") 怎樣制作避障小車
怎樣制作避障小車

本項(xiàng)目是在 PVCBOT-A型 基礎(chǔ)平臺車——BEAM小車的基礎(chǔ)上,加裝了避障傳感器以及控制電路,組成了一臺具體有避障功能的小車。而這個(gè)所謂避障小車,實(shí)際上就是和 PVCBOT-1號 機(jī)器人類似的避障機(jī)器人,除了其制作過程是采用了模塊化的開發(fā)思路外,與1號的體型類似且控制電路是一樣的,因此本項(xiàng)目的機(jī)器人可看作是1號機(jī)器人的升級版本——瘋狂小強(qiáng)二代。
雖說本項(xiàng)目機(jī)器人與1號項(xiàng)目機(jī)器人本身有著很多相同之處,但是本項(xiàng)目的重點(diǎn)卻是在于介紹怎么用模塊化的思想去開發(fā)具體的項(xiàng)目,以及介紹如何在A型基礎(chǔ)平臺車上面擴(kuò)展裝備以實(shí)現(xiàn)既定的功能應(yīng)用。
運(yùn)動(dòng)機(jī)理
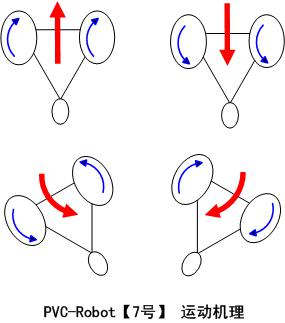
控制前面兩個(gè)輪子的轉(zhuǎn)動(dòng)方向就可以控制整個(gè)機(jī)器人行進(jìn)的方向:
1、左右兩個(gè)前輪都向前轉(zhuǎn),則機(jī)器人向“正前方”直線前進(jìn);
2、左右兩個(gè)前輪都向后轉(zhuǎn),則機(jī)器人向“正后方”直線倒退;
3、左前輪向后轉(zhuǎn),右前輪向前轉(zhuǎn),則機(jī)器人將以后輪為軸心逆時(shí)針轉(zhuǎn)動(dòng),即實(shí)現(xiàn)向“右后方”轉(zhuǎn)彎倒退;
4、左前輪向前轉(zhuǎn),右前輪向后轉(zhuǎn),則機(jī)器人將以后輪為軸心順時(shí)針轉(zhuǎn)動(dòng),即實(shí)現(xiàn)向“左后方”轉(zhuǎn)彎倒退。
控制原理
在機(jī)器人的頭部用鋼絲做兩根觸須,一左一右各連接到一個(gè)碰撞開關(guān),分別控制兩個(gè)前輪的旋轉(zhuǎn)方向。
特別注意,左右觸須與對應(yīng)控制的電機(jī)是交叉過來的,即:左邊的觸須連接右邊的碰撞開關(guān),控制右邊的電機(jī);右邊的觸須連接左邊的碰撞開關(guān),控制左邊的電機(jī)。
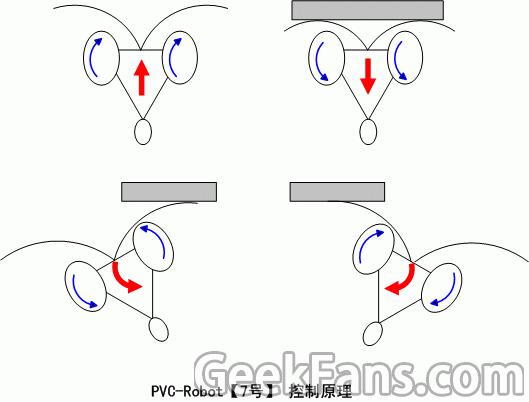
(1)無障礙物
當(dāng)前方都沒有障礙物,左右兩個(gè)輪子都向前正轉(zhuǎn),則機(jī)器人向“前方”直線前進(jìn)。
(2)左前方有障礙物
當(dāng)左前方有障礙物,在左邊觸須碰到障礙物時(shí),控制右邊的輪子反轉(zhuǎn),則機(jī)器人向“左后方”倒退并轉(zhuǎn)彎,即方向轉(zhuǎn)向了障礙物的右邊,從而避開了左邊的障礙物。
向后倒退轉(zhuǎn)彎會(huì)持續(xù)一會(huì),在完成轉(zhuǎn)彎之后,左邊觸須不再碰到障礙物,則兩個(gè)輪子都正轉(zhuǎn),機(jī)器人繼續(xù)向新的沒有障礙物的“前方”直線前進(jìn)。
(3)右前方有障礙物
當(dāng)右前方有障礙物,在右邊觸須碰到障礙物時(shí),控制左邊的輪子反轉(zhuǎn),則機(jī)器人向“右后方”倒退并轉(zhuǎn)彎,即方向轉(zhuǎn)向了障礙物的左邊,從而避開了右邊的障礙物。
向后倒退轉(zhuǎn)彎會(huì)持續(xù)一會(huì),在完成轉(zhuǎn)彎之后,右邊觸須不再碰到障礙物,則兩個(gè)輪子都正轉(zhuǎn),機(jī)器人繼續(xù)向新的沒有障礙物的“前方”直線前進(jìn)。
(4)正前方有障礙物
當(dāng)正前方有障礙物,左右兩邊的觸須都會(huì)碰到障礙物,控制左右兩邊的輪子都反轉(zhuǎn),則機(jī)器人向“正后方”倒退,從而避開障礙物。
在直線倒退持續(xù)了一會(huì)后,左右兩邊的觸須都不再碰到障礙物,則兩個(gè)輪子都正轉(zhuǎn)又變成直線前進(jìn);然后又會(huì)遇到正前方的障礙物又會(huì)直線倒退,再直線前進(jìn)……如此反復(fù)變成一個(gè)死循環(huán)。
理論上會(huì)出現(xiàn)以上這樣的問題,但是實(shí)際上并不會(huì),因?yàn)闊o論是左右輪的摩擦系數(shù)有所差異,還是左右兩組電機(jī)的驅(qū)動(dòng)功率有所差異,或是左右兩組電機(jī)的電源的電量有所差異,又或是障礙物左右兩部分表面的光滑程度有所差異,都會(huì)導(dǎo)致實(shí)際上左右兩邊的觸須碰到障礙物有一個(gè)時(shí)間差,都無法做到兩邊輪子同時(shí)反轉(zhuǎn),也就是說向后倒退的時(shí)候不是完全的直線而是會(huì)有所偏移。而且即便第一次是直線后退,但在往復(fù)幾次碰撞之后肯定會(huì)出現(xiàn)偏移,最終解除循環(huán)避開障礙物向新的方向前進(jìn)。
在視頻中,我們也可以看到這一有趣的一幕,機(jī)器人連續(xù)幾次反復(fù)撞上“墻壁”,最后還是會(huì)重新轉(zhuǎn)向另外的方向。
另外還有一種情況,就是有些時(shí)候機(jī)器人會(huì)卡在墻角停頓了好一陣,然后才轉(zhuǎn)向。這是因?yàn)橛行r(shí)候由于觸須碰撞墻壁的角度比較偏,不是正面碰撞,導(dǎo)致碰撞的力度不夠,觸須無法立即觸發(fā)碰撞開關(guān)響應(yīng),而機(jī)器人在電機(jī)的推動(dòng)下不斷的擠向墻壁,緩慢的擠壓后才觸發(fā)了碰撞開關(guān)控制轉(zhuǎn)向,也就是看到了機(jī)器人在墻角停頓了一會(huì)才轉(zhuǎn)向的情景。出現(xiàn)這情況,如果電機(jī)的輸出功率不足,或是由于電池的電量下降導(dǎo)致動(dòng)力不足,可能會(huì)導(dǎo)致機(jī)器人在墻角無力擠壓觸發(fā)碰撞開關(guān),最終變成卡死在墻角,這個(gè)時(shí)候要么是換大功率的電機(jī),要么就是換新電池。
特別說明:在本項(xiàng)目里面,必須使用具有一定彈性的鋼絲作為觸須,主要是碰撞開關(guān)的能夠觸發(fā)所需要受的力要大于維持觸發(fā)所需要受的力。
觸須在遇到障礙物后,受擠壓到一定程度就會(huì)觸發(fā)碰撞開關(guān),之后機(jī)器人會(huì)轉(zhuǎn)向,而由于彈性的存在觸須還會(huì)還會(huì)觸碰障礙物,受到擠壓還能夠給碰撞開關(guān)施加一定時(shí)間的力使得碰撞開關(guān)沒有立即釋放,讓機(jī)器人的轉(zhuǎn)向會(huì)維持一定的時(shí)間。
當(dāng)機(jī)器人逐漸遠(yuǎn)離障礙物之后,觸須擠壓碰撞開關(guān)的力會(huì)逐漸減小,直到擠壓所產(chǎn)生的力小于維持碰撞開關(guān)觸發(fā)所需要受到的力時(shí),碰撞開關(guān)釋放然后機(jī)器人重新會(huì)前進(jìn)。不過這個(gè)時(shí)候機(jī)器人已經(jīng)轉(zhuǎn)向了足夠的時(shí)間,前進(jìn)的方向已經(jīng)變了,就可以避開障礙物了。
假如使用沒有彈性的觸須,則可能機(jī)器人碰到障礙物之后還沒有來得及足夠時(shí)間的轉(zhuǎn)向,機(jī)器人就又再一次撞上障礙物,而由于這個(gè)時(shí)候離障礙物距離很近再次撞上去的力量會(huì)比較小,甚至無法讓觸須有足夠的力量觸發(fā)碰撞開關(guān)控制轉(zhuǎn)向,這樣最終就變成機(jī)器人卡在障礙物前面動(dòng)彈不得。
另外,使用沒有彈性的觸須,則機(jī)器人瞬間受到的沖擊力會(huì)比較大,還容易造成碰撞開關(guān)或者是機(jī)器人結(jié)構(gòu)的損壞。
假如觸須的角度沒有彎折好,也可能會(huì)出現(xiàn)機(jī)器人在障礙物前反復(fù)“撞擊——退回——撞擊——退回……”的情形,或者最終卡在障礙物前面動(dòng)彈不得的情況。這主要是觸須的彎折程度比較靠后(靠近身體一側(cè)),使得觸須上比較靠近碰撞開關(guān)的位置接觸到障礙物,當(dāng)機(jī)器人遇到障礙物倒退的時(shí)候,觸須的彈性作用沒有發(fā)揮出來,機(jī)器人一旦開始倒退觸須就無法繼續(xù)保持對碰撞開關(guān)的觸發(fā)壓力,導(dǎo)致碰撞開關(guān)立即又釋放,而機(jī)器人沒有持續(xù)倒退到了完全轉(zhuǎn)向的程度,就又開始前進(jìn)去撞擊障礙物,最后反復(fù)以上狀態(tài)而僵持在障礙物前。
要解決這個(gè)問題,可以把觸須的彎折向前方一點(diǎn),即觸須盡量向前伸(對應(yīng)前進(jìn)的方向),而不是往后彎。
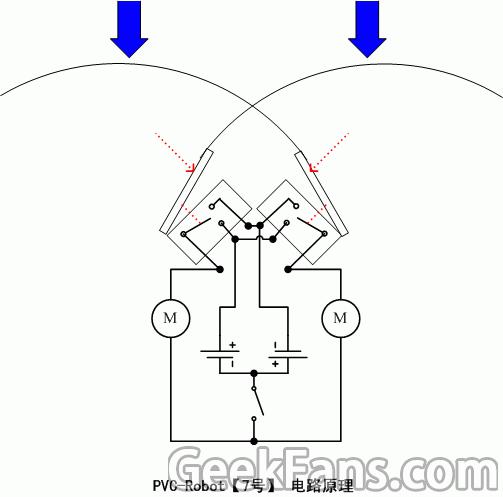
機(jī)器人頭部有兩根鋼絲作的觸須,觸須分別連接在兩個(gè)碰撞開關(guān)上(注意兩根鋼絲對應(yīng)的碰撞開關(guān)是交叉的,即:“左—右”鋼絲,對應(yīng)“右—左”碰撞開關(guān))。
(1)沒有障礙物時(shí),觸須沒有被擠壓,不觸發(fā)碰撞開關(guān),碰撞開關(guān)默認(rèn)的通路,給電機(jī)供給一個(gè)“正方向”的電流,電機(jī)于是“順時(shí)針方向”旋轉(zhuǎn)。
(2)有障礙物時(shí),觸須被擠壓,觸發(fā)碰撞開關(guān),碰撞開關(guān)斷開默認(rèn)通路,連接另外的一組通路,給電機(jī)供一個(gè)“反方向”的電流,電機(jī)于是“逆時(shí)針方向”旋轉(zhuǎn)。
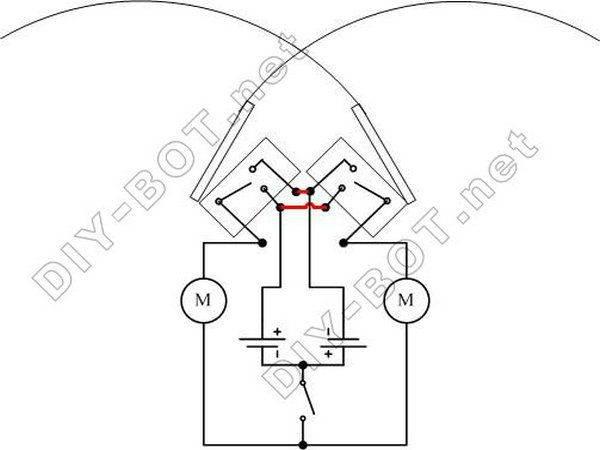
這里給出完整的電路原理圖:
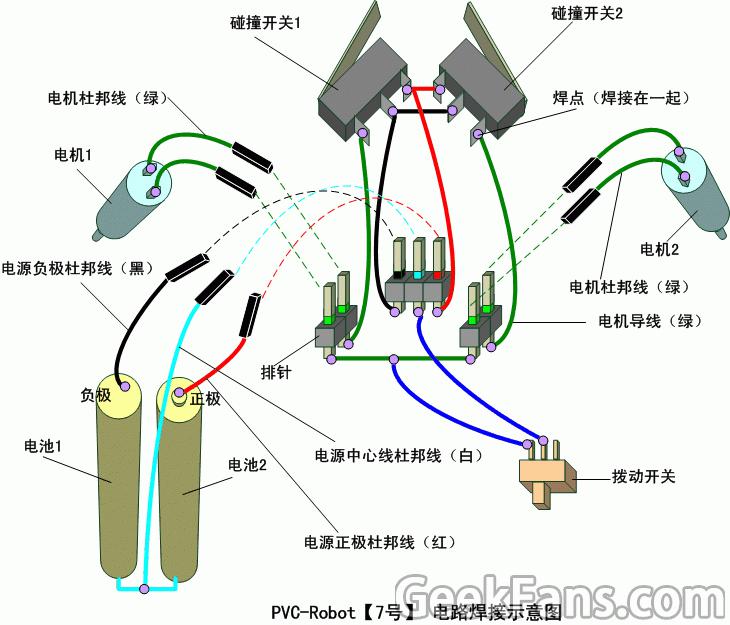
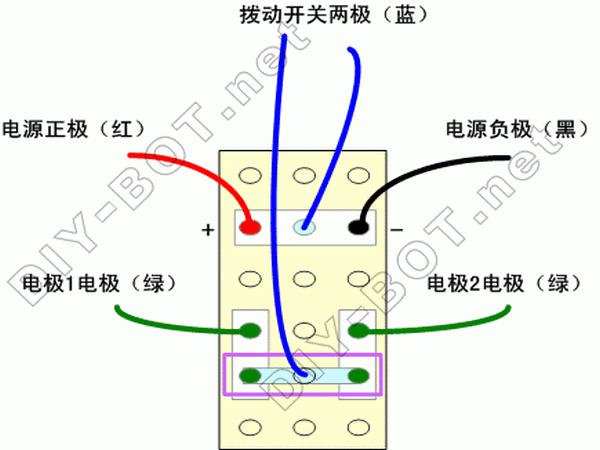
為了方便大家,這里再給出實(shí)物電路接線圖供參考。
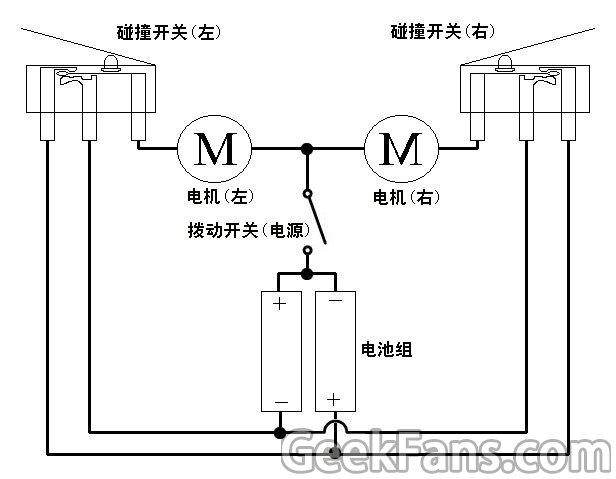
本項(xiàng)目以PVCBOT-A型平臺車為基礎(chǔ),以杜邦線和排針為主要連接方式, 以下為電路焊接示意圖。
準(zhǔn)備工作
本項(xiàng)目需要的器材比較簡單,主要包括:PVC線槽、PVCBOT-A型基礎(chǔ)平臺小車、碰撞開關(guān)、撥動(dòng)開關(guān)、螺絲、排針等。
制作過程——
控制電路:
傳感器:
電源:
總裝:
調(diào)試:
按照電路原理圖或者焊接示意圖進(jìn)行電路檢查,看線路是否連接正確,特別是注意電機(jī)的電機(jī)是否正確。然后接上電池打開開關(guān),檢測電機(jī)的控制效果是正確的:
1、打開撥動(dòng)開關(guān)后,沒有障礙物時(shí),兩個(gè)電機(jī)都是往前轉(zhuǎn)動(dòng)的;
2、左邊觸須被按壓,則右邊的電機(jī)反轉(zhuǎn);
3、右邊觸須被按壓,則左邊的電機(jī)反轉(zhuǎn);
4、兩個(gè)觸須都被按壓,則兩個(gè)電機(jī)都反轉(zhuǎn)。
特別注意,如果發(fā)現(xiàn)某電機(jī)的轉(zhuǎn)向與預(yù)期的相反了,則只要把該電機(jī)的兩根電極杜邦線調(diào)換過來插接即可。
(1)假如小車默認(rèn)情況下是原地打轉(zhuǎn),則說明其中一個(gè)電機(jī)的電源接反了,嘗試把其中任意一個(gè)電機(jī)的兩根電極杜邦線調(diào)換過來(先試第一個(gè)電機(jī),如果不對再試另一個(gè)電機(jī));
(2)假如小車默認(rèn)情況下是直線后退,則說明兩個(gè)電機(jī)的電源都接反了,則同時(shí)把兩個(gè)電機(jī)各自的兩根電極杜邦線都調(diào)換過來。
假如機(jī)器人在障礙物前出現(xiàn)反復(fù)“撞擊——退回——撞擊——退回……”的情形,或者最終卡在障礙物前面動(dòng)彈不得,則:
情況1:觸須過軟
假如觸須過細(xì)過軟,則碰到障礙物時(shí),觸須把碰撞產(chǎn)生的沖擊力都吸收了,無法擠壓觸發(fā)碰撞開關(guān),導(dǎo)致機(jī)器人碰到障礙物也不會(huì)回頭,但又頂著障礙物無法前進(jìn),租后卡死在障礙物前。
這種情況下要解決問題,則需要把觸須換成粗一點(diǎn)硬一點(diǎn)的鋼絲。提示:DIY-BOT網(wǎng)店所提供的套件,里面包含的鋼絲不存在這個(gè)問題。
情況2:觸須過硬
假如觸須是比較粗比較硬,缺乏彈性的,則觸須碰到障礙物時(shí)雖然可以擠壓觸發(fā)碰撞開關(guān)讓機(jī)器人后退,但由于沒有彈性則就沒有起到“存儲(chǔ)碰撞能量”的作用,機(jī)器人開始后退馬上就釋放碰撞開關(guān),沒有能夠讓后退保持一定的時(shí)間,導(dǎo)致機(jī)器人后退還沒有到轉(zhuǎn)向的程度,就又往前沖,最后變得在障礙物前反復(fù)沖撞的情形。
這種情況下要解決問題,則需要把觸須換成稍微軟一點(diǎn)彈性好一點(diǎn)的鋼絲。提示:DIY-BOT網(wǎng)店所提供的套件,里面包含的鋼絲不存在這個(gè)問題。
情況3:觸須彎折的角度不合適
假如觸須的彎折程度比較靠后(靠近身體一側(cè)),使得觸須上比較靠近碰撞開關(guān)的位置接觸到障礙物,當(dāng)機(jī)器人遇到障礙物倒退的時(shí)候,觸須彈性的“存儲(chǔ)碰撞能量”的作用也沒有發(fā)揮出來,就類似上面情況2的情形,機(jī)器人碰到障礙物開始倒退后,無法讓倒退保持一點(diǎn)的時(shí)間,很快就又恢復(fù)前進(jìn)的狀態(tài)往前沖,最后變得在障礙物前反復(fù)沖撞的情形。
這種情況下要解決問題,可以把觸須的彎折向前方一點(diǎn),即觸須盡量向前伸(對應(yīng)前進(jìn)的方向),而不是往后彎。
效果展示——
-
傳感器
+關(guān)注
關(guān)注
2564文章
52805瀏覽量
765590 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29627瀏覽量
212232 -
避障小車
+關(guān)注
關(guān)注
1文章
24瀏覽量
19217
發(fā)布評論請先 登錄






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論