 傳感器網絡節點的體系結構及Zigbee傳感器節點的硬件設計
傳感器網絡節點的體系結構及Zigbee傳感器節點的硬件設計
引言
無線傳感器網絡集成了多種技術,包括傳感器技術、計算機技術和通信技術,在軍事、環境、健康、家庭、商業等許多方面有著巨大的潛在應用前景,它通過無數千個微小的節點之間互相通信,通過接力的方法實現大范圍監控的模式不僅提高了工作效率,更有利于技術的監控和管理。通信網絡是通過網絡協議,使得節點之間通過協議進行協調和傳送數據,形成一個無線傳感器網絡。這種網絡的特點是節點密集度高,能夠自主控制和構建,并且自主管理,所以無線傳感器網絡的應用是技術發展的趨勢。
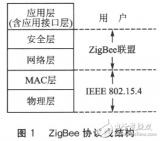
ZigBee聯盟定義了2種物理設備類型:一種是全功能設備FFD(fullfunctiondevice);另一種叫精簡功能設備RFD(reducedfunctiondevice)。網絡的構建需要有協調器參與工作(FFD)。整個網絡的形成過程:首先進行初始化,之后協調器開始參與后建立網絡,網絡建立以后再通過路由器(FFD)和終端設備(RFD)發現網絡,最后在建立起的網絡開始數據管理和傳送。
1 節點硬件設計
傳感器節點是由幾個不同的模塊組成,這些模塊處理著不同的功能,有傳感器模塊,傳感器模塊是傳感的硬件基礎,接著通過處理器模塊,這個模塊執行著重要的功能,數據處理后才能進行通信,還有無線通信模塊和能量供應模塊。傳感器節點主要的功能是:首先進行數據節點的數據采集,采集后的數據再進行處理,經過處理后的數據再通過節點轉發進行融合,同時還有其他節點轉發數據過來,這樣再對所有節點的數據進行管理和融合,數據處理后再進行存儲。所有傳感器的工作原理和結構大致相同,雖然每一種傳感器設計不同,但是基本的架構是相同的。傳感器節點的這種功能等同于兼并傳統網絡的路由功能,作為網絡終端傳送和接收數據,是構成5項網絡的基礎,網線網絡的基本元素是傳感器節點,節點是構成無線傳感網絡的基本平臺。
由于傳統的節點用來采集數據,不僅節點個數多,而且工作時間長、效率低等,此次設計做了些改進。此次采用的硬件設計綜合不同硬件的特點,處理器是采用AVR單片機ATmega128L處理器,它的特點是性能高、速度快、功耗較低,比普通的8位機相比,實用性高、硬件資源豐富。具有高性能、高速度、低功耗和硬件資源豐富的特點。
CPU主要具有幾種省電模式:IDLE、POWERSAVE、POWERDOWM、STANDYBY。在不同的省電模式下可以高效率工作。時鐘控制由8MHz的晶振提供,時鐘頻率可以通過軟件進行更改和選擇。其內部集成的程序存儲器大小為128KB,還有4KB靜態RAM,同時帶有4KB的E2PROM。
1.1通信模塊
CC2420是Chipcon公司開發的一款低功耗通信芯片。它的特點是延遲時間短,使得有更多的充足的睡眠時間,保持這個狀態不僅可以提高效率,節約了能耗,節點的使用壽命也比較可觀。CC2420與處理器的連接方便,通過4個管腳表示數據的狀態,分別為它使用SFD、FIFO、FIFOP和CCA。接口是采用SPI接口,它與CC2420交換數據、發送命令,復位時通過VREG_EN和RESET_N2個引腳實現使能和復位,產生和CC2420匹配的工作電壓,一般大小為1.8V,保證處理器進入正常工作狀態。由于和天線相接的引腳具有高阻抗特點,引腳為RF_P和RF_N。高阻抗匹配需要高阻抗天線,一般要求匹配的負載阻抗為115+j×180。
1.2存儲器部分
此次設計采用串行接口的Flash存儲芯片AT45DB041,它的存儲空間為4Mbit,可以方便地和串口相接。由于1個網絡傳感節點具備路由器和主機2種功能,處理器ATmega128L的片內存儲單元不能滿足要求,所以必須進行相應的擴展。每個節點必須有獨立的序列號,此次設計選擇DS2410Z序列號存儲器。它有64位ROM,內含是48位唯一的序列碼、8位CRC校驗碼和8位家族碼。數據采用1-Wire協議,無需外部供電,僅通過1個信號引線和1個地回路串行傳輸。路由功能采用串行接口的Flash存儲芯片AT45DB041,它擁有4Mbit的存儲空間,可方便地連接在ATmega128L的串口上。
1.3其他模塊
設計采用光敏傳感器,電源模塊由2節1.5V干電池供電。傳感器模塊的選擇相對比較靈活,可以根據實際情況選擇不同的傳感器。節點設計處理器處于省電模式,射頻模塊無任務時處于睡眠模式,以盡量減少節點的耗電。
1.4設計要點
為了減少外圍信號的干擾,必須把信號線、地線分開,分成幾個層次,并且是采用獨立的模塊設計,考慮到設計的幾點體積更精簡,更需要減小信號的干擾,可以用多層板,在高電頻的工作狀態,在該層沒有用做布線的面積均需用銅填充并接到地。
2 節點機的軟件設計
本文采用的開發軟件是WinAVR20050214版本的集成開發環境和AVRStudio4下載程序。軟件模塊主要包括:CC2420驅動程序、網絡路由設計等。
2.1協調器的軟件設計
協調器的軟件流程圖如圖1所示。系統剛開始初始化,硬件協議初始化后開始建立網絡,判斷節點是否接入網絡,接入網絡成功后運行協議任務,接收節點數據并發送到PC上。
建立過程中若超過次數則接收失敗,繼續下一次接收。
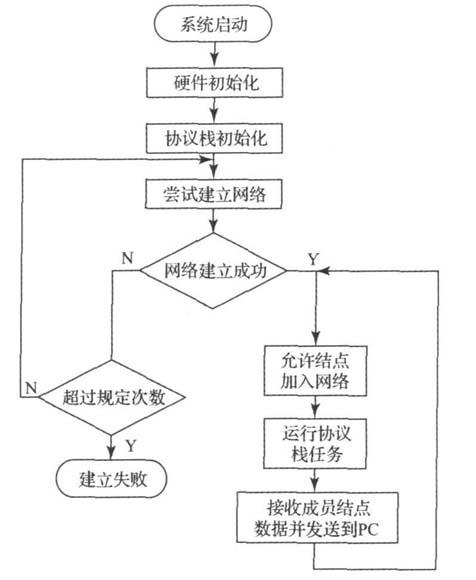
圖1 協調器的軟件流程
2.2成員節點的軟件設計
成員節點主要是采集傳感器數據和接受來自協調器的控制數據。當沒有數據收發時進入休眠狀態,節點功耗降到最低,成員節點的軟件設計流程圖如圖2所示。系統初始化后進行硬件和協議初始化,加載成功后進行協議任務,判斷任務后測量傳感器數據并發到協調器,進入休眠狀態后再執行下一個任務,若超過規定次數,網絡建立失敗。
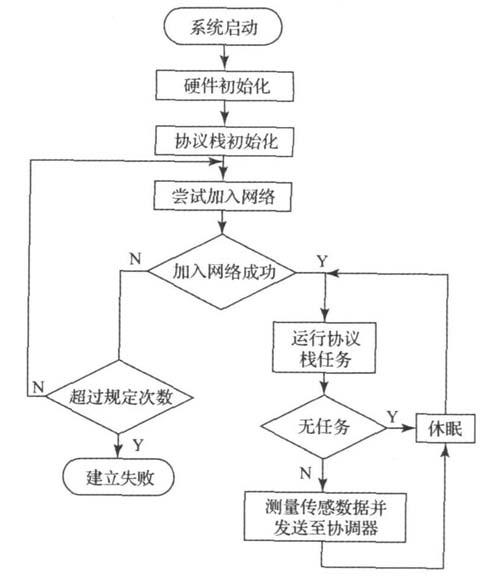
圖2 成員節點的軟件流程
2.3物理層和MAC層的設計
CC2420芯片提供了物理層的數據服務和管理服務,MAC層點到點通信的服務接口通過程序控制CC2420寄存器完成傳感器數據的收發。IEEE802.15.4定義的MAC幀格式:MAC層頭幀;MAC凈載荷;MAC層幀尾。其中,MHR有固定的順序,并不是所有的幀都包含地址域。
2.4網絡層的設計
可以根據實際情況選擇AODV路由或者樹形路由。
ZigBee的網絡層支持多種網絡拓撲結構,針對結點數量的限制選擇星形網絡。在星型網絡中,節點被配置成1個全功能節點和1個或多個簡化功能節點所有的RFD都只能和FFD通信。節點的網絡層協議采用樹形路由算法與AODV路由算法相結合的路由算法,其中樹形路由算法指的是在做路由選擇策略時利用樹形結構址;AODV算法則是對AdHoc按需距離矢量路由算法的改進。本文設計節點組網測試選擇了星形網絡,一個是協調器,另外兩個是光傳感節點,從可視化后臺軟件SNAMP可以看到節點組成的網絡拓撲圖和接收來的數據包,如圖3所示。
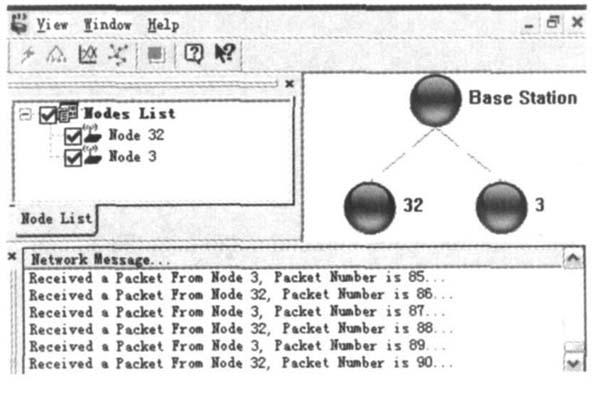
圖3節點硬件實物圖與組網測試
3 結論
通過此次設計,實驗證明了節點的體積小、集成度高、功耗低,通過多層次布線不僅減少了信號的干擾,而且加大了傳輸的距離。軟件設計可以通過節點編程實現協調器、路由器和網絡終端的傳輸。硬件中的模塊設計可以根據具體的需要更改不同的傳感模塊,具有更高的靈活性。
-
傳感器
+關注
關注
2564文章
52655瀏覽量
764099 -
單片機
+關注
關注
6064文章
44932瀏覽量
647393 -
ZigBee
+關注
關注
158文章
2278瀏覽量
245436
發布評論請先 登錄

無線傳感器的網絡節點之硬件設計
MCl3192無線傳感器網絡節點設計解析
無線傳感器網絡的體系結構與特點介紹







 工商網監
工商網監
評論