 V2X技術在無人礦山中的應用及測試場景庫和系統
V2X技術在無人礦山中的應用及測試場景庫和系統
2018年12月7日-8日,以“創新驅動、技術引領”為主題的2018第六屆“汽車與環境”創新論壇在上海·安亭正式舉辦。本次論壇完整覆蓋汽車行業技術領域的研討,旨在進一步促進整車企業與零部件企業之間對技術發展趨勢的探討、加強汽車行業專家之間的交流互動、增強整車與零部件企業的交流、搭建合作平臺,通過活動促進汽車零部件產業創新轉型升級、打造更具競爭力的整零協同創新關系,助力實現向汽車強國的轉變。以下是吉林大學計算機學院教授、博導王健在本次論壇上的發言:
吉林大學計算機學院教授、博導王健
今天聽了很多很高大上的報告,我分享一下我們公司在實際落地工程上的一些經驗。給大家看一個這個月我們在內蒙煤礦遇到的一個情況,挖礦灰特別大,攝象頭就會被擋住,這個視覺方案是不起作用了,然后激光雷達比較昂貴,現在一個具體的方案就是用通信的方案來解決。
目前在礦場沒有90后,80后的都很少,在礦上對人的需求就非常迫切。它是一體化的管理,在整個解決方案里面通信是起到非常核心的作用,所有狀態的監控,所有數據的采集,所有控制指令的下發。這個里邊是沒有攝象頭的。我們會用無人機遙感整個道路,測繪出高精度地圖,把地圖存在云端,在云端進行一體化管理。
挖掘機都是無人化挖掘的,這個是均勻化的挖掘。當挖非均勻材質的時候不能無人化。我們會根據高精地圖繪制完成后,在云端做規劃,直接在云端做決策控制車進行執行。我們公司投入了很大的精力在做集群系統。
重點講一下為什么做挖礦這件事,假設一個礦有350臺車,不管是重卡還是寬體都算上,一臺車是2個司機,礦基本是24小時運行,每個司機工作11個小時左右,從6點鐘開始工作。司機每個月工資差不多7-9千元不等,按照8千來算,一個月工資就是560萬人民幣,乘12個月,一個礦上一年的支出是6720萬人力費,一個車按兩年來算,因為從新車買來兩年以后這個車一般會有些損耗,乘2,兩年的人力成本支出就是1.3個億。
它的設備成本我們要改造無人車,變成線控,加通信裝置,加一定的控制裝置,定位裝置,平均38萬左右,同樣要1.3個億,這意味著兩年可以回收整個無人礦山所有的無人成本,投入一次,兩年之內都回收回來,這是能省多少錢。
另外是能多賺多少錢,剛剛我說了一句話,一旦上了無人礦山,以后24小時不休息。兩班倒中間有一個午休,從12點到1點是吃飯時間,所有的車全部停下來,一個小時礦山是停工的,意味著一個小時的時間如果說原來挖煤一個小時一般差不多可以挖兩次,半個小時挖一次。挖兩趟350臺車,拉45噸,煤價每噸500元,一天就能幫他多賺出1575萬元,如果是挖土,按方來算,一立方70元,挖土一個中午一小時挖掉245萬元的土方,兩個合二為一,乘上12個月,乘上24天。所有的車一個月不是滿負荷工作,除節假日、下雨,休息七天,一個月工作24天,乘上去之后,用無人車拉煤能幫你多賺45億,如果說挖土能幫你多賺7個億。
攝象頭我們在用的時候,挖掘機倒土鏡頭就會被遮住,就看不到,我們前面加一個罩可以灑水,灑完水之后一小時之內都是可以工作的,灑多了過一小時全部模糊了,再撒還模糊,慢慢就模糊掉了,再噴水就沒有用了。
這是無人挖掘和重卡在一起,把煤挖上來,挖到土坯場,然后給到重卡,然后運到站臺把煤運走這樣的一個方案,這個方案決定了我們的測試場景。我們的車現模擬很難,因為那個車很大。你沒有辦法像我們乘用車一樣到測試場跑一下,因為那個剎車你如果說急剎很容易把那個大的剎車剎壞了,在對于這種無人礦場做測試的時候,我們現在的方案都是采用虛擬化的測試方案。先在模擬器上跑,跑完之后才能上真的車做實驗。
完成幾個場景,完成自動裝載,完成空載行駛,完成重載行駛,完成自動卸載。我們的車滿載是110噸,拉滿以后重載限速是30公里/每小時,測試這種情況下它的兩車會車,煤的道橫看大概有20多米的寬,兩車會車的時候就很容易把對向車道的車當成是你要防碰撞的,AEB就會觸發出來,要測試一下什么樣的一個算法,讓兩邊的會車在沒有雷達的情況下,能夠支撐在礦上讓兩個車在30公里/小時安全運行。
做這個無人礦場的時候,我發現場景庫決定了產品所應用的場景,比如說現在針對于礦山設計出一個場景庫出來,我來測試這個礦廠。但是這個礦山的場景庫只能用于測試礦山的產品,你拿去做成車就不好用,只能決定在礦山這個場景的使用方法。
我現在對場景庫的理解是決定了一個產品應用場景的,我們就做了一個這樣的東西,這個是我們現在用來做V2X測試的一個場景庫的方法,我們現在在礦區里面踩路,礦區的路相對設計是有嚴格規范的,比如說坡度、寬度、盤旋都是嚴格的,能夠羅列出來把它全部求取出來,功能很簡單,裝載、卸載、空載、滿載四個工況列出來,我們參數速度、剎車距離把這些都設計好以后,就形成了一個可以針對于礦用車輛完成的一個V2X技術方案下的一個測試場景庫。然后把這些基本要素組成寫好,這個是我要測的各個參數,對所有參數都是放在虛擬場景庫里面的。
這是做的另外一個事情,我們幫甲方實現基于V2X無人駕駛能力,甲方就會問一個非常重要的問題,他關心的是我有了V2X之后,這個產品本身增加了哪些賣點,他們要求我們再去做一個基于V2X無人駕駛商品評價的研究,到底哪個方面評價,這個東西加了V2X有多好,沒有加有什么壞處。
這個就是我們被測物,硬件設備、軟件設備、測試工況。我們測試切入的點注入的是原始信號,還是真值,測試原始信號是傳感器一同測,真值是測的背后的傳感算法,或者算法本身看你輸入的情況不一樣。
這是我們現在的一個實際產品,一個臺架。前面看到的表格會選出場景出來,通過發射設備發出來,經過信號源衰落,衰落給被測物,把它們合在一起完成整個V2X測試。
這是一個主測車,這是一個被測車,你在上位機把你要測試的工況都設置好,經過它進行衰落,這個衰落模型可以調,這個上位機可以動態的下發參數。把這個信號下發給被測物,被測物給他一個預警,然后再回來形成一個閉環的報告,記錄什么時間有一個什么樣的工況,被測物是改不了的,這個是由這個天線產生出一個人造出來的位置,欺騙被測物產生一個動態的比例出來。
這個是實測的結果,這個信號完全是一個實驗室環境,通過上位機的閉環能夠把信號激發出來,捕捉到這個彈窗什么時間彈出來的,查到底是漏報還是誤報。這個是信通院的環境,這個是IMA的算法,測它的工況。大家做過Simulink都明白,可以生成代碼放到盒子里。這邊是所有的參數,謝謝大家。
-
無人車
+關注
關注
1文章
307瀏覽量
36830 -
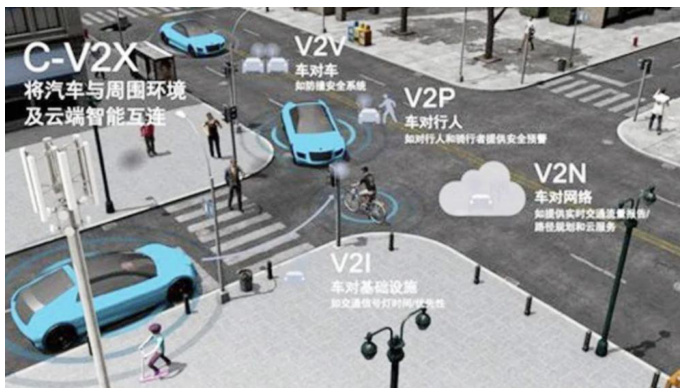
V2X
+關注
關注
25文章
216瀏覽量
44090
原文標題:吉林大學教授王健:V2X技術在無人礦山中的應用及測試場景庫和系統
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
科普|V2X是什么意思?

?車聯網V2X通信:貼片電容信號完整性優化與EMC設計
V2X技術全解析
基于CANoe的V2X安全通信方案
安全可靠的V2X路側基礎設施白皮書發布
自動駕駛測試場景庫的構建及評價方法之場景生成方法研究

V2X車路協同系統

V2X車路協同系統

V2X車路協同系統


SmartDV將SDIO系列IP授權給RANiX開發車聯網(V2X)產品


基于V2X和自動駕駛HIL聯調的仿真測試系統開發

如何應對V2X頻譜挑戰
設計仿真 | 基于VTD的V2X仿真應用






 工商網監
工商網監
評論