") 如何用不確定性解決模型問題
如何用不確定性解決模型問題
隨著深度神經(jīng)網(wǎng)絡(luò)功能越來越強(qiáng)大,它們的結(jié)構(gòu)也越來越復(fù)雜。這些復(fù)雜結(jié)構(gòu)也帶來了新的問題,即模型的可解釋性。
想創(chuàng)建穩(wěn)定、不易受對(duì)抗樣本攻擊的模型,可解釋性是很重要的。另外,為新的研究領(lǐng)域設(shè)計(jì)模型也是一項(xiàng)富有挑戰(zhàn)的工作,如果能了解模型在做什么,可以對(duì)這一過程有所幫助。
過去幾年,為了對(duì)模型的可解釋性加以研究,研究者們提出了多種方法,包括:
LIME:通過局部線性近似值計(jì)算解釋模型的預(yù)測(cè)
Activation Maximization:一種能了解那種輸入模式可以生成最大的模型回應(yīng)的方法
特征可視化
在低維解釋空間中嵌入一個(gè)DNN圖層
從認(rèn)知心理學(xué)中借鑒方法
不確定性估計(jì)法——本文關(guān)注的重點(diǎn)
在我們開始研究如何用不確定性解決模型問題、解釋模型之前,首先讓我們了解一下為什么不確定性如此重要。
你為什么應(yīng)該關(guān)注不確定性?
一個(gè)重要的例子就是高風(fēng)險(xiǎn)的應(yīng)用,假設(shè)你正在創(chuàng)建一個(gè)模型,可以幫助醫(yī)生判斷病人的嚴(yán)重程度。在這種情況下,我們不應(yīng)該僅僅關(guān)心模型的精確度,更要關(guān)注模型對(duì)其預(yù)測(cè)結(jié)果有多大程度的肯定。如果不確定性太高,醫(yī)生需要謹(jǐn)慎決策。
自動(dòng)駕駛汽車是另外一個(gè)有趣的例子。如果模型不確定是否有行人在馬路上,我們可以利用這一信息讓車子減速,或者發(fā)出警報(bào)讓駕駛員手動(dòng)操作。
不確定性還可以在缺乏數(shù)據(jù)樣本的情況下幫助我們。如果模型不是在與樣本相似的數(shù)據(jù)上訓(xùn)練的,它可能無法輸出想要的結(jié)果。谷歌照片曾經(jīng)將黑種人錯(cuò)誤地認(rèn)成了大猩猩,就是由于這個(gè)原因,種類單一的訓(xùn)練集可能導(dǎo)致令人尷尬的結(jié)果。
不確定性的最大用途,也是本文的主要目的,就是為模型排除錯(cuò)誤。首先,讓我們了解一下不確定性都有哪幾種不同類型。
不確定性的種類
不確定性和模型都有多個(gè)種類,每一種都有不同的用處。
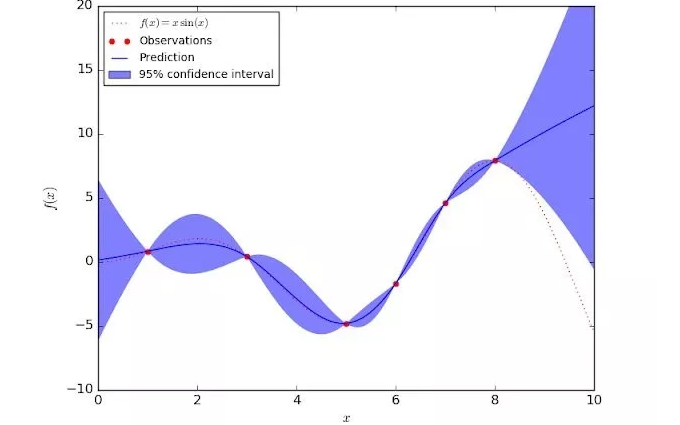
模型不確定性,又稱認(rèn)知不確定性(epistemic uncertainty):假設(shè)你有一個(gè)單一數(shù)據(jù)點(diǎn),想知道哪種線性模型是最適合數(shù)據(jù)的。但是沒有數(shù)據(jù)的話,我們根本無法判斷,所以需要更多數(shù)據(jù)!
認(rèn)知不確定性是由于模型的參數(shù)不確定。我們不知道模型的哪個(gè)權(quán)重能最好地表現(xiàn)數(shù)據(jù),但是數(shù)據(jù)越多,不確定性越低。這種類型的不確定性在數(shù)據(jù)較少的高風(fēng)險(xiǎn)應(yīng)用中很重要。
再比如,你想搭建一個(gè)模型,要在一系列動(dòng)物圖片中預(yù)測(cè)哪種動(dòng)物會(huì)吃掉你。假設(shè)你在訓(xùn)練時(shí)給模型提供的都是獅子和長(zhǎng)頸鹿的照片,現(xiàn)在模型看到了一張僵尸照片。由于之前它沒有見過僵尸,所以這里的不確定性就非常高。如果在訓(xùn)練時(shí)能提供足夠的僵尸照片,那么模型的不確定性會(huì)隨之減少。
數(shù)據(jù)不確定性,也被稱為“任意不確定性”:能夠捕捉觀察中的噪聲。有時(shí)環(huán)境本身是隨機(jī)的,收集更多數(shù)據(jù)并不會(huì)使不確定性降低,因?yàn)樵肼晛碓从跀?shù)據(jù)本身。
為了了解這一點(diǎn),讓我們回顧剛才的動(dòng)物園模型。我們的模型能認(rèn)出含有獅子的圖像,它也許會(huì)判斷你會(huì)被吃掉。但如果獅子此時(shí)此刻并不餓呢?這就是來源于數(shù)據(jù)的不確定性。另一個(gè)案例是兩條看起來一模一樣的蛇,一條有毒而另一條無毒。
數(shù)據(jù)不確定性可以分為兩種類別:
同方差性不確定:對(duì)所有輸入來說,不確定性都是相同的;
異方差性不確定:不確定性根據(jù)不同的輸入有不同差別。例如,對(duì)于一個(gè)可以預(yù)測(cè)圖像中物體深度的模型,一面墻就比一條漸漸消失的線不確定性要高。
測(cè)量不確定性:顧名思義,當(dāng)測(cè)量方法充滿噪音時(shí),不確定性就會(huì)增加。在上述動(dòng)物的案例中,如果某些圖片拍攝的質(zhì)量不好,就會(huì)損害模型的置信度。
噪聲標(biāo)簽:在監(jiān)督式學(xué)習(xí)下,我們用標(biāo)簽訓(xùn)練模型。如果標(biāo)簽太嘈雜,不確定性將會(huì)增加。
以上就是幾種不確定性的類型,在這一系列的后續(xù)文章中,我們會(huì)詳細(xì)解釋。現(xiàn)在,讓我們假設(shè)有一個(gè)黑箱模型,此時(shí)針對(duì)預(yù)測(cè)結(jié)果出現(xiàn)了不確定,我們應(yīng)該如何用它為模型糾錯(cuò)呢?
這里我們以自己的模型為例,該模型是預(yù)測(cè)用戶點(diǎn)擊某個(gè)推薦內(nèi)容的概率,我們稱為CTR(Click Through Rate)。
利用不確定性進(jìn)行debug
模型的嵌入向量表現(xiàn)出了很多分類特征,模型可能很難學(xué)習(xí)特殊值的泛化嵌入。一種常見的解決方法是用一種特殊的詞匯表之外(OOV)的嵌入。
每篇推薦文章都有一個(gè)廣告主(advertiser),所有珍貴的廣告主都有同樣的OOV嵌入,所以,從模型的角度,他們實(shí)際上是一個(gè)廣告主。這個(gè)OOV廣告主有很多不同的項(xiàng)目,每個(gè)都有不同的CTR。如果我們只有廣告主作為CTR的預(yù)測(cè)器,那我們應(yīng)該會(huì)得到OOV的高度不確定性。
為了驗(yàn)證模型的輸出符合OOV的高度不確定性,我們用一個(gè)驗(yàn)證集,將所有廣告主的嵌入轉(zhuǎn)化為OOV。之后,我們開始觀察轉(zhuǎn)化前后,不確定性有什么變化。如此前預(yù)測(cè)的那樣,不確定性在變化之后增加。模型應(yīng)該能學(xué)習(xí)到,當(dāng)給予了信息廣告主,它應(yīng)該減少不確定性。
我們可以對(duì)不同特征重復(fù)這一過程,看它們的不確定性如何改變。
我們甚至可以做得更加精細(xì):一些廣告主在不同的項(xiàng)目之間的CTR不同,而其他的項(xiàng)目幾乎有相同的CTR。我們希望模型能對(duì)前者有較高的不確定性。一種有效的分析是觀察不確定性和CTR之間的相關(guān)性。如果呈負(fù)相關(guān),那就意味著模型無法學(xué)習(xí)不確定性和每個(gè)廣告主之間的關(guān)系。這一工具讓我們了解了,如果在訓(xùn)練過程中或模型結(jié)構(gòu)中有某一部分出了錯(cuò),我們可以怎樣解決它。
我們還可以進(jìn)行相似的分析,看看如果不確定性與特殊項(xiàng)目連接,是否會(huì)減少更多。另外,我們希望模型對(duì)輸出的結(jié)果更加確定,如果不確定,我們會(huì)盡力修復(fù)模型!
另一個(gè)例子是題目特征:含有不常見詞語的標(biāo)題通常具有高不確定性。這是由于模型不經(jīng)常看到這類詞語。我們可以在含有相似題目的驗(yàn)證集中對(duì)模型進(jìn)行驗(yàn)證,估計(jì)模型對(duì)這些標(biāo)題的不確定性是多少。然后重新用這些標(biāo)題訓(xùn)練模型,看看不確定性是否會(huì)下降:
結(jié)語
在很多領(lǐng)域中,不確定性是很重要的問題,更重要的是根據(jù)不同應(yīng)用確定不確定性的種類,然后據(jù)此解決模型的問題。這篇文章我們討論了如何利用不確定性對(duì)模型進(jìn)行debug,在下一篇文章中,我們會(huì)講解如何用不同方法從模型中獲得不確定性的估值。
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4810瀏覽量
102930 -
模型
+關(guān)注
關(guān)注
1文章
3499瀏覽量
50075 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14225瀏覽量
169748
原文標(biāo)題:用模型不確定性理解模型
文章出處:【微信號(hào):jqr_AI,微信公眾號(hào):論智】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何創(chuàng)造可信任的機(jī)器學(xué)習(xí)模型?先要理解不確定性
去嵌入和不確定性是否使用了正確的設(shè)置
是否可以使用全雙端口校準(zhǔn)中的S11不確定性來覆蓋單端口校準(zhǔn)的不確定性?
N5531S TRFL不確定性
基于RFID技術(shù)的供應(yīng)鏈管理項(xiàng)目存在哪些不確定性?
運(yùn)算放大器的開環(huán)電壓增益有哪些不確定性?
基于矩陣分析的一種不確定性推理的數(shù)據(jù)融合方法
基于矩陣分析的一種不確定性推理的數(shù)據(jù)融合方法
考慮模型參數(shù)不確定性的航天器姿態(tài)機(jī)動(dòng)控制
一種求解動(dòng)態(tài)及不確定性優(yōu)化問題的新方法
基于云模型可靠性數(shù)據(jù)不確定性評(píng)價(jià)
知識(shí)系統(tǒng)中的不確定性分析和概念漂移綜述

科技云報(bào)到:數(shù)字化轉(zhuǎn)型,從不確定性到確定性的關(guān)鍵路徑






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論