 幫你們破除RL的神秘感,理清各算法發展的脈絡
幫你們破除RL的神秘感,理清各算法發展的脈絡

前言
之前通過線上課程學習David Silver的《強化學習》,留下深刻印象的是其中一堆堆的公式。公式雖然嚴謹,但是對于我來說,遇到實際問題時,我需要在腦海中浮現出一幅圖或一條曲線,幫我快速定位問題。正所謂“一圖勝千言”嘛。
最近終于找到了這樣一幅圖。國外有大神用漫畫的形式講解了強化學習中經典的Advantage-Actor-Critic(A2C)算法。盡管標題中只提及了A2C,實際上是將整個RL的算法思想凝結在區區幾幅漫畫中。
我很佩服漫畫的作者,能夠從復雜的公式中提煉出算法的精髓,然后用通俗易懂、深入淺出的方式展示出來。能夠將厚書讀薄,才能顯現出一個人的功力。
有這樣NB的神作,不敢獨吞,調節一下順序,補充一些背景知識,加上我自己的批注,分享出來,以饗讀者。 原漫畫的地址見:Intuitive RL: Intro to Advantage-Actor-Critic (A2C),英語好的同學可以科學上網看原版的。
基本概念
強化學習中最基礎的四個概念:Agent, State, Action, Reward

Agent:不用多說,就是你的程序,在這里就是這只狐貍。
Action: agent需要做的動作。在漫畫中,就是狐貍在岔路口時,需要決定走其中的哪一條路。
State: 就是agent在決策時所能夠掌握的所有信息。對于這只狐貍來說,既包括了決策當時的所見所聞,也包括了它一路走來的記憶。
Reward:選擇不同的路,可能遇到鳥蛋(正向收益),也有可能遇到豺狼(負向收益)。
為什么Actor? 為什么Critic?
正如我之前所說的,Actor-Critic是一個混合算法,結合了Policy Gradient(Actor)與Value Function Approximation (Critic)兩大類算法的優點。原漫畫沒有交待,一個agent為什么需要actor與critic兩種決策機制。所以,在讓狐貍繼續探險之前,有必要先簡單介紹一下Policy Gradient (策略梯度,簡稱PG)算法,后面的內容才好理解。
Policy Gradient看起來很高大上,但是如果類比有監督學習中的多分類算法,就很好理解了。兩類算法的類比(簡化版本)如下表所示,可見兩者很相似
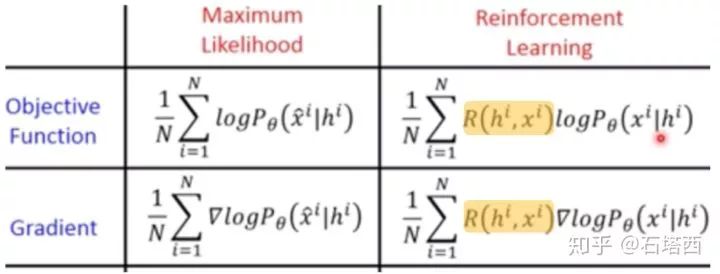
“分類有監督學習”與“策略梯度強化學習”的對比
還是以狐貍在三岔路口的選擇為例
N就是樣本個數
 就是每次決策前的信息,即特征
就是每次決策前的信息,即特征
如果選擇哪條岔道是有唯一正確答案的,并且被標注了,即 ?,則我們可以用“多分類算法”來學習它。
?,則我們可以用“多分類算法”來學習它。
但是,在強化學習中,每次選擇沒有唯一正確的答案,而且每次選擇的收益也是延后的。既然我們不知道所謂“唯一正確答案”,我們就做一次選擇 ?(未必是最優的),再將這個選擇對最終loss或gradient的貢獻乘以一個系數,即上式中的?
?(未必是最優的),再將這個選擇對最終loss或gradient的貢獻乘以一個系數,即上式中的? ,有個學術的名字叫“Likelihood Ratio”
,有個學術的名字叫“Likelihood Ratio”
怎么理解Likelihood Ratio這個乘子?這個乘子必須滿足什么樣的要求?最簡單的形式, ?可以是一次實驗(如AlphaGo的一次對弈,狐貍一天的探險)下來的總收益。從而PG可以寫成如下形式:
?可以是一次實驗(如AlphaGo的一次對弈,狐貍一天的探險)下來的總收益。從而PG可以寫成如下形式:

Policy Gradient公式
 是優化變量
是優化變量
公式左邊是平均收益

公式右邊中,N是總實驗的次數,

 是第n次實驗
是第n次實驗
 是第n次實驗中,第t步時,在當前state是
是第n次實驗中,第t步時,在當前state是
 的概率的情況下,選擇了動作
的概率的情況下,選擇了動作
以上公式表明:
如果第n次實驗的總收益 是正的,則
是正的,則

 假定第n次實驗中的每步決策都是正確的,應該調節
假定第n次實驗中的每步決策都是正確的,應該調節


如果第n次實驗的總收益 是負的,則
是負的,則

 假定第n次實驗中的每步決策都是錯誤的,應該調節
假定第n次實驗中的每步決策都是錯誤的,應該調節


基于“真實有效的決策,在成功實驗出現的次數,比在失敗實驗出現的次數,要多”這樣的假設,以上方法還是能夠學到東西的。
但是,以上算法中統一用 做乘子,還是太簡單粗暴,有些“一榮倶榮,一損俱損”搞“連坐”的味道。因此,在實際算法中,圍繞著policy gradient前的那個乘子,衍生出多種變體,
做乘子,還是太簡單粗暴,有些“一榮倶榮,一損俱損”搞“連坐”的味道。因此,在實際算法中,圍繞著policy gradient前的那個乘子,衍生出多種變體,
比如考慮每步決策的直接收益的時間衰減,就是REINFORCE算法。
如果用V(S),即“狀態值”state-value,來表示PG前的系數,并用一個模型來專門學習它,則這個擬合真實(不是最優)V(s)的模型就叫做Critic,而整個算法就是Actor-Critic算法。
因為篇幅所限,簡單介紹一下V(s)與Q(s,a)。它們是Value Function Approximation算法中兩個重要概念,著名的Deep Q-Network中的Q就來源于Q(s,a)。V(s)表示從狀態s走下去能夠得到的平均收益。它類似于咱們常說的“勢”,如果一個人處于“優勢”,無論他接下去怎么走(無論接下去執行怎樣的action),哪怕走一兩個昏招,也有可能獲勝。具體精確的理解,還請感興趣的同學移步David Silver的課吧。
重新回顧一下算法的脈絡,所謂Actor-Critic算法
Actor負責學習在給定state下給各候選action打分。在action空間離散的情況下,就類似于多分類學習。
因為與多分類監督學習不同,每步決策時,不存在唯一正確的action,所以PG前面應該乘以一個系數,即likelihood ratio。如果用V(S),即state-value,來表示PG前的乘子,并用一個模型來專門學習它,則這個擬合V(s)的模型就叫做Critic,類似一個回歸模型。
如果用Critic預測值與真實值之間的誤差,作為likelihood ratio,則PG前的乘子就有一個專門的名稱,Advantage。這時的算法,就叫做Advantage-Actor-Critic,即A2C。
如果在學習過程中,引入異步、分布式學習,此時的算法叫做Asynchronous-Advantage-Actor-Critic,即著名的A3C。
狐貍的探險
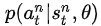
上一節已經說明了狐貍(Agent)為什么需要actor-critic兩個決策系統。則狐貍的決策系統可以由下圖表示
state是狐貍做決策時所擁有的一切信息,包括它的所見所聞,還有它的記憶。
critic負責學習到準確的V(s),負責評估當前狀態的“態勢”,類似一個回歸任務。
actor負責學習某狀態下各候選action的概率,類似一個多分類任務。
在第一個路口
狐貍的critic覺得當前態勢不錯,預計從此走下去,今天能得20分,即V(s)=20
狐貍的actor給三條路A/B/C都打了分
狐貍按照A=0.8, B=C=0.1的概率擲了色子,從而決定走道路A(沒有簡單地選擇概率最大的道路,是為了有更多機會explore)
沿A路走,采到一枚蘑菇,得1分
把自己對state value的估計值,采取的動作,得到的收益都記錄下來
在接下來的兩個路口,也重復以上過程:
狐貍的反思:更新Critic
畢竟這只狐貍還太年輕,critic對當前狀態的估計可能存在誤差,actor對岔道的打分也未必準確,因此當有了三次經歷后,狐貍停下來做一次反思,更新一下自己的critic和actor。狐貍決定先更新自己的critic。
之前說過了,critic更像是一個“回歸”任務,目標是使critic預測出的state value與真實state value越接近越好。以上三次經歷的state value的預測值,狐貍已經記在自己的小本上了,那么問題來了,那三個state的真實state value是多少?
在如何獲取真實state value的問題上,又分成了兩個流派:Monte Carlo(MC)法與Temporal-Difference(TD)法。
MC法,簡單來說,就是將一次實驗進行到底,實驗結束時的V(s)自然為0,然后根據Bellman方程回推實驗中每個中間步驟的V(s),如下圖所示(圖中簡化了Bellman方程,忽略了時間衰減)。MC法的缺點,一是更新慢,必須等一次實驗結束,才能對critic/actor進行更新;二是因為V(s)是狀態s之后能夠獲得的平均收益,實驗越長,在每個步驟之后采取不同action導致的分叉越多,但是MC法僅僅依靠上一次實驗所覆蓋的單一路徑就進行更新,顯然導致high variance。
Monte Carlo法
另一種方法,TD法,就是依靠現有的不準確的critic進行bootstrapping,逐步迭代,獲得精確的critic
現在狐貍要反思前三個狀態的state value,狐貍假定當前critic(老的,尚未更新的)在當前狀態(第4個狀態)預測出state value是準確的, ?=18
?=18
根據V(s)的定義,V(s)代表自s之后能夠獲得的平均收益,既然
 =18+2=20
=18+2=20
同理, =
= ?+
?+ =20+20=40
=20+20=40
同理, =?
=? +
+ ==40+1=41
==40+1=41
Temporal-Difference法
如上圖中狐貍的記事本所示,對于以上三步,狐貍既有了自己對當時state value的預測值,也有了那三個state value的“真實值”,上面的紅字就是二者的差,可以用類似“回歸”的方法最小化求解。
狐貍的反思:更新Actor
正如前文所述,critic的作用是為了準確預測Policy Gradient前的那個系數,即Likelihood Ratio。
likelihood ratio>0,應該調節actor的參數,提升 的概率,即鼓勵當時采取的動作
的概率,即鼓勵當時采取的動作
likelihood ratio<0,應該調節actor的參數,降低 抑制當時采取的動作
抑制當時采取的動作
那么critic應該為PG貢獻一個什么樣的likelihood ratio呢?考慮以下的例子
在一個三岔路品,狐貍感受到的狀態是前路有狼、陷阱和破橋,哪條道都不好走,因此狐貍預測當前“狀態值”極差, =-100
=-100
狐貍還是硬著頭皮選擇了一條稍微好走的路,中間丟失了許多食物,收益=-20
恰好過了橋之后,一天也就結束了,最終狀態的 =0。根據critic bootstrapping進行回推,當初過橋前
=0。根據critic bootstrapping進行回推,當初過橋前 “真實狀態值”=-20
“真實狀態值”=-20
那么actor中,policy gradient之前的likelihood ratio應該是多少?能不能選擇采取動作之后的直接收益,-20?如果是的話,因為選擇過橋,導致狐貍丟了20分,以后狐貍在相同狀態下(看見前路有狼、陷阱和破橋)選擇“過破橋”的概率應該降低!!!
以上結論顯然是不合適的,下次不選橋,難道要選狼與陷阱?!哪里出錯了?
換個思路:
當初在岔路口時,狐貍對當時state value的預測是-100,
選擇了破橋之后,根據critic bootstrapping推導回去,發現之前在岔路口時的狀態還不至于那么差,“真實state value”=-20。
回頭來看,選擇“破橋”還改善了當時的處境,有80分的提升。
因此,之后在相同狀態下(看見前路有狼、陷阱和破橋)選擇“破橋”的概率,不僅不應該降低,反而還要提高,以鼓勵這種明智的選擇,顯然更合情合理。
這里,某個狀態s下的state value的“真實值”與預測值之間的差異,就叫做Advantage,拿advantage作為Policy Gradient之前的乘子,整個算法就叫做Advantage-Actor-Critic (A2C)。
Advantage
注意state value的“真實值”與預測值之間的差異在Actor與Critic上發揮的不同作用
在Actor中,這個差值就叫做Advantage,用來指導Actor應該鼓勵還是抑制已經采取的動作。動作帶來的Advantage越大,驚喜越大,下次在相同狀態下選擇這個動作的概率就應該越大,即得到鼓勵。反之亦然。
在Critic中,這個差值就叫做Error,是要優化降低的目標,以使Agent對狀態值的估計越來越準確。間接使Actor選擇動作時也越來越準確。
其他
A2C的主要思路就這樣介紹完畢了。在原漫畫中,還簡單介紹了A3C、Entropy Loss的思想,就屬于旁枝末節,請各位看官們移步原漫畫。其實A3C的思路也很簡單(實現就是另一回事了),無非是讓好幾只狐貍并發地做實驗,期間它們共享經驗教訓,以加速學習。
A3C
小結
本篇算是一個半原創吧,在翻譯的同時,也增加了我對Actor-Critic的理解。
對于初學RL的同學,希望本文能夠幫你們破除RL的神秘感,理清各算法發展的脈絡,以后在David Silver課上看到那些公式時,能夠有“似曾相識”的感覺。
對于掌握了RL基本算法的同學,也希望你們能夠像我一樣,當遇到實際問題時,先想到漫畫中的小狐貍,定位問題,再去有的放矢地去翻書找公式。
很佩服原漫畫的作者,能將復雜的公式、原理用如此通俗易懂、深入淺出的方式講明白。再次向原作者致敬,Excellent Job !!!
-
算法
+關注
關注
23文章
4709瀏覽量
95354 -
強化學習
+關注
關注
4文章
269瀏覽量
11597
原文標題:看漫畫學強化學習
文章出處:【微信號:AI_shequ,微信公眾號:人工智能愛好者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
感測元件發展5大趨勢
【秀作品海報制作】獎品收到了-藝術范兒的卡酷機器人
?Deity Microphones 發布Pocket Wireless無線話筒
魅族X計劃神秘開啟,重磅新品即將登場
錢包被掏空, 三星 S8 甩 iPhone 7一條街!
錢包被掏空,三星S8定價完爆iPhone 7
vivo高端黑色光影風vivoXplay6照片神秘浮現,質感爆棚!
iphone8、三星note8最新消息:iPhone8、三星Note8曝光全靠它們,細說“神隊友”配件廠商
人工智能邁入第三波發展 未來將可自動建立脈絡
SpaceX2018年首次發射成功 發射富有神秘感
這款創意燈白天隱身 夜晚發光
探索神秘而又圈粉無數的商顯利器LED透明屏





 工商網監
工商網監
評論