示對(duì)應(yīng)子機(jī)發(fā)生故障,并給出提示,以便維護(hù)人員檢查維修。
子機(jī)電鈴控制模塊可以有多部(最多256 部),分布在不同的位置。由于采用了無(wú)線通信的方式,所以其安裝施工變得簡(jiǎn)單方便。主機(jī)不斷檢查日作息時(shí)間表,“到點(diǎn)”通過(guò)廣播信道給所有子機(jī)發(fā)出“打鈴”命令,子機(jī)收到該信號(hào)后控制電鈴動(dòng)作。此外,還可以發(fā)送“屏蔽”指令,讓某些特殊位置或在特殊時(shí)期的電鈴“禁響”,即其他電鈴均響,被“禁響”的電鈴不響。
子機(jī)電鈴還可以充當(dāng)“防盜中繼路由”的角色。通過(guò)無(wú)線通信方式檢測(cè)置于不同位置的傳感器信息,實(shí)時(shí)檢測(cè)盜險(xiǎn)情況,一旦發(fā)送危急情況,立馬發(fā)出告警鈴聲,并把該信息反饋給主機(jī)控制器。
2 打鈴儀實(shí)現(xiàn)
設(shè)計(jì)的主要核心部分是軟件構(gòu)架及其設(shè)計(jì),本設(shè)計(jì)的程序由時(shí)基信號(hào)源、主機(jī)控制器、子機(jī)模塊三部分組成,部分模塊電路如圖2 所示。

2.1 時(shí)基信號(hào)源模塊
首先,利用現(xiàn)有的GPS 模塊,接收美國(guó)衛(wèi)星數(shù)據(jù),通過(guò)異步串口通信與主機(jī)1 進(jìn)行聯(lián)接,波特率為9600bps.主機(jī)1 在串行中斷中先把接收到的數(shù)據(jù)裝載在一個(gè)數(shù)組里。主機(jī)1 與通過(guò)NMEA-0183 協(xié)議對(duì)轉(zhuǎn)載的數(shù)組進(jìn)行判斷與辨別。
先辯斷接收辨識(shí)位“$”.由于本項(xiàng)目只需GPS 的時(shí)間數(shù)據(jù)。所以只接收GPRMG,其內(nèi)容為$GPRMC,hhmmss.dd,s,xxmm.dddd,
由于RMC 中還含有其他數(shù)據(jù),因此為了避免出錯(cuò),在程序上以逗號(hào)為標(biāo)志位進(jìn)行判斷。把時(shí)間和日期分別提取出來(lái)裝載在新數(shù)組A 里。由于接收到的時(shí)間是0 時(shí)區(qū)的時(shí)間,所以在程序?qū)ζ溥M(jìn)行加8 的處理。
其次 把處理好的數(shù)據(jù)的通過(guò)cc1100(采用433HZ,信道為0 發(fā)送給主機(jī)2 并顯示在1602 液晶上。由于考慮天氣等其他可能干擾到GPS 接收的因素,本系統(tǒng)在主機(jī)1 上還加上了DS1302 備用時(shí)鐘芯片進(jìn)行計(jì)時(shí),以保證時(shí)間系統(tǒng)不至于“癱瘓”.
利用GPS 收到的時(shí)間對(duì)DS1302 時(shí)鐘芯片進(jìn)行同步更新。這樣就實(shí)現(xiàn)在無(wú)信號(hào)時(shí)可采用DS1302 時(shí)間作為臨時(shí)時(shí)間發(fā)送給主機(jī)2. 并且為了方便主機(jī)2 區(qū)分接收到的時(shí)間是哪一種的,在主機(jī)1 發(fā)送是采用自制協(xié)議,便于主機(jī)控制器進(jìn)行分辨和操作人員維護(hù)。
2.2 主機(jī)控制器模塊
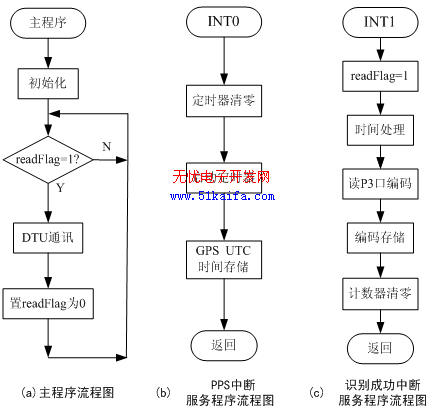
主機(jī)控制器先守候在與信號(hào)源相同的頻率和信道(CH1 授時(shí)信道)上。時(shí)基信號(hào)源一有信號(hào)來(lái)就根據(jù)自制的協(xié)議進(jìn)行判斷數(shù) 據(jù),并點(diǎn)亮相應(yīng)的指示燈,以判斷接收的時(shí)間是GPS 授時(shí)還是DS1302 授時(shí)。提取數(shù)據(jù)后還要判斷季節(jié),如果是5 ~10 月之間的月份,啟用夏季打鈴時(shí)間系統(tǒng),否則啟動(dòng)冬季打鈴系統(tǒng)。如果所接收的數(shù)據(jù)位1 為特殊標(biāo)識(shí)的話,則進(jìn)入緊急狀態(tài),主機(jī)程序工作流程如圖3 所示。
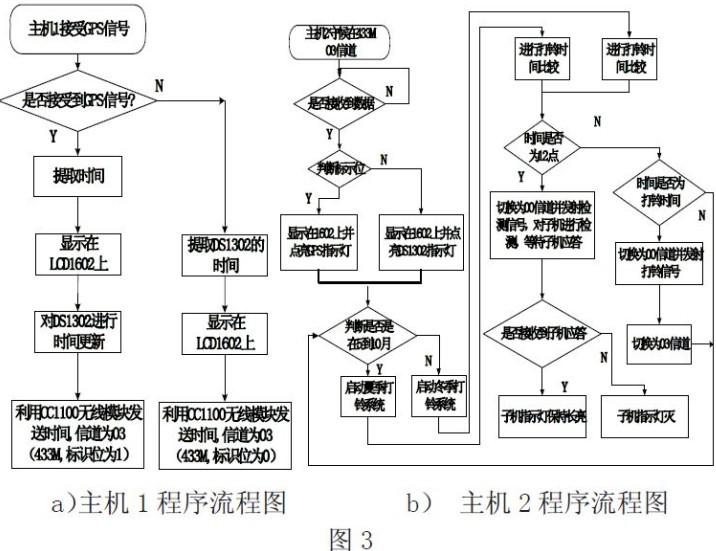
夏季作息打鈴時(shí)間:對(duì)接收到的時(shí)間進(jìn)行判斷,如果符合打鈴時(shí)間,則馬上切換通信信道(CH3 打鈴信道),利用CC1101 向各子機(jī)發(fā)送打鈴控制信號(hào),子機(jī)收到后打鈴。通信結(jié)束后重新切換到CH1 信道(信道)。冬季作息打鈴時(shí)間:除了預(yù)示打鈴時(shí)間外 其他都與夏季一樣。
2.3 系統(tǒng)自檢
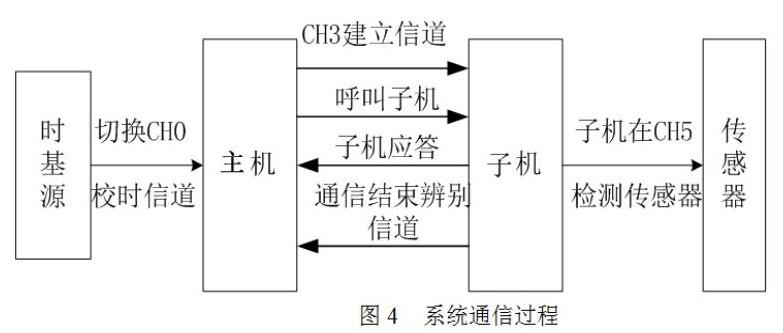
為了保證主機(jī)與子機(jī)的正常通信,主機(jī)2 每天12 點(diǎn)01 分準(zhǔn)時(shí)發(fā)送信檢查信號(hào),工作過(guò)程如下:
切換到信道3(CH3),發(fā)送包含主機(jī)ID 信息的協(xié)議包給所有子機(jī),延時(shí)等待子機(jī)1 應(yīng)答信號(hào),子機(jī)接收到協(xié)議包后判斷ID 號(hào)是否有效,有效則向主機(jī)返回應(yīng)答,否則丟棄。如果主機(jī)長(zhǎng)時(shí)間沒(méi)有接收到應(yīng)答信號(hào),對(duì)應(yīng)I/O 口輸出低電平,指示對(duì)應(yīng)子機(jī)發(fā)生故障,繼續(xù)呼叫下一臺(tái)子機(jī),直到所有子機(jī)檢測(cè)完畢為止。檢測(cè)結(jié)束后切換信道0(CH0),繼續(xù)接收時(shí)基授時(shí)信號(hào)。
子機(jī)1 守候在03 信道,等待信號(hào)。接收到信號(hào)后判斷信號(hào),是打鈴還是檢測(cè)。如果為打鈴則對(duì)應(yīng)的io 口為高電平。繼電器導(dǎo)通打鈴,延時(shí)15 秒后 重設(shè)為低電平。如果為檢測(cè)信號(hào)則發(fā)送應(yīng)答信號(hào)。
2.4 報(bào)警功能
如果有報(bào)警按鍵按下去,則停下子機(jī)工作,子機(jī)切換到CH3信道向主機(jī)發(fā)送報(bào)警信號(hào),并打鈴,直到警報(bào)解除。如果外接有無(wú)線傳感器,子機(jī)通過(guò)CH5 信道巡檢各傳感器。
整個(gè)系統(tǒng)的通信過(guò)程如圖4 所示。
2.5 通信協(xié)議
各模塊之間通信采用簡(jiǎn)單的協(xié)議包完成,根據(jù)具體情況不同,每個(gè)協(xié)議的字節(jié)數(shù)不同,具體如下:
(1)授時(shí)包(主機(jī)接收時(shí)基信號(hào)源)

授時(shí)包由8 個(gè)字節(jié)組成,每個(gè)字節(jié)定義為:0B :標(biāo)識(shí)符,恒為AAH ;1B :年;2B :月;3B :日;4B :時(shí);5B :分;6B :秒;7B :星期。
(2)打鈴控制包(子機(jī)接收)

打鈴控制包為6 個(gè)字節(jié),0B :命令字,不同的命令代表不同動(dòng)作;1B :ID 號(hào),存放子機(jī)的ID 地址;2B :鈴聲的類(lèi)型;3B :
禁聲與否,00H 為禁聲,01H 為正常;4B :保留;5B :保留。
(3)巡檢包(子機(jī)接收)

巡檢控制包為3 個(gè)字節(jié),0B :命令字,不同的命令代表不同動(dòng)作。
1B :ID 號(hào),存放子機(jī)1 的ID 地址。2B :動(dòng)作指令。
(4)子機(jī)應(yīng)答包(子機(jī)發(fā)送)
巡檢控制包為3 個(gè)字節(jié),0B :命令字,不同的命令代表不同動(dòng)作;1B :ID 號(hào),存放子機(jī)2 的ID 地址;2B :動(dòng)作指令。
(5)報(bào)警信號(hào)包(子機(jī)發(fā)送)

巡檢控制包為2 個(gè)字節(jié),0B :命令字,不同的命令代表不同動(dòng)作;1B :ID 號(hào),存放子機(jī)1. 的ID 地址。
(6)傳感器巡檢包(子機(jī)接收)

巡檢控制包為2 個(gè)字節(jié),0B :命令字,不同的命令代表不同動(dòng)作;1B :ID 號(hào),存放子機(jī)2. 的ID 地址;2B :傳感器型號(hào);3B :傳感器動(dòng)作3 作品性能測(cè)試與分析
3.1 系統(tǒng)測(cè)試方案
方案一:在實(shí)驗(yàn)室內(nèi)對(duì)幾個(gè)模塊的性能進(jìn)行測(cè)試,觀察各模塊的工作情況,及各主要元件工作穩(wěn)定性能。
方案二:在學(xué)校內(nèi)對(duì)幾個(gè)模塊進(jìn)行分開(kāi)測(cè)試,觀察各模塊的運(yùn)行情況及數(shù)據(jù)傳輸執(zhí)行情況。
3.2 測(cè)試設(shè)備
頻譜分析儀(AT6010+/AT6011+);數(shù)字式萬(wàn)用表(DT9605A);模擬式萬(wàn)用表(MF-47);標(biāo)準(zhǔn)時(shí)間(IBM 電腦)。
3.3 測(cè)試數(shù)據(jù)
3.4 結(jié)果分析
通過(guò)我們的多次測(cè)試,從各種數(shù)據(jù)反映。本系統(tǒng)性能穩(wěn)定,存在誤差小,可以很好的完成時(shí)間的收發(fā)及相應(yīng)的處理,對(duì)設(shè)置好的打鈴時(shí)間系統(tǒng)能夠準(zhǔn)確的做出相應(yīng)的應(yīng)答,達(dá)到預(yù)期設(shè)計(jì)要求。因電源在測(cè)試過(guò)程的中電壓都可以長(zhǎng)期穩(wěn)定在上述的測(cè)試值,電源的安全性能也是比較可靠。由于我們使用的GPS 模塊是第二代,固其在室內(nèi)的接收性能方面不是很理想,有接收失敗的情況發(fā)生;但我們的設(shè)計(jì)GPS 相關(guān)的模塊是安裝在室外的,固其存在的這一缺陷就不需要做太多的考慮了。
CC1100 無(wú)線模塊的收發(fā)距離在隔有障礙物時(shí)的收發(fā)距離只有150 米左右,空曠場(chǎng)合也只有200 米左右,固是限制其發(fā)展的主要問(wèn)題之一,在一些范圍較大的場(chǎng)合將是本產(chǎn)品的劣勢(shì),但我們可以做多種設(shè)置,在不同場(chǎng)合使用傳輸距離相應(yīng)的無(wú)線模塊就可以解決該問(wèn)題。
4 結(jié)束語(yǔ)
電路的安裝和操作比較簡(jiǎn)單,因主機(jī)1 采用太陽(yáng)能供電,固可以將主機(jī)1 模塊安裝固定在樓頂?shù)扔嘘?yáng)光的地方就可以正常使用了,注意要對(duì)模塊進(jìn)行保護(hù)(太陽(yáng)能接收板除外),盡量把其安裝在干燥陰涼的地方。
主機(jī)2 可以安裝在有人值班的值班室,接220V 市電就可正常工作,因其配備了各模塊的工作指示燈,可以很方便的從指示燈的工作情況判斷出各模塊的工作情況,有利于在出現(xiàn)問(wèn)題時(shí)得到快速準(zhǔn)確解決。
而打鈴儀的安裝也比較簡(jiǎn)單,只要找一個(gè)可以接220V 市電的地方將控制模塊與電鈴固定好就可以了,且其具備了一下載口,用專(zhuān)門(mén)的下載軟件(使用時(shí)要斷開(kāi)220V 電源),可以隨時(shí)對(duì)打鈴的情況進(jìn)行設(shè)置,且電鈴設(shè)有專(zhuān)門(mén)的接口,在電鈴損害時(shí)可以方便的進(jìn)行更換。
注意打鈴儀要安裝在周?chē)諝庵袩o(wú)易燃性、腐蝕性氣體、導(dǎo)電性塵埃、無(wú)顯著搖動(dòng)和沖擊振動(dòng)的環(huán)境中使用。
本設(shè)計(jì)通過(guò)合理選用元件及優(yōu)化的軟硬件設(shè)計(jì),使我們的設(shè)計(jì)具有低功耗、低成本、便攜式、高精度的特點(diǎn)。且本設(shè)計(jì)也據(jù)有較大的升級(jí)空間,可以從軟硬件等多個(gè)方面入手進(jìn)行升級(jí)與優(yōu)化,應(yīng)用范圍廣,有較好的市場(chǎng)前景。
-
控制器
+關(guān)注
關(guān)注
114文章
16998瀏覽量
183173 -
gps
+關(guān)注
關(guān)注
22文章
2967瀏覽量
168595 -
路由器
+關(guān)注
關(guān)注
22文章
3822瀏覽量
116113 -
無(wú)線控制
+關(guān)注
關(guān)注
0文章
97瀏覽量
20206
發(fā)布評(píng)論請(qǐng)先 登錄
基于PIC單片機(jī)和GPS信號(hào)接收電路實(shí)現(xiàn)智能打鈴儀的應(yīng)用方案
智能儀表NM5500多功能校準(zhǔn)器及其他型號(hào)校驗(yàn)儀
SKYLAB詳解智能穿戴GPS模塊SKG09A在多功能智能手表中的應(yīng)用
如何利用GPS設(shè)計(jì)適合于需要精確授時(shí)的高精度時(shí)鐘系統(tǒng)?
GPS衛(wèi)星授時(shí)服務(wù)器在DCS集散控制系統(tǒng)應(yīng)用方案推薦
多功能智能溫度儀表校驗(yàn)儀
GPS高精度水電站授時(shí)系統(tǒng)
基于GPS授時(shí)為基準(zhǔn)的管道破壞預(yù)警監(jiān)測(cè)設(shè)計(jì)
GPS模塊在打鈴控制器中的應(yīng)用

基于ARM的GPS同步授時(shí)系統(tǒng)設(shè)計(jì)

GPS/北斗授時(shí)模塊是怎樣實(shí)現(xiàn)授時(shí)功能的?
基于PIC16F873單片機(jī)和GS-312實(shí)現(xiàn)智能打鈴儀的應(yīng)用方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論