") 捷聯(lián)式慣導(dǎo)系統(tǒng)的機載安裝誤差對導(dǎo)航精度的影響研究
捷聯(lián)式慣導(dǎo)系統(tǒng)的機載安裝誤差對導(dǎo)航精度的影響研究
引 言
捷聯(lián)式慣導(dǎo)系統(tǒng)(strapdown inertial navigation system,SINS)省掉了機電式的慣性平臺,所以,體積、重量、成本都大大降低。現(xiàn)在,SINS被廣泛應(yīng)用于各類飛行器上,隨著計算機技術(shù)的飛速發(fā)展,捷聯(lián)式系統(tǒng)的應(yīng)用也越來越廣泛。按照工作原理,慣性測量組件(IMU)—陀螺儀和加速度計的組合體應(yīng)該安裝在飛行器的質(zhì)心位置,并且,3只加速度計和3只陀螺儀的3個測量軸應(yīng)該和機體坐標(biāo)系的3個軸完全一致,但是,實際的安裝過程中總會存在安裝誤差,這必將對慣導(dǎo)系統(tǒng)的精度產(chǎn)生影響。隨著人們對SINS的精度的要求不斷提高,對機載安裝誤差的研究已經(jīng)成為捷聯(lián)慣性技術(shù)領(lǐng)域中的重要研究方向。
目前,國內(nèi)外一些大學(xué)和科研機構(gòu)針對機載安裝誤差的研究工作取得了不少進展,這些工作主要集中在對機載位置安裝誤差(桿臂效應(yīng))的研究上。本文深入研究了SINS安裝誤差對導(dǎo)航系統(tǒng)精度的影響,推導(dǎo)出角安裝誤差和位置安裝誤差同時存在時系統(tǒng)的誤差模型,并結(jié)合慣導(dǎo)基本方程和誤差傳播方程,針對飛機平飛和勻加速偏航圓周飛行以及按某一復(fù)雜航跡飛行這3種情況開展了研究。仿真結(jié)果表明:機載安裝誤差對SINS產(chǎn)生影響的大小取決于飛機的機動狀態(tài)和安裝誤差的大小,所得結(jié)果能為動基座慣導(dǎo)初始對準(zhǔn)和系統(tǒng)進行補償與修正的研究提供有效的依據(jù)。
1、機載安裝誤差影響分析
在機載IMU的安裝過程中,由于機體的質(zhì)心位置已經(jīng)安裝有其他機載設(shè)備,使IMU的安裝位置一般不得不偏離飛機質(zhì)心一段距離,或者在安裝過程時出現(xiàn)人為的偏差,這些都會導(dǎo)致安裝誤差的出現(xiàn),可歸納為以下3種情況:
1) 加速度計和陀螺儀的安裝位置偏離飛行器質(zhì)心一小段距離;
2) 3只加速度計和3只陀螺儀的測量軸坐標(biāo)系非正交,并和殼體坐標(biāo)系(標(biāo)定的IMU坐標(biāo)系)存在角誤差。
3) 殼體坐標(biāo)系和機體坐標(biāo)系存在角誤差。
通常,(2),(3)2種情況被稱為IMU安裝角誤差,(1)被稱為安裝位置誤差。安裝位置誤差會引起加速度計輸出中的附加干擾加速度,安裝角誤差不僅會引起附加干擾加速度,還會引起陀螺儀輸出中的陀螺漂移。
1.1 機載安裝位置誤差影響分析
當(dāng)慣導(dǎo)系統(tǒng)的慣性測量部件安裝偏離飛機的質(zhì)心一小段距離時,雖然陀螺儀的輸出不會受到影響,但是,由于存在切向加速度和向心加速度,會引起加速度計的測量誤差,這種現(xiàn)象稱為“桿臂效應(yīng)”,如果基座安裝位置偏離飛機質(zhì)心一小段距離rp,如圖1所示。
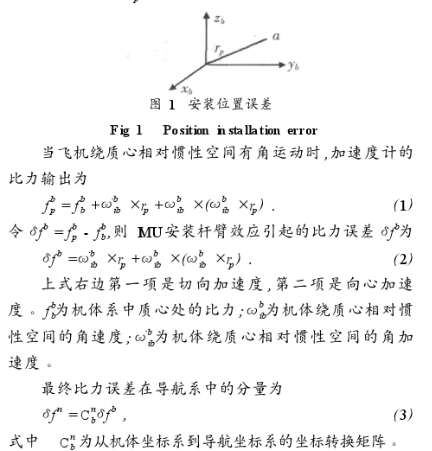
式(3)即為由安裝偏差rp在飛行器有角運動的情況下產(chǎn)生的加速度誤差,相當(dāng)于加速度計的誤差,它體現(xiàn)在速度誤差中,從而引起各種導(dǎo)航參數(shù)誤差。
1.2 安裝角誤差引起的加速度計測量誤差分析
設(shè)SINS加速度計的3個測量軸按xf,yf,***安裝,殼體坐標(biāo)系為xs,ys,zs,此時,每只加速度計測量軸的安裝誤差可以用2個參數(shù)來描述,如圖2所示。考慮到安裝誤差角都是小量,所以,IMU坐標(biāo)系和安裝殼體坐標(biāo)系之間的變換矩陣可寫作為

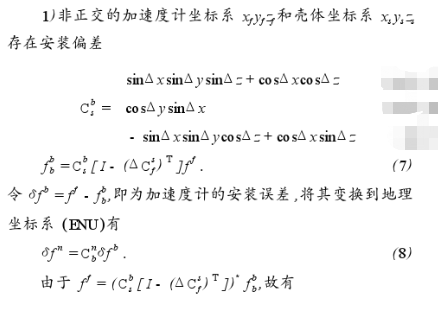
2) 殼體坐標(biāo)系xs,ys,zs和機體坐標(biāo)系xbybzb存在安裝偏差
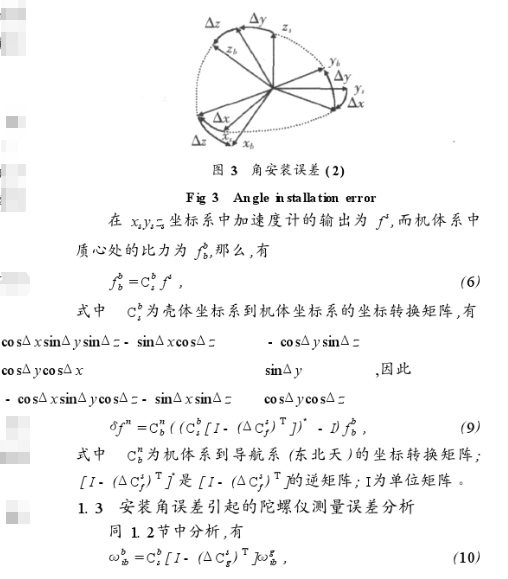
設(shè)SINS中安裝有IMU的殼體沿加xs,ys,zs固定于機體的質(zhì)心,機體坐標(biāo)系為xsybzb,安裝偏差角△x,△y,△z如圖3所示。
1.4 機載安裝誤差綜合影響分析
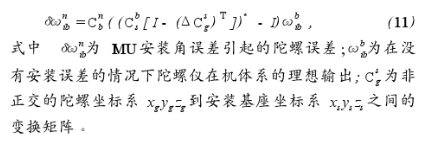
當(dāng)IMU體的中心點相對于質(zhì)心有rp的位置矢量偏差,并且,加速度計和陀螺儀的測量軸坐標(biāo)系非正交,殼體系xsyszs相對于機體系xbybzb有安裝角偏差△x,△y,△z時,由式(10),陀螺儀的輸出為ωgib為
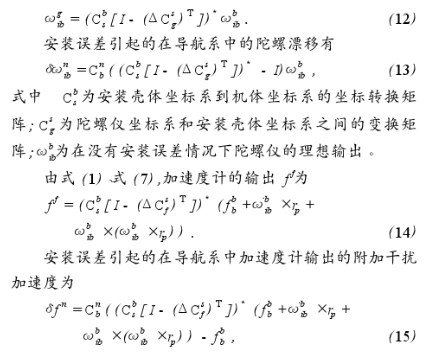
式中Csf為加速度計坐標(biāo)系和安裝殼體坐標(biāo)系之間的變換矩陣;fbb為在沒有安裝誤差情況下加速度計的理想輸出。
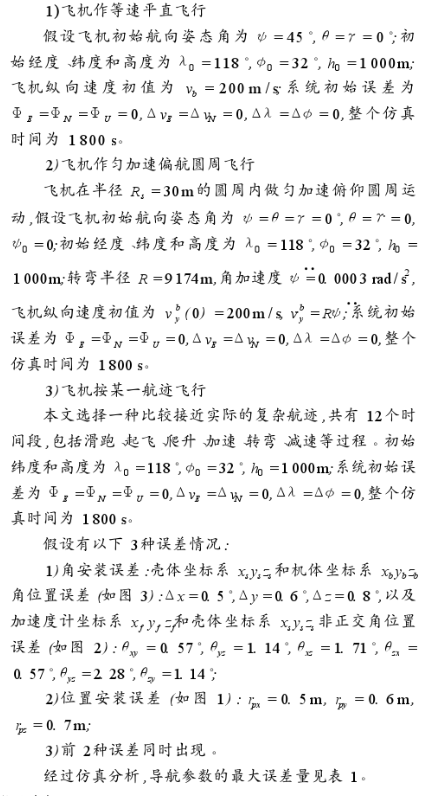
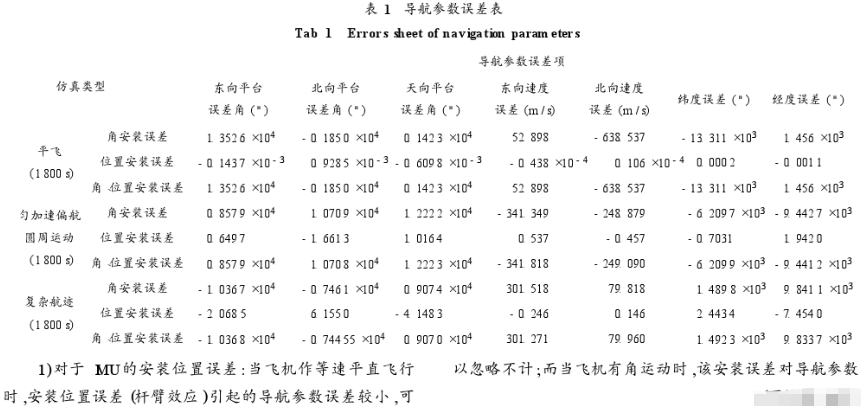
2 、系統(tǒng)仿真和分析
根據(jù)研究問題的側(cè)重點,本文忽略了慣導(dǎo)系統(tǒng)慣性元件安裝及元件測量誤差、導(dǎo)航計算機的計算誤差、重力加速度計算誤差等誤差源,而著重考慮IMU的安裝偏差對導(dǎo)航參數(shù)的影響。
為分析捷聯(lián)慣導(dǎo)IMU安裝偏差對慣導(dǎo)系統(tǒng)導(dǎo)航參數(shù)的影響,本文應(yīng)用慣導(dǎo)系統(tǒng)基本導(dǎo)航方程、導(dǎo)航參數(shù)誤差方程,詳見參考文獻[6],按照2種不同情況進行仿真計算,仿真過程不考慮高度通道。
責(zé)任編輯:gt
-
陀螺儀
+關(guān)注
關(guān)注
44文章
794瀏覽量
99027 -
導(dǎo)航
+關(guān)注
關(guān)注
7文章
536瀏覽量
42594 -
測量
+關(guān)注
關(guān)注
10文章
4962瀏覽量
111898
發(fā)布評論請先 登錄
相關(guān)推薦
嵌入式姿態(tài)測量系統(tǒng)的姿態(tài)參數(shù)怎么計算?
基于MEMS和MR傳感器的姿態(tài)測量系統(tǒng)有什么優(yōu)勢?
【STM32G431試用申請】低成本捷聯(lián)慣導(dǎo)
MEMS和MR傳感器怎么構(gòu)成嵌入式系統(tǒng)姿態(tài)測量系統(tǒng)?
高精度游移方位捷聯(lián)慣導(dǎo)系統(tǒng)的數(shù)字仿真
捷聯(lián)慣導(dǎo)_航位推算組合導(dǎo)航算法研究
捷聯(lián)慣導(dǎo)系統(tǒng)中微機械陀螺測試參數(shù)的分析與標(biāo)定
MEMS傳感器的捷聯(lián)慣導(dǎo)系統(tǒng)設(shè)計中的應(yīng)用
航空航天飛機中慣導(dǎo)系統(tǒng)是如何工作的
航天飛機中慣導(dǎo)系統(tǒng)的工作原理是什么
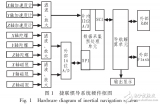
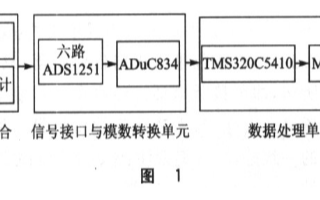
基于TMS320C5410和ADuC834微處理器實現(xiàn)壓電捷聯(lián)慣導(dǎo)系統(tǒng)的設(shè)計
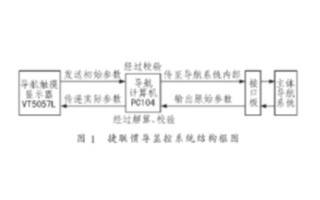
基于觸摸屏和RS-232串口實現(xiàn)捷聯(lián)慣導(dǎo)顯控系統(tǒng)的設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論