") can總線結構
can總線結構

CAN總線用戶接口簡單,編程方便。網(wǎng)絡拓撲結構采用總線式結構。這種網(wǎng)絡結構簡單、成本低,并且采用無源抽頭連接,系統(tǒng)可靠性高。通過CAN總線連接各個網(wǎng)絡節(jié)點,形成多主機控制器局域網(wǎng)(CAN)。信息的傳輸采用CAN通信協(xié)議,通過CAN控制器來完成。
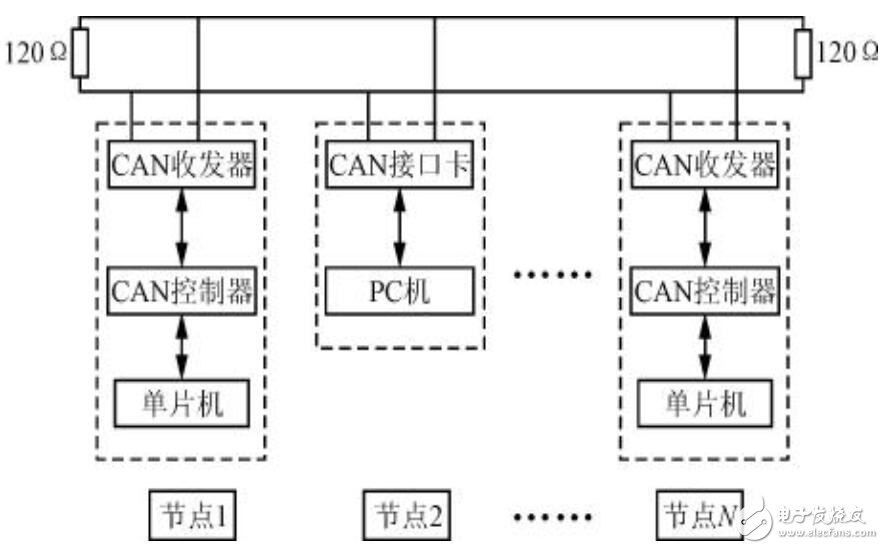
各網(wǎng)絡節(jié)點一般為帶有微控制器的智能節(jié)點完成現(xiàn)場的數(shù)據(jù)采集和基于CAN協(xié)議的數(shù)據(jù)傳輸,節(jié)點可以使用帶有在片CAN控制器的微控制器,或選用一般的微控制器加上獨立的CAN控制器來完成節(jié)點功能。傳輸介質可采用雙絞線、同軸電纜或光纖。如果需要進一步提高系統(tǒng)的抗干擾能力,還可以在控制器和傳輸介質之間加接光電隔離,電源采用DC-DC變換器等措施。這樣可方便構成實時分布式測控系統(tǒng)。微控制器,或選用一般的微控制器加上獨立的CAN控制器來完成節(jié)點功能。傳輸介質可采用雙絞線、同軸電纜或光纖。如果需要進一步提高系統(tǒng)的抗干擾能力,還可以在控制器和傳輸介質之間加接光電隔離,電源采用DC-DC變換器等措施。這樣可方便構成實時分布式測控系統(tǒng)。
CAN總線的物理層是將ECU(Electronic Control Unit-電子控制單元,又稱“行車電腦”、“車載電腦”等)連接至總線的驅動電路。ECU的總數(shù)將受限于總線上的電氣負荷。物理層定義了物理數(shù)據(jù)在總線上各節(jié)點間的傳輸過程,主要是連接介質、線路電氣特性、數(shù)據(jù)的編碼/解碼、位定時和同步的實施標準。理論上,CAN總線上的節(jié)點數(shù)幾乎不受限制,可達到2000個,實際上受電氣特性的限制,最多只能接100多個節(jié)點。
CAN的數(shù)據(jù)鏈路層是其核心內容,其中邏輯鏈路控制完成過濾、過載通知和管理恢復等功能,媒體訪問控制子層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯誤檢測、錯誤信令、應答、串并轉換等功能。這些功能都是圍繞信息幀傳送過程展開的。
-
CAN總線
+關注
關注
145文章
1991瀏覽量
133073
發(fā)布評論請先 登錄

CAN總線通信原理介紹 CAN總線模塊選擇指南
使用CAN總線的注意事項 CAN總線與其他通信協(xié)議對比

CAN總線與LIN總線的區(qū)別
CAN總線通信中的數(shù)據(jù)幀結構解析
如何使用Arduino實現(xiàn)CAN總線通信



【CAN總線知識】全面了解CAN總線協(xié)議







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論