 線性伺服電機定位系統簡化安全攝像機定位設計
線性伺服電機定位系統簡化安全攝像機定位設計

全球范圍內的安全和安全問題導致安全和監控攝像頭的使用大幅增加,通常使用高分辨率CCD或CMOS成像器,這些成像器與基于云的視頻分析相結合,用于生物識別和面部識別分析。
然而,為了使生物識別算法正常工作,攝像機定位系統必須具有平穩的操作,以避免在攝像機運動時出現不必要的圖像失真。許多需要謹慎或遠程訪問的應用也要求系統緊湊和節能。
線性伺服電機定位系統可以提供所需的平穩運行,但它們的代價是更高的功率和需求高分辨率編碼器和精密電路。另外,步進電機具有多種吸引人的視頻監控定位功能,包括靜止時的全扭矩,出色的啟動,停止和反向響應時間,無誤差累積的運動重復性,以及固定步長的簡單開環控制。
然而,固定步長是一個限制 - 即使200步/旋轉電機的步長為1.8°,對于高分辨率視頻來說也不夠平滑。這可以通過微步進來克服,新的微步進驅動器IC使設計人員能夠快速實現緊湊的高分辨率,低功耗定位系統。
步進電機基礎
步進電機是無刷直流電機,將完整旋轉分成相同數量的步驟。定子包含固定數量的纏繞電磁鐵。轉子結構有三種類型 - 永磁(PM),可變磁阻(VR)和混合動力。永磁電動機具有圍繞轉子圓周嵌入的交替的南北永磁體。 VR轉子由軟磁材料制成并切入齒(從末端看,轉子看起來很像齒輪)。 VR電機的工作原理是在最小間隙時發生最小磁阻,因此轉子齒被定向磁極吸引。
混合式步進電機有一個齒形轉子,如VR電機,以及一個軸向軸周圍的磁化同心磁鐵。這種布置提供了類似于VR電動機的步長(可能的齒數大于PM轉子中可能的磁體數量),具有改進的扭矩特性。
定子中的相繞組數通常為兩個,但也可提供三相和五相電機。電機可以兩種方式纏繞 - 單極或雙極。圖1和圖2顯示了兩相電機中的兩個選項。
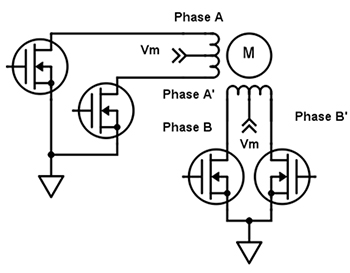
圖1:在兩相單極繞組中,中心抽頭連接到電機電壓,相腳切換到接地以改變電流方向。 (使用Digi-Key Scheme-It繪制的圖表)
單極繞組每相具有一個繞組,帶有中心抽頭。中心抽頭通常連接到電動機電壓源,每個繞組的兩端交替接地,以反轉該繞組提供的磁場方向。這使電機控制簡單,但電機效率較低,因為一次只使用一半繞組。
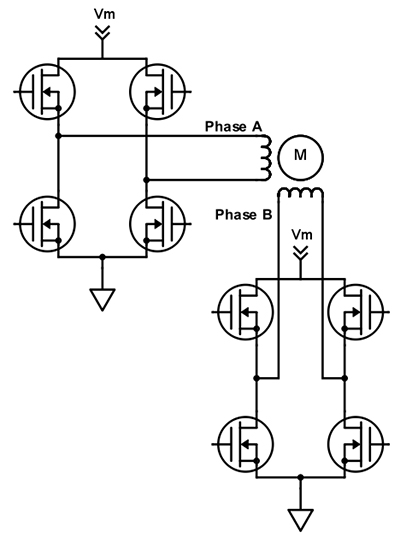
圖2 :在雙相雙極繞組中,使用H橋驅動器反轉相電流,允許總繞組立即通電。 (使用Digi-Key Scheme-It繪制的圖表)
雙極布置使用所有相繞組,但切換驅動電流更復雜。通常,這是通過H橋驅動器完成的,它也可以控制繞組中的電流(電機轉矩與電流成正比。)
監控攝像機中使用的步進電機通常是兩相混合型或PM雙極型。在兩相電動機中,定子中的電磁鐵對略微偏移,使得當一個繞組斷電并且下一個繞組接通時,齒將被吸引到下一個位置。這允許步數為轉子齒數的四倍。因此,50齒轉子每轉200步,或每步1.8°。
步進排序
雙極步進電機有兩個繞組。通過順序改變繞組中的電流來移動轉子。可視化的一種便捷方法是使用相圖。
圖3顯示了使用圖2中的雙極繞組的全步操作。
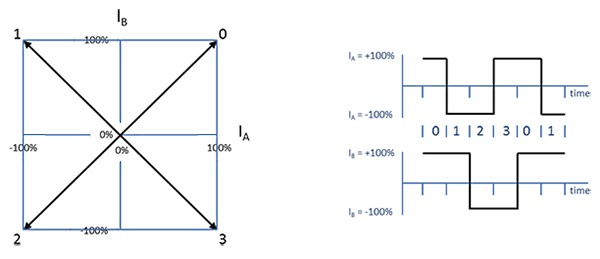
圖3:在全步操作中,每個繞組中的相電流為-Imax或+ Imax。每次狀態變化都會使電機向前移動一步。 (來源:Digi-Key)
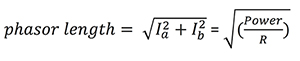
在全步操作中,每個繞組中的電流為-Imax或+ Imax。圖3時序圖中所示的相電流變化將導致圖3的相圖位置序列。相圖周圍的每個90?狀態變化都會使電機向前移動一步。相圖箭頭(相量)的長度顯示在EQ1中:
轉矩與電流(直到磁飽和)和相量長度成正比給出了功率消耗的指示。當然這是理想情況,忽略了繞組特性的瞬時影響。
圖4顯示了半步進操作。這里允許每個繞組中的電流為-Imax,0或+ Imax。這允許在整個步驟之間進行“半步”,因此每轉的步數加倍,從而允許更精細的定位。但是,要付出代價。請注意,當一個繞組值為0時,軸上的相量長度較短(約70%)。通過增加另一個繞組中的電流可以稍微減輕該轉矩脈動。

圖4:在半步操作中,每個繞組中的電流為-Imax,0或+ Imax。這使步數加倍,但存在電流和轉矩波動。 (來源:Digi-Key)
如果你進一步采用半步進的概念,并允許繞組中的電流以模擬具有恒定相量長度的正弦交流波形的方式變化,如圖5所示,您可以通過低扭矩紋波實現更精細的分辨率。這通常被稱為正弦 - 余弦微步進。在圖5中,整個步驟中的微步數是4。這被稱為四分頻微步進。
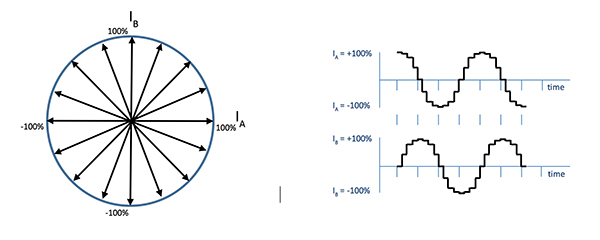
圖5:在四分頻正弦 - 余弦微步進中,通過改變模擬正弦交流波形中的相電流來減小轉矩脈動。 (來源:Digi-Key)
雖然有些驅動器可以支持高達256分頻的微步進,但實際上,最小步長和步進可重復性是負載動態的函數,電機繞組特性,以及驅動器電壓和電流能力。
救援的集成驅動器
監控攝像機定位系統通常需要從幾度到超過200度/秒的平移速率以及每秒5?到10?的傾斜速率。機械扭矩范圍通常約為10盎司 - 英寸,電機輸入電壓通常在12 V至40 V范圍內。
微步進提供平滑的步進能力,快速平移,傾斜和變焦速率,以及精確定位監控攝像系統所需要的。然而,滿足這些要求的驅動電子設備是復雜的。幸運的是,市場上有很好的集成驅動器產品可以大大簡化工作。
Allegro Microsystems的A5984是一款帶有轉換器的微步驅動器,非常適合單軸攝像機定位應用。它可以提供全,半和微步進模式,最高可達32分。它的工作電壓范圍為8到40 VDC,每相可以輸出和吸收高達2 A.它采用24引腳QFN或TSSOP封裝,可輕松適應小型定位系統。這些封裝都具有裸露焊盤,有助于熱管理。
圖6顯示了A5984的功能框圖。 DIR引腳決定電機方向,STEP引腳使電機以完整或分步的方式前進,具體取決于MSx引腳。 MSx引腳選擇全步,半步或4,8,16或32分頻模式。翻譯器負責實現這些模式所需的相序。控制軟件只需為每次移動增量設置方向和脈沖STEP引腳。這允許使用簡單,低成本,低功耗的MCU。
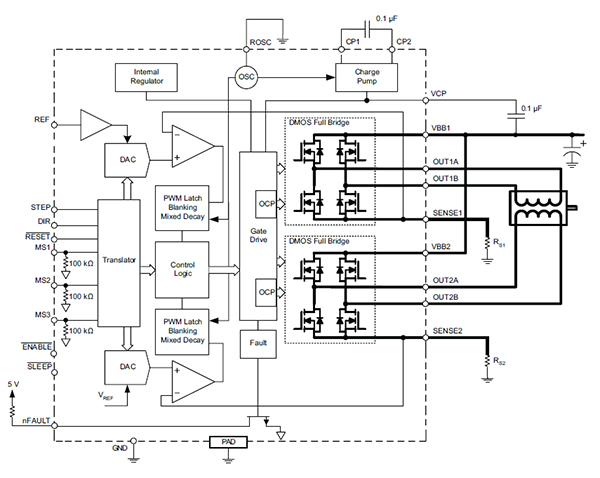
圖6:在帶有轉換器的Allegro Microsystems的A5984微步進驅動器中,內部雙H橋驅動器由轉換器,內部控制邏輯和恒定關斷時間脈沖寬度調制(PWM)驅動器控制,易于使用。 (來源:Allegro Microsystems)
每相的電流通過固定的關斷時間脈沖寬度調制(PWM)控制進行調節。一個特殊功能是自適應百分比快速衰減(APFD)電流控制模式。 APFD逐步自動調節電流控制斬波電路中的衰減量。這消除了電流連續性通過零的問題,這可能導致在低速時錯過步驟(圖7和8)。此功能在相機定位系統中很重要,因為錯過的脈沖顯示為運動抖動。 APFD還可以降低系統中的整體電流紋波,從而增強平穩運行。
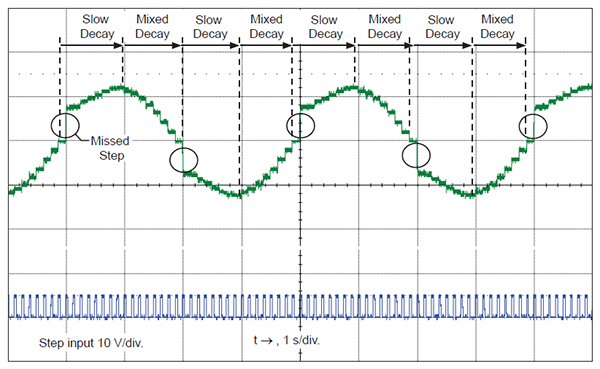
圖7:固定斬波器衰減時間可導致零交叉處錯過脈沖以踩踏速度慢。 (來源:Allegro Microsystems)
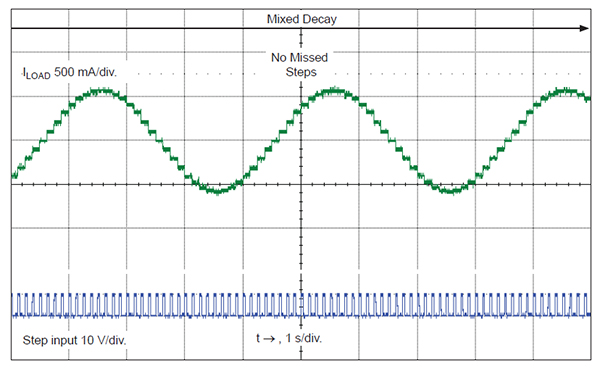
圖8:自適應百分比快速衰減(APFD)為每個脈沖添加適當數量的快速衰減,以消除電流不連續性和慢速錯過脈沖。 (來源:Allegro Microsystems)
通過禁用輸出,電機輸出可自動保護,免受短路負載和電池短路或接地短路。這些故障通過nFAULT引腳報告。還提供欠壓鎖定和熱關斷以提供額外保護。
此驅動器系列中的其他器件可用,包括用于雙軸應用的雙驅動器。
超平滑雙驅動器
定位系統運動控制的另一種方法可以在安森美半導體的LV8714TA中找到。這是一款雙步進電機驅動器,因此可以處理平移和傾斜任務。它可以驅動8至16 V的電機,每相最高1.5 A.它采用節省空間的7 x 7 mm TQFP裸露焊盤封裝(圖9)。
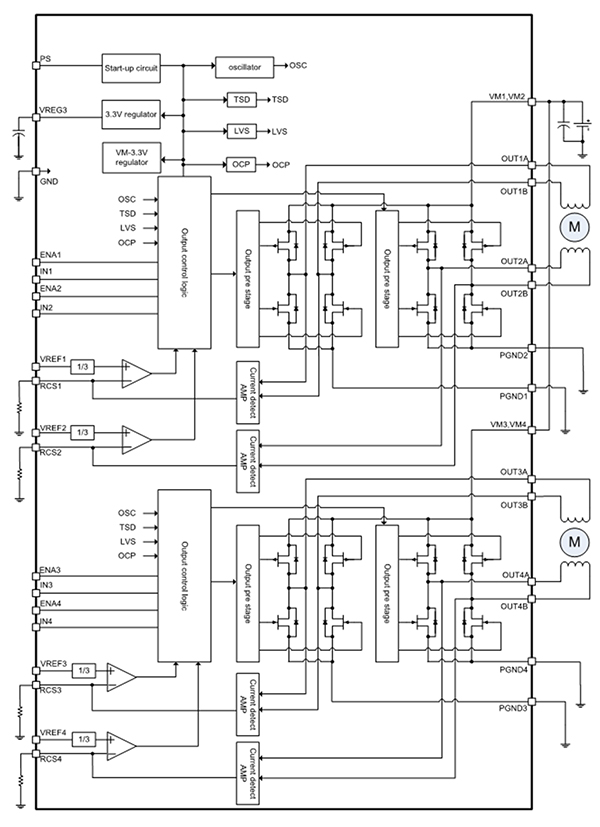
圖9:安森美半導體的LV8714TA集成了雙步進電機驅動器,因此一部分可以驅動平移和傾斜電機。 (來源:安森美半導體)
每個電機由兩個使能引腳和兩個輸入引腳控制。輸入引腳上的相位輸入序列決定了步進的方向,如表1所示。
INx ENA1,ENA2相位方向0-90 90-180 180-270 270-360 IN1 HLLHH正轉IN2 HHLLH IN1 HHLLH反轉IN2 HLLHH
表1:LV8714TA步進方向由電機INx引腳上的相位輸入序列控制。 (來源:安森美半導體)
與大多數步進電機驅動器不同,LV8714TA不采用外部電流檢測電阻。相反,它使用專有的內部電流檢測機制來結合VREFx引腳(每個電機相位一個)監視和控制線圈電流。相位中所需的最大線圈電流由連接到RCSx引腳的電阻設置。該相VREFx引腳的恒定值將產生該相的恒定電流,并且每個相變將采用一個完整的步驟,如表1所示。
但是,如果90°偏移,則完全整流電壓正弦波 - 與相位輸入同步 - 應用于電機相對的VREFx引腳,線圈電流將通過步進順序變化,從而產生微步進。通過這種方式,可以實現大于256分頻的微步進,從而實現超平滑操作(圖10)。
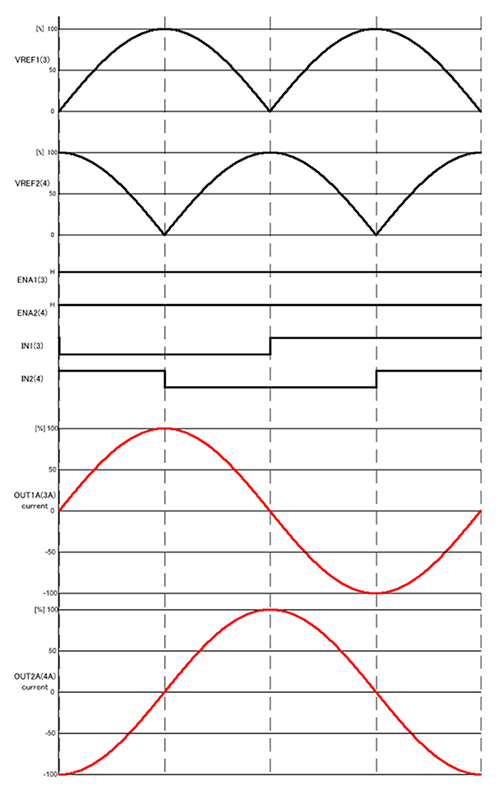
圖10:在安森美半導體的LV8714TA步進驅動器上,VXF引腳上的INx引腳和全波整流正弦電壓波形相結合,可產生精細的微步線圈電流。 (來源:安森美半導體)
這種性能的折衷更多是軟件復雜性,因為主機微控制器需要在整個步驟序列中控制INx引腳和VREFx引腳。 VREFx波形可通過適當的數字電位器或數模轉換器(DAC)進行控制。
該器件具有欠壓,過流和過溫保護功能,并具有非常好的功能。低待機電流1μA(典型值)。
結論
監控攝像機定位系統需要平穩準確的操作,以滿足高分辨率攝像機和先進監控軟件的需求。雙極步進電機與合適的微步進控制器相結合,可以提供這種性能水平,同時滿足成本,能源效率和包裝需求。
-
半導體
+關注
關注
335文章
28903瀏覽量
237714 -
電機
+關注
關注
143文章
9298瀏覽量
149435 -
攝像機
+關注
關注
3文章
1703瀏覽量
61400
發布評論請先 登錄
索尼攝像機系統的使用功能

索尼攝像機系統的應用功能

索尼推出首款攝像機跟蹤系統OCELLUS
云酷科技藍牙人員定位系統:精準定位+智能管理,開啟企業安全管理新范式

AI智能識別監測攝像機

鐵路位移智能識別攝像機:提升鐵路安全監測的核心力量

伺服電機有什么用,伺服電機可以當普通電機用嗎
越界智能監測攝像機:安全防護的新利器

探索伺服轉臺型云臺驅動方案在云臺攝像機中的神奇應用
戴頭盔識別攝像機


步進電機伺服控制系統的作用
行為分析智能監測攝像機

人員定位管控系統如何解決廠區內安全管控問題?
藍牙人員定位系統-4G/5G+藍牙+LoRa人員定位系統





 工商網監
工商網監
評論