 Dumbo Octopus:重力的衰落
Dumbo Octopus:重力的衰落

Dumbo Octopus從機械外星人的海底家中捕獲,必須穿越一個奇怪而迷失方向的環境,同時避開火箭,激光和其他危險移動動作平臺游戲。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
激光
+關注
關注
20文章
3449瀏覽量
66028 -
游戲
+關注
關注
2文章
772瀏覽量
26767
發布評論請先 登錄
相關推薦
熱點推薦
納祥科技客戶案例 | 集計時、照明、裝飾于一體的電子沙漏計時器方案
傳統沙漏作為計時工具,雖具備儀式感,但存在功能單一、無法實時調整具體定時等局限性。應客戶需求,納祥科技推出了結合LED顯示、重力感應、低功耗等技術的電子沙漏計時器方案,實現傳統沙漏的美學與現代
PPLN應用于惡劣環境中的波長轉換
在我們上一篇文章中《應用探究|PPLN波導賦能量子重力傳感:星載冷原子干涉儀應用》,我們分享了昊量光電提供的英國CovesionMgO:PPLN波導組件應用于重力儀中的冷原子干涉儀的應用,憑借其環境

樹莓派打造零重力實驗室懸浮平臺!
通過打造地面機器人助力太空探索。在最新一期的《樹莓派官方雜志》中,RobZwetsloot深入探究了這一前沿領域。零重力環境十分奇特。我們大多數人很難真正想象出在太空任務中所經歷的那種失重環境,而且

FORVIA佛瑞亞靈盾60骨架大角度乘員保護方案亮相
憑借舒適乘坐體驗,零重力座椅成功俘獲市場的青睞。然而,如何在享受零重力姿態的同時確保乘員安全,已成為行業和監管機構關注的重點。全球汽車科技供應商FORVIA佛瑞亞集團與均勝安全強強聯合,專為中國市場量身定制,強勢推出破局之策——靈盾60骨架。
應用探究|PPLN波導賦能量子重力傳感:星載冷原子干涉儀應用
基于MgO:PPLN波導的1560nm至780nm高效倍頻技術,冷原子干涉技術通過銣原子冷卻與物質波干涉,實現了對于重力加速度的精密測量。憑借由昊量光電代理的英國CovesionPPLN波導在惡劣
提取LSM6DSV16X內置低功耗融合算法輸出的四元數后,轉換成歐拉角后遇到一個問題求解
各位大佬好,在提取LSM6DSV16X內置低功耗融合算法輸出的四元數后,轉換成歐拉角后遇到一個問題,當Y軸與重力方向平行時,輸出的角度與慣性測量單元繞自身Y軸轉過的角度對應不上,且抖動增加,請問有什么解決方法嗎?
發表于 03-14 06:55
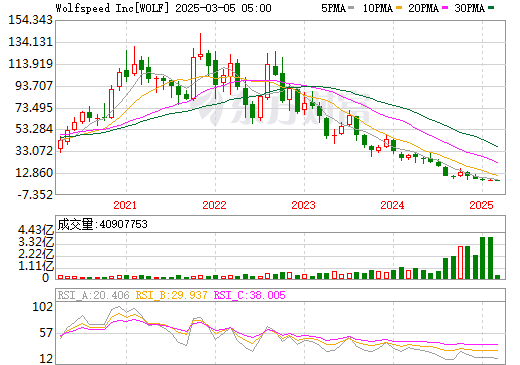
CREE(Wolfspeed)的壟斷與衰落及國產碳化硅襯底崛起的發展啟示
)的壟斷與衰落 技術壟斷期:Wolfspeed(原CREE)曾長期主導全球碳化硅襯底市場,其物理氣相傳輸法(PVT)生長技術及6英寸襯底工藝占據絕對優勢。2018年特斯拉采用碳化硅后,Wolfspeed市值一度飆升,但此后因技術迭代緩慢、成本高企及中國企業的競爭,市值暴
零重力飛機工業完成A+輪融資
近日,零重力飛機工業宣布成功完成超億元人民幣的A+輪融資,標志著該公司在航空科技領域的發展邁出了堅實的一步。此次融資由位于合肥市的肥西縣運河產業基金有限公司領投,深圳市三航創投有限公司作為跟投方共同
零重力飛機工業完成超億元A+輪融資
近日,“零重力飛機工業”成功完成了超億元人民幣的A+輪融資。本輪融資由肥西縣運河產業基金有限公司領投,深圳市三航創投有限公司作為跟投方共同參與。 這筆資金將主要用于推動零重力飛機工業旗下多款新能源
機械能守恒條件在不同情境下的應用
機械能守恒條件在不同情境下的應用是一個廣泛而深入的話題。機械能守恒定律指出,在只有重力或系統內彈力做功的情況下,物體的動能和勢能之和(即機械能)保持不變。以下是一些具體情境下機械能守恒條件
谷歌全新推出開放式視覺語言模型PaliGemma
這種熱烈的反響非常鼓舞人心,開發者們打造了一系列多樣的項目,例如用于印度語言的多語言變體 Navarasa,以及設備端側動作模型 Octopus v2。開發者們展示了 Gemma 在打造極具影響力且易于使用的 AI 解決方案方面的巨大潛力。
功率放大器在重力輔助式Z自由度壓電慣性雙向平順驅動研究中的應用
實驗名稱:功率放大器在重力輔助式Z自由度壓電慣性雙向平順驅動研究中的應用研究方向:精密驅動與定位實驗內容:測試了其頻率特性、水平負載特性、位移曲線、電壓特性、分辨力及其在顯微成像中的應用測試目的
冷靜與熱情:高低溫試驗箱的雙重力量
在現代工業制造中,高低溫試驗箱扮演著關鍵角色,它們不僅能夠模擬極端溫度條件下的環境,還能確保產品在各種極端情況下的可靠性和耐久性。試驗箱的設計和工作原理展示了一種看似矛盾卻又密不可分的雙重力量:冷靜

嵌入式 adxl345測振問題
目前在靜態情況下測得重力加速度是沒有問題的,但校準之后放在測振儀上分別以1m/s2和10m/s2進行測試,測出來的結果分別為0.4m/s2和4m/s2左右。這是什么原因?
發表于 07-23 15:12
adxl345動態測值問題
目前在靜態情況下測得重力加速度是沒有問題的,但校準之后放在測振儀上分別以1m/s2和10m/s2進行測試,測出來的結果分別為0.4m/s2和4m/s2左右。這是什么原因?
目前在測振儀上的數值就是穩定不下來,視頻中在1m/s2的情況下測試,一方面是數值不對,另一方面是數值穩定不了。
發表于 07-23 15:09





 工商網監
工商網監
評論