") 基于S3C2440芯片和單片機(jī)設(shè)計壓裝數(shù)據(jù)采集系統(tǒng)的設(shè)計
基于S3C2440芯片和單片機(jī)設(shè)計壓裝數(shù)據(jù)采集系統(tǒng)的設(shè)計
引言
隨著經(jīng)濟(jì)和社會的發(fā)展,我國的工業(yè)水平和信息技術(shù)水平也得到了飛速發(fā)展。其中工業(yè)中最為常見的零部件組裝和裝備壓裝監(jiān)測設(shè)備也得到了不斷的改進(jìn)。壓裝的過程其實就是按規(guī)定的技術(shù)要求將零部件進(jìn)行組培和連接,使之成為半成品或者成品的工藝過程。如圖1所示,就是將兩個零部件進(jìn)行過盈無鍵組裝配合,使之牢固結(jié)合在一起。工業(yè)中很多機(jī)械設(shè)備都是通過這種壓裝方式組合到一起的,包括火車輪對、軸承、汽車發(fā)動機(jī)、變速器、底盤等關(guān)鍵部件。壓裝的質(zhì)量決定了以后產(chǎn)品的使用質(zhì)量和人民的生命財產(chǎn)都息息相關(guān)。我們知道壓裝質(zhì)量的評判標(biāo)準(zhǔn),主要是根據(jù)壓裝過程中壓力和位移的變化曲線來確定的。而壓力位移曲線的獲取這就需要由良好的運(yùn)行穩(wěn)定的數(shù)據(jù)采集系統(tǒng)來提供。基于此,本文提出一種基于UCOS-II的數(shù)據(jù)采集系統(tǒng),在保證實時準(zhǔn)確的數(shù)據(jù)的基礎(chǔ)上,使整個壓裝監(jiān)測設(shè)備能準(zhǔn)確地實時監(jiān)測壓裝曲線,自動判斷壓裝結(jié)果,并將結(jié)果進(jìn)行存儲和統(tǒng)計。

1 、壓裝監(jiān)測設(shè)備系統(tǒng)總述
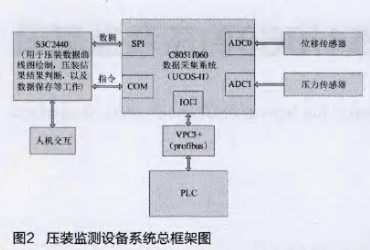
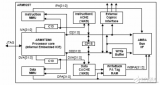
如圖2所示,該壓裝監(jiān)測系統(tǒng)主要由兩部分組成,第一部分是由主控芯片S3C2440構(gòu)成核心控制和數(shù)據(jù)處理單元;它實現(xiàn)壓力位移的數(shù)據(jù)曲線圖繪制、數(shù)據(jù)的分析處理、數(shù)據(jù)的存儲以及人機(jī)交互相關(guān)功能的實現(xiàn)。第二部分是由C8051f060作為控制單元的數(shù)據(jù)采集系統(tǒng),主要的任務(wù)是數(shù)據(jù)實時采集、數(shù)據(jù)發(fā)送、指令的接收以及PLC控制。系統(tǒng)的大概工作流程如下:首先通過人機(jī)交互S3C2440發(fā)送指令給C8051f060,C8051f060處理指令之后通過PROFIBUS總線實現(xiàn)對PLC的開始或停止等相關(guān)操作,當(dāng)接收到開始指令時,C8051f060會同時采集壓裝過程的位移和壓力數(shù)據(jù),并將這些數(shù)據(jù)實時發(fā)送給S3C2440,最后S3C2440會對這些數(shù)據(jù)進(jìn)行曲線圖繪制、結(jié)果判定等操作。
2 、壓裝數(shù)據(jù)采集系統(tǒng)
本文的重點是對壓裝設(shè)備的采集系統(tǒng)進(jìn)行論述。根據(jù)上面的系統(tǒng)總述,我們知道該數(shù)據(jù)采集系統(tǒng)必須達(dá)到以下方面的要求。第一,ADC的選擇,ADC必須是精度足夠高,由于同時采集壓力和位移數(shù)據(jù),并且采集的數(shù)據(jù)量很大,所以必須選擇多通道的高速高精度AD轉(zhuǎn)換器。第二,數(shù)據(jù)傳輸能力,由于設(shè)備壓裝一次所需要的時間很短,為了保證采集之后的數(shù)據(jù)能迅速并實時地在ARM上繪制并判斷,所以數(shù)據(jù)傳輸必須采用高速的傳輸協(xié)議。第三,I/O口的數(shù)量,由于該數(shù)據(jù)采集系統(tǒng)除了采集數(shù)據(jù)之外,它還得實現(xiàn)對PLC的控制,所以在除去其它包括存儲芯片I/O,采集I/O,數(shù)據(jù)傳輸I/O等I/O口之外,必須還得留有多余的I/O口對PLC進(jìn)去控制,所以I/O口數(shù)量要求比較多。
2.1 數(shù)據(jù)采集系統(tǒng)硬件設(shè)計
鑒于以上要求,我們選取C8051f060作為該數(shù)據(jù)采集系統(tǒng)的控制芯片。C8051f060是完全集成的混合信號片上系統(tǒng)型MCU,里面具有兩個16位精度1Msps最高轉(zhuǎn)換速度的AD轉(zhuǎn)換器,轉(zhuǎn)換數(shù)據(jù)直接存儲到RAM中,不需額外軟件開銷,可同時使用的硬件SMBus,高速SPI及兩個UART串行端口,具有 59 個數(shù)字 I/O 引腳。其中串口和SPI口都可直接和ARM連接無需其它驅(qū)動電路。傳感器方面,該系統(tǒng)采用壓力傳感器C9B,位移傳感器PY1,然后對其產(chǎn)生的電壓信號進(jìn)行濾波放大送到單片機(jī)的AD采集端。
2.2 數(shù)據(jù)采集系統(tǒng)軟件設(shè)計
由于該數(shù)據(jù)采集系統(tǒng)是以8為單片機(jī)為控制控制芯片,它得同時處理數(shù)據(jù)采集轉(zhuǎn)換、SPI數(shù)據(jù)傳輸、串口接收、PLC控制等多個任務(wù)。而且對于壓裝系統(tǒng)來說,由于機(jī)器壓裝一次速度很快,并且所采集的數(shù)據(jù)量也很大,所采集及傳輸必須具有很高的實時性。如果用傳統(tǒng)的單片機(jī)編寫程序模式,它的程序規(guī)模會很大,系統(tǒng)調(diào)試復(fù)雜,特別在這種需要運(yùn)行多個并行任務(wù)的情況,就顯得有些力不從心,更主要的是系統(tǒng)的穩(wěn)定性和實時性很難得到保障。
所以本數(shù)據(jù)采集系統(tǒng)采用能實現(xiàn)多任務(wù)同時運(yùn)行的UCOS-II實時操作系統(tǒng)。UCOS-II是有Micrium公司提供的一款可移植、可裁剪的小型多任務(wù)實時操作系統(tǒng),它具有執(zhí)行效率高、占用空間小、實時性優(yōu)良和擴(kuò)展性良好的特點。雖然體積小但它包含了任務(wù)調(diào)度、任務(wù)管理、時間管理、內(nèi)存管理和任務(wù)間的通信和同步等功能。UCOS-II中最大可支持64個任務(wù),分別對應(yīng)優(yōu)先級為0—63,高優(yōu)先級任務(wù)可以搶占低優(yōu)先級CPU資源。多任務(wù)操作系統(tǒng)是把CPU的執(zhí)行分為多個很多個時間塊,任務(wù)A執(zhí)行完后它會把CPU的使用權(quán)交給任務(wù)B,而且高優(yōu)先級的任務(wù)每執(zhí)行會主動放棄一段CPU的使用時間,把使用權(quán)交給其它的任務(wù),這樣多個任務(wù)依次輪轉(zhuǎn)運(yùn)行,由于時間塊很短,這些任務(wù)就好像是在同步并行運(yùn)行了。
本數(shù)據(jù)采集系統(tǒng)如圖3所示將其功能模塊劃分為四個任務(wù):數(shù)據(jù)采集任務(wù)、數(shù)據(jù)發(fā)送任務(wù)、PLC通信任務(wù)、串口讀寫任務(wù)。
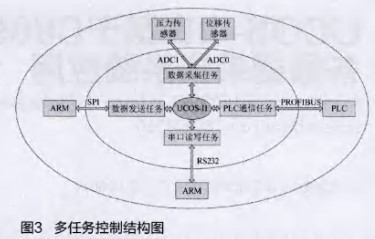
(1)數(shù)據(jù)采集任務(wù):數(shù)據(jù)采集任務(wù)就是每次壓裝開始時,通過C8051f060單片機(jī)片內(nèi)的AD轉(zhuǎn)換器進(jìn)行雙通道的數(shù)據(jù)采集,采集的速度為5kHz。并同時將采集到的數(shù)據(jù)通過DMA方式保存到片外RAM中去。壓裝停止時,停止采集。
(2)數(shù)據(jù)發(fā)送任務(wù):數(shù)據(jù)發(fā)送任務(wù)是將放在片外RAM中所采集的壓力和位移數(shù)據(jù),通過SPI協(xié)議傳輸給ARM處理器,ARM再對這些數(shù)據(jù)進(jìn)行曲線圖繪制和壓裝結(jié)果的判斷等操作。在片外RAM沒有采集數(shù)據(jù)時,該任務(wù)會處于休眠等待狀態(tài)。
(3)PLC通信任務(wù):該系統(tǒng)通過在C8051f060上設(shè)置了14個I/O口與PLC通信,7個輸入和7個輸出。該任務(wù)是一方面監(jiān)測ARM傳送過來的指令,然后對7個輸出口進(jìn)行操作,另一方面不斷監(jiān)測7個輸入I/O口,觀察PLC有沒有發(fā)送指令給ARM。
(4)串口讀寫任務(wù):串口讀寫任務(wù)簡單來講就是接收并讀取來自ARM經(jīng)過RS232發(fā)送過來的指令,然后發(fā)送PLC給ARM的一些信號。
其中最關(guān)鍵的核心任務(wù)是數(shù)據(jù)發(fā)送和數(shù)據(jù)采集這兩個任務(wù)。因為只有等運(yùn)行采集任務(wù),在片外RAM中保存了數(shù)據(jù)之后,數(shù)據(jù)發(fā)送任務(wù)才能發(fā)送。所以在任務(wù)的調(diào)度上為了協(xié)調(diào)好兩者的關(guān)系,于是在這兩個任務(wù)之中加入了一個任務(wù)之間通信的信號量。開始時信號量為0表示RAM中沒有采集的數(shù)據(jù),即數(shù)據(jù)發(fā)送任務(wù)不能進(jìn)行,當(dāng)RAM中保存了一個數(shù)據(jù)之后,信號量置1,數(shù)據(jù)發(fā)送任務(wù)就可以運(yùn)行了,當(dāng)數(shù)據(jù)發(fā)送速度大于數(shù)據(jù)的采集速度時,即RAM中的數(shù)據(jù)為零時,這時候信號量又置0,使得數(shù)據(jù)發(fā)送任務(wù)等待數(shù)據(jù)采集任務(wù)。所以加入信號量之后就能保證任務(wù)之間能正常有秩序的運(yùn)行。
3 、總結(jié)
UCOS-II是一款實用性很強(qiáng)的小型嵌入式實時操作系統(tǒng),隨著整個嵌入式行業(yè)的發(fā)展,它的應(yīng)用也越來越廣泛,優(yōu)越性也愈加明顯。在此壓裝監(jiān)測設(shè)備上,筆者把它移植到了功能強(qiáng)大的C8051f060單片機(jī)上,通過多任務(wù)并行執(zhí)行調(diào)度方式,實現(xiàn)了壓裝監(jiān)測設(shè)備的一個核心單元,即實時數(shù)據(jù)采集系統(tǒng)。UCOS-II與C8051f060的結(jié)合,使得該數(shù)據(jù)采集系統(tǒng)能實時準(zhǔn)確地采集到壓力和位移數(shù)據(jù),并快速的發(fā)送給上層處理單元,使得整個壓裝監(jiān)測設(shè)備能正常穩(wěn)定地運(yùn)行,并取得預(yù)期效果。
責(zé)任編輯:gt
-
芯片
+關(guān)注
關(guān)注
459文章
52308瀏覽量
437945 -
單片機(jī)
+關(guān)注
關(guān)注
6066文章
44946瀏覽量
648313 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
40文章
7041瀏覽量
115975
發(fā)布評論請先 登錄
以s3c2440為例的arm芯片的啟動過程
基于S3C2440的無線物流終端機(jī)的設(shè)計與應(yīng)用
基于S3C2440檢測系統(tǒng)的設(shè)計與應(yīng)用
s3c2440 mmc和camera的linux驅(qū)動

LTC2207在S3C2440和EP3C25控制下的采集應(yīng)用

基于S3C2440和μC%2fOS的FAT文件系統(tǒng)的設(shè)計與實現(xiàn)
S3C2440如何設(shè)置系統(tǒng)時鐘
基于S3C2440的裂紋實時測量系統(tǒng)的設(shè)計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論