") ADXRS角速度檢測(cè)陀螺儀的原理和構(gòu)造及電路設(shè)計(jì)實(shí)現(xiàn)
ADXRS角速度檢測(cè)陀螺儀的原理和構(gòu)造及電路設(shè)計(jì)實(shí)現(xiàn)
一、引言
陀螺儀作為一種慣性測(cè)量器件,是慣性導(dǎo)航、慣性制導(dǎo)和慣性測(cè)量系統(tǒng)的核心部件,廣泛應(yīng)用于軍事和民用領(lǐng)域。傳統(tǒng)的陀螺儀體積大、功耗高、易受干擾,穩(wěn)定性較差,最近美國(guó)模擬器件公司推出了一種新型速率陀螺芯片ADXRS,它只有7mm×7mm×3mm大小,采用BGA-32封裝技術(shù),這種封裝至少要比任何其他具有同類性能的陀螺儀小100倍,而且功耗為30mW,重量?jī)H0.5g,能夠很好的克服傳統(tǒng)陀螺儀的缺點(diǎn)。由ADXRS芯片組成的角速度檢測(cè)陀螺儀能夠準(zhǔn)確的測(cè)量角速度,此外還可以利用該陀螺儀對(duì)角度進(jìn)行測(cè)量,實(shí)驗(yàn)取得了良好的結(jié)果。
二、陀螺儀的原理和構(gòu)造
ADXRS系列陀螺儀是由美國(guó)模擬器件公司制造,采用集成微電子機(jī)械系統(tǒng)(iMEMS)專利工藝和BIMOS工藝的角速度傳感器,內(nèi)部同時(shí)集成有角速率傳感器和信號(hào)處理電路。與任何同類功能的陀螺儀相比,ADXRS系列陀螺儀具有尺寸小、功耗低、抗沖擊和振動(dòng)性好的優(yōu)點(diǎn)。
1、科里奧利加速度
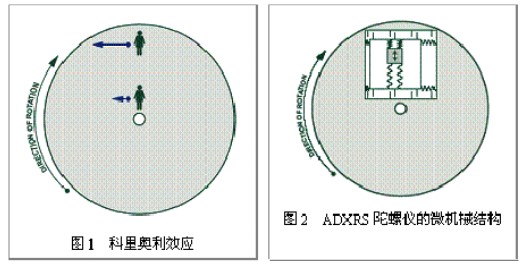
ADXRS系列陀螺儀利用科里奧利(Coriolis)加速度來(lái)測(cè)量角速度,科里奧利效應(yīng)原理如圖1所示。假設(shè)某人站在一個(gè)旋轉(zhuǎn)平臺(tái)的中心附近,他相對(duì)地面的速度用圖1箭頭的長(zhǎng)度所示。如果移動(dòng)到平臺(tái)外緣的某一點(diǎn),他相對(duì)地面的速度會(huì)增加,如圖1較長(zhǎng)的箭頭所示。由徑向速度引起的切向速度的速率增加,這就是科里奧利加速度。設(shè)角速度為w科里奧利加速度的一半,另一般來(lái)自徑向速度的改變,二者總和為2wv旋轉(zhuǎn)平臺(tái)必須施加一個(gè)大小為2Mwv科里奧利加速度,并且該人將受到大小相等的反作用力。的力來(lái)產(chǎn)生。如果人的質(zhì)量為M,該,平臺(tái)半徑為r,則切向速度為wr,如果以速度v沿徑向r移動(dòng),將產(chǎn)生一個(gè)切向加速度wv,這僅是
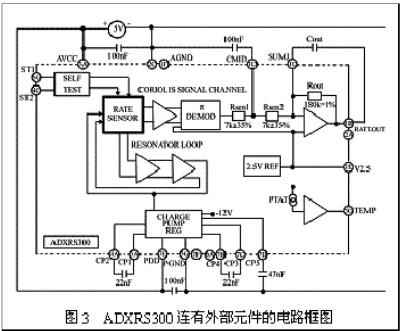
陀螺儀通過(guò)使用一種類似于人在一個(gè)旋轉(zhuǎn)平臺(tái)移出或移入的諧振質(zhì)量元件,利用科里奧利效應(yīng)來(lái)測(cè)量角速度。圖2示出了ADXRS系列陀螺儀完整的微機(jī)械結(jié)構(gòu),陀螺儀通過(guò)附著在諧振體上的電容檢測(cè)元件測(cè)量諧振質(zhì)量元件及其框架由于科里奧利效應(yīng)產(chǎn)生的位移。這些電容檢測(cè)元件都是由硅材料制成的橫梁,它們與兩組附著在基片上的靜止硅橫梁互相交叉,因而形成兩個(gè)標(biāo)稱值相等的電容器。由角速度引起的位移在該系統(tǒng)內(nèi)產(chǎn)生一個(gè)差分電容。如果彈簧的彈性系數(shù)為K2wv M。如果總電容為C2wv,它直接與該角速度成比例。這種關(guān)系的逼真度在實(shí)際應(yīng)用中非常好,其線性誤差小于0.1%。 MC/gK,硅橫梁的間距為g,則差分電容為/K,那么反作用力造成的位移為
2、陀螺儀的構(gòu)造以及電路的實(shí)現(xiàn)
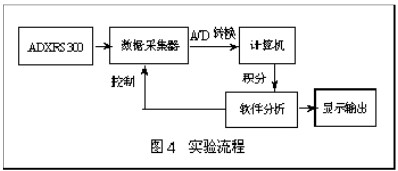
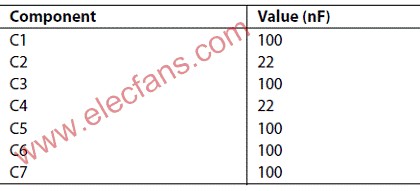
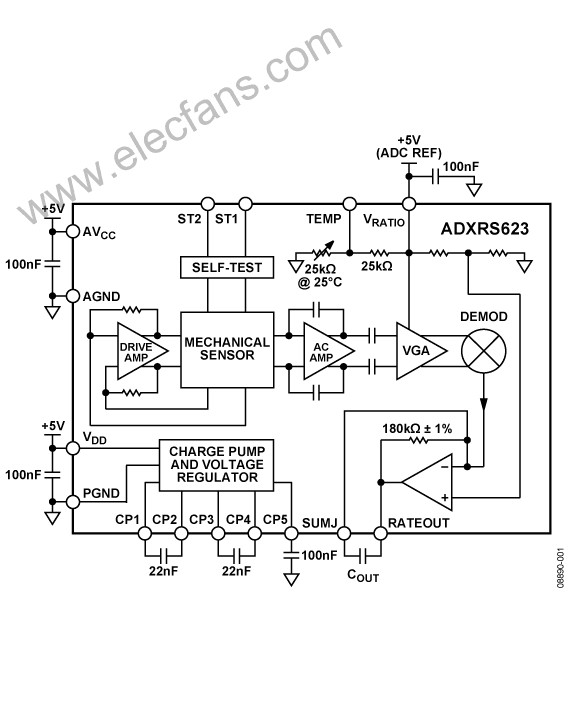
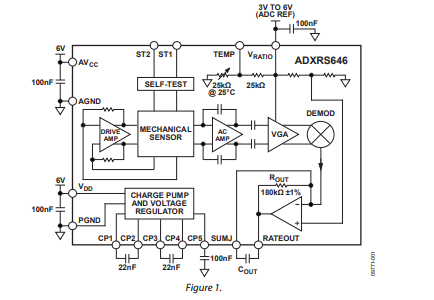
ADXRS系列陀螺儀的外圍尺寸為7mm×7mm×3mm,采用BGA-32封裝技術(shù),有ADXRS150和ADXRS300兩種型號(hào),它們的功能電路完全相同,唯一不同在于前者的量程為±150°/s,后者的量程為±300°/s。圖3顯示了ADXRS300的內(nèi)部電路結(jié)構(gòu)和外圍電路,其中外圍電路主要是電容和電阻組成。
引腳AVCC接5V電源電壓,22nF的泵浦電容用于產(chǎn)生12V的泵浦電壓以供部分電路使用。測(cè)得的角速度以電壓形式在引腳RATEOUT輸出,0°/s時(shí)輸出電壓為2.5V,RATEOUT與引腳SUMJ之間并聯(lián)一個(gè)電阻RoutADXRS300的角速度響應(yīng)帶寬,-3dB頻率由下式?jīng)Q定:和電容Cout,從而組成低通濾波器用于限制
fout = 1 / (2 π ? Rout ? Cout) (1)
內(nèi)部電路的Rout180kΩ,可以從外部給RoutΩ//RextADXRS300的量程為±300°/s,可以在RATEOUT和SUMJ引腳之間給Rout300 kΩ的電阻可以使量程增大50%,但是這需要對(duì)電路重新調(diào)零,調(diào)零時(shí)在SUMJ引腳處外接一個(gè)電阻RnullRATEOUT的零點(diǎn)是2.5V,但角運(yùn)動(dòng)范圍不對(duì)稱時(shí),按下式計(jì)算:到地或電源正極,對(duì)稱角運(yùn)動(dòng)情況下并聯(lián)一個(gè)電阻來(lái)增大量程,例如并聯(lián)一個(gè),從而調(diào)整角速率響應(yīng)帶寬。并聯(lián)一個(gè)電阻Rext,使得Rout=180k為

三、實(shí)驗(yàn)過(guò)程和測(cè)量結(jié)果
ADXRS300陀螺儀直接的用途就是做角速度測(cè)量?jī)x,此外也可以用于測(cè)量物體旋轉(zhuǎn)角度—對(duì)陀螺儀的輸出結(jié)果積分,所得的數(shù)值即為角度。
本實(shí)驗(yàn)即用ADXRS300陀螺儀測(cè)量角度,通過(guò)ADXRS300角速度測(cè)量?jī)x測(cè)量旋轉(zhuǎn)物體的轉(zhuǎn)動(dòng)角速度(注意:陀螺儀可以以任何角度安裝在旋轉(zhuǎn)物體的任何地方,只要測(cè)量使陀螺儀旋轉(zhuǎn)軸和所要測(cè)量的軸平行即可),再對(duì)角速度積分就是我們所要的角度了。根據(jù)此原理,先把陀螺儀的輸出通過(guò)數(shù)據(jù)采集器送入PC機(jī)中,再用軟件進(jìn)行積分并最終顯示結(jié)果。具體流程如圖4。
1、硬件設(shè)計(jì)
測(cè)量角度的具體方法是把ADXRS300陀螺儀固定在由步進(jìn)電機(jī)驅(qū)動(dòng)的圓盤(pán)上,由圓盤(pán)帶動(dòng)陀螺儀轉(zhuǎn)動(dòng),陀螺儀的輸出電壓由F-5101數(shù)據(jù)采集控制器進(jìn)行A/D轉(zhuǎn)換。F-5101的輸入電壓范圍為-5V~5V,A/D轉(zhuǎn)換位數(shù)為12位,轉(zhuǎn)換速度為25ms,適用于本實(shí)驗(yàn)的數(shù)據(jù)采集。
F-5101通過(guò)打印口與計(jì)算機(jī)相連,占用主機(jī)378H和379H兩個(gè)I/O端口。主機(jī)通過(guò)寫(xiě)378H向F-5101送入操作狀態(tài),讀379H得到A/D轉(zhuǎn)換的數(shù)據(jù)。
系統(tǒng)的供電電壓為220V,需要通過(guò)AC220B05-1W5型電源模塊把220V交流電轉(zhuǎn)換為5V直流電供ADXRS300陀螺儀使用。
2、軟件設(shè)計(jì)
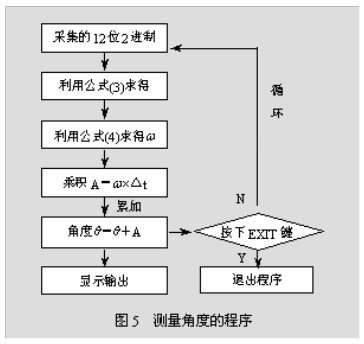
讀取陀螺儀的輸出電壓值,換算成角速度并進(jìn)行積分,最終顯示結(jié)果這一步驟通過(guò)Visual Basic程序來(lái)實(shí)現(xiàn)。從計(jì)算機(jī)379H端口讀取的數(shù)值為12位2進(jìn)制數(shù),利用公式
Vout10× (A×16 + B + C / 16)×4096 – 5 (3)
可以把12位二進(jìn)制數(shù)轉(zhuǎn)換為十進(jìn)制數(shù),從而求得陀螺儀的實(shí)際輸出電壓。其中Vout12位二進(jìn)制數(shù)的高4位、中4位和低4位。電壓值換算成角速度由下式?jīng)Q定:設(shè)角速度為w,則:為輸出電壓,A,B,C分別為
w = (Vout -V0) / 5mV /°/s (4)
其中5mV/°/s為ADXRS300陀螺儀的靈敏度,V2.5V。0為陀螺儀靜止時(shí)的輸出電壓,一般為積分的主要步驟是用角速度w5。乘以程序運(yùn)行一次所用的時(shí)間△t,循環(huán)運(yùn)行程序,對(duì)每次的乘積進(jìn)行累加,并實(shí)時(shí)送出累加結(jié)果,該結(jié)果即為測(cè)得的物體轉(zhuǎn)過(guò)的角度,程序流程如圖
3、實(shí)驗(yàn)結(jié)果
表1列出了陀螺儀轉(zhuǎn)動(dòng)±90°和±180°這四種情況的輸出結(jié)果。
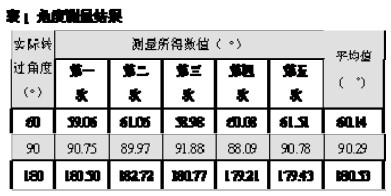
實(shí)驗(yàn)結(jié)果表明:角度相對(duì)誤差小于0.5%,有較高的精度。其中誤差來(lái)源主要包括:
程序運(yùn)行一次所用的時(shí)間△t過(guò)長(zhǎng),造成對(duì)角速度的積分不精確,這是產(chǎn)生誤差的主要來(lái)源。解決的方法是盡量避免冗長(zhǎng)的程序語(yǔ)句,使用運(yùn)行速度較快的計(jì)算機(jī)或者采用更精確的算法。
數(shù)據(jù)采集A/D轉(zhuǎn)換時(shí)可能產(chǎn)生的誤差,造成所積分的角速度不準(zhǔn)確。
四、結(jié)論
隨著微機(jī)械加工工藝和陀螺儀的設(shè)計(jì)技術(shù)水平不斷提高,角速度傳感器正朝著微型化、集成化的方向發(fā)展,外形更小巧,測(cè)量更精確,功能更強(qiáng)大,價(jià)格更低廉的陀螺儀已經(jīng)成為可能。本文介紹的ADXRS角速度檢測(cè)陀螺儀體現(xiàn)了這方面的特點(diǎn),它尺寸小,功耗低,抗沖擊和振動(dòng)性好,電路結(jié)構(gòu)簡(jiǎn)單,能精確測(cè)量轉(zhuǎn)動(dòng)物體的偏航角速度,適用于各種慣性測(cè)量系統(tǒng),是陀螺儀技術(shù)的一個(gè)飛躍。
-
封裝
+關(guān)注
關(guān)注
128文章
8526瀏覽量
144827 -
陀螺儀
+關(guān)注
關(guān)注
44文章
831瀏覽量
99696 -
導(dǎo)航
+關(guān)注
關(guān)注
7文章
547瀏覽量
43017
發(fā)布評(píng)論請(qǐng)先 登錄
急急急~!關(guān)于陀螺儀產(chǎn)生的角速度怎么轉(zhuǎn)換成脈沖的問(wèn)題
ADXRS453陀螺儀的測(cè)試角度
陀螺儀傳感方案ADXRS6 24
如何檢測(cè)陀螺儀是否壞了
通過(guò)陀螺儀測(cè)得的角速度對(duì)時(shí)間求積分的公式對(duì)嗎
基于ADXRS624設(shè)計(jì)的陀螺儀傳感技術(shù)
偏航速率陀螺儀ADXRS623
MEMS陀螺儀應(yīng)用案例:利用ADI ADXRS450檢測(cè)角速度
ADI ADXRS624:完整的陀螺儀傳感方案
ADXRS646: 具有高穩(wěn)定性、低噪聲和振動(dòng)抑制特性的航向角速度陀螺儀

陀螺儀三軸角速度轉(zhuǎn)姿態(tài)角速度
ADXRS646具有高穩(wěn)定性、低噪聲和振動(dòng)抑制特性的偏航角速度陀螺儀技術(shù)手冊(cè)
ADXRS649快速啟動(dòng)、具有振動(dòng)抑制特性的±20,000°/s偏航角速度陀螺儀技術(shù)手冊(cè)
ADXRS624角速度陀螺儀技術(shù)手冊(cè)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論