 飛馬F300在大面積實景三維模型生產中的應用
飛馬F300在大面積實景三維模型生產中的應用
飛馬F300無人機一經推出,就受到了廣大用戶的喜愛。尤其是其免像控技術的加持,讓航測外業省去了大量像控點布設和測量的麻煩,大大提高了航空攝影測量外業的工作效率。同時其還提供載荷的多種選擇,不但可以選擇正射相機,還可以選擇多鏡頭傾斜相機,這在輕型固定翼無人機中是首創。本文要討論的應用,正是基于飛馬F300飛行平臺,搭載傾斜相機進行傾斜攝影測量[1]外業航飛,并對獲取的影像進行處理,經過空三計算和模型重建來生產城市真實景三維模型[2]。本項目采用布設稀少像控點的方案進行工程的施測。
一、工程項目概述
1.1、項目基本情況
為推進長嶺縣基礎設施建設,促進長嶺縣城市及經濟發展,我司受甲方委托,對長嶺縣城區進行地理信息數據的采集。項目要求采用傾斜攝影測量技術[1],并生產城市實景三維模型。此工程測區面積約11平方公里,位于吉林省西北部,整體地勢平坦,有國道和省道穿過測區,交通較便利。測區屬中溫帶大陸性季風氣候,年平均氣溫4.9℃;測區內常年有風,項目施測季節最大風力可達8級,對無人機飛行有很不利影響。項目飛行空域已由甲方申請并通過批準。
圖1測區范圍示意圖
根據項目需求,要求真實景三維模型成果要能滿足1:1000數字線劃圖(DLG)生產需要,平面中誤差±0.25m,高程中誤差±0.17m,最大允許誤差不超過2倍中誤差。測量基準采用國家2000坐標系統,1985國家高程基準,控制測量基礎資料由甲方提供。工程中RTK數據采集統一使用吉林省CORS網系統作為差分源。
1.2項目執飛無人機情況
參與項目航測飛行的飛行平臺是深圳飛馬機器人公司生產的F300智能航測遙感系統。該無人機機長1.07米,翼展1.8米,支持RTK/PPK差分模式,續航時間最長可達90分鐘,巡航速度60KM/H,能在5級風的情況下正常作業,且無遙控器,手拋起飛,自動滑降或者傘降的降落方式,對飛手要求低,EP0加碳纖復合材料易修復。無人機這些特點,讓此款無人機能經得住測繪工程項目繁忙的飛行需求,且在輕微損壞的情況下能夠快速修復而繼續飛行,不會耽誤緊張的測繪工期。
圖2 飛馬F300智能航測遙感系統及傾斜相機
飛馬F300掛載的傾斜相機如上圖右上角,是兩鏡頭傾斜相機。此傾斜相機的單個鏡頭采用APS-C(23.2×15.4mm)畫幅,2010萬像素,索尼QX1相機和索尼20mm焦距鏡頭。兩個鏡頭布置方式是一個鏡頭向左傾斜,一個鏡頭向后傾斜,有效像素為5456×3632。此傾斜相機,需無人機以往返飛的方式來獲取足夠多角度的原始影像數據。
二、工程項目實施
2.1、項目生產工藝流程
無人機傾斜攝影測量技術是新興航測技術方法,各種具體的執行標準尚不完善,為了更好的完成工程項目,根據技術設計文件以及相關資料,制定了項目工程生產工藝流程,項目的執行嚴格按照工藝流程的要求來施測。工藝流程如下圖所示:

圖3、生產工藝流程圖
2.2、項目外業實施
2.2.1、像控點布設及測量
依據甲方提供的項目基礎資料和項目要求,并參照奧維互動地圖,在室內根據踏勘的信息資料,按照10000到20000像素一個像控點[2],并考慮實際布點可行性,做像控點位置分布的預設。像控點的布置,我們采用L型的圖案,此圖案在實際工作中最容易噴涂,需要的輔助工具最少,同時邊上噴上點號,方便后期處理使用,甚至可以不參考點之記信息就能完成刺點。簡單易行的像控點布置,在能保證像控點質量的前提下,可以盡可能的提高外業工作效率。在測量像控點的同時,進行點之記信息的記錄。像控點的測量采用控制點測量的方式進行平滑采集。
圖4像控點設計分布圖
圖5 像控點布設與測量
2.2.2、外業航飛的實施
外業航飛對后期數據處理來說,是很關鍵的一環。好的航線設計,是外業飛行數據高質量的關鍵之一。按照相關技術資料和要求,在飛馬智航線軟件里,導入測區kml格式范圍線,進行飛行航線的規劃和飛行參數的設置。
項目航線主要設計參數如下:
相機型號:ILCE-QX1
地面分辨率:5.0cm
航向/旁向重疊度:80%
航線角度:80度
相對航高、航線間隔、拍照間隔等數據,智航線軟件會自動給計算出來。這也是飛馬無人機管家軟件設計比較人性化的表現之一。
圖6 航線規劃圖
按此航線規劃方案,在今年6月初,項目無人機作業組完成了長嶺縣城傾斜攝影測量的航攝工作。航測外業執飛無人機是飛馬F300智能航測系統掛載兩鏡頭傾斜相機,采用往返飛的方式飛行。由于天氣原因,外業實際用時4天,共計飛行14架次,獲得外業原始影像27972張,相應的靜態數據文件和觀測記錄表格,飛機日志數據文件,每一架次飛行情況記錄等資料。
圖7 外業飛行現場
2.2.3、外業航飛數據的預處理
航飛數據的預處理是完成高精度POS數據的融合解算。在飛馬無人機管家軟件智理圖模塊中,分步驟完成基站靜態數據格式轉換,機載GPS數據轉換,數據完整性檢查,GPS數據解算。解算完成后輸出txt格式的解算結果,在解算結果文件的第一行有Q1值用來評定此次解算結果的精度,一般要求在98以上[3]。然后對照片和POS數據進行整理,并按計算機處理能力,對測區進行處理分區的劃分。
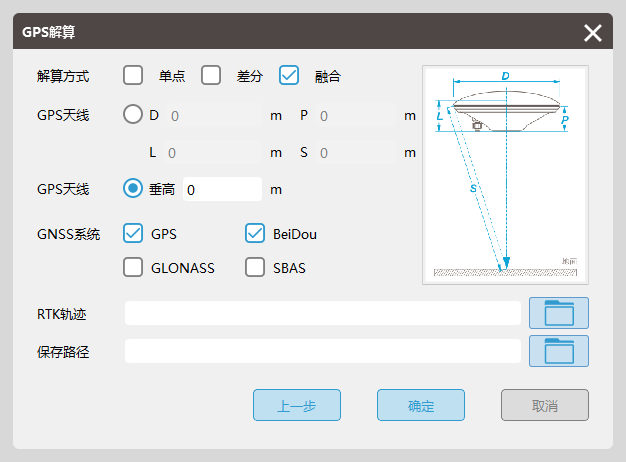
圖8 GPS數據融合解算
三、數據處理及實景三維模型生產
3.1、影像數據空三計算
本項目采用的建模軟件是Context Capture軟件,此軟件自動化程度高,操作步驟較少,能支持集群運算,是業內知名的自動化三維建模軟件。在軟件里新建工程,添加照片和POS數據,按默認參數提交空三計算,軟件會自動完成空三計算。如果結果不合格,就在計算結果基礎上修改空三計算參數并再次提交空三,直到空三合格為止。空三計算通過后,加入像控點坐標數據,并進行相片刺點,這時候軟件能預計出像控點在相片上的位置了,且準確度很高,能提高刺點的速度。刺點完成后,再次提交空三計算,完成后檢查空三報告質量,如果合格,就可以進行模型重建生產了。在控制點編輯器里有三個參數,分別是三維精度、三維水平精度和三維垂直精度,這三個精度參數,基本上能體現出最終模型數據的精度水平等級。

圖9 像控點三維精度水平計算結果
圖10帶像控點的空三成果3D視圖
3.2、三維模型的重建
空三成果合格后,下一步就進入模型重建生產了。選擇項目需要的坐標系,并從KML文件導入重建范圍(即測區范圍),設置好切塊方式和瓦片大小,就可以提交模型重建生產,真正開始生產模型。Context Capture軟件模型重建支持的數據格式很多,本項目采用OSGB格式。OSGB數據格式通用性比較好,支持的軟件也比較多。
圖11模型重建參數和瓦片分塊
模型重建生產是比較耗時間的,重建速度主要取決于計算機的整體計算速度。此項目采用5臺電腦,耗時將近5天才把模型全部生產完畢。
圖12 模型成果截圖
圖13 模型成果局部截圖
3.3、模型成果精度檢查
測繪產品精度是測繪工程項目的核心目標,實景三維模型成果已經生產完畢,對成果精度的檢核就是必須的要做的事情。我們聯合甲方一起對模型進行了一個精度的檢查,用RTK設備在測區測量了400個檢查點,最終選擇了399個平面檢查點和375個高程檢查點,對模型精度進行了檢查。檢查結果統計情況如下表所示:
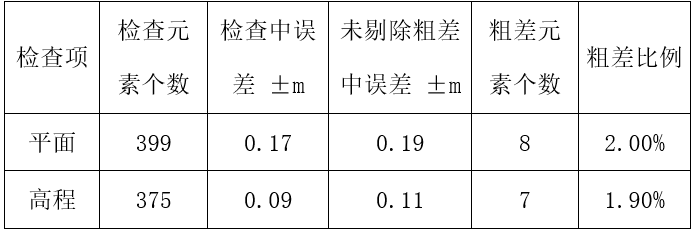
表1 模型精度檢查統計表
由上表統計數據來看,該工程項目的成果精度完全達到了項目設計要求,甚至比設計的精度還高出一點。這些數據表明,使用飛馬F300智能航測/遙感系統搭載傾斜相機的方案,采用合理的作業工藝流程,是完全可以滿足大比例尺測圖精度要求的。最終采用的檢查點分布情況如下圖所示:
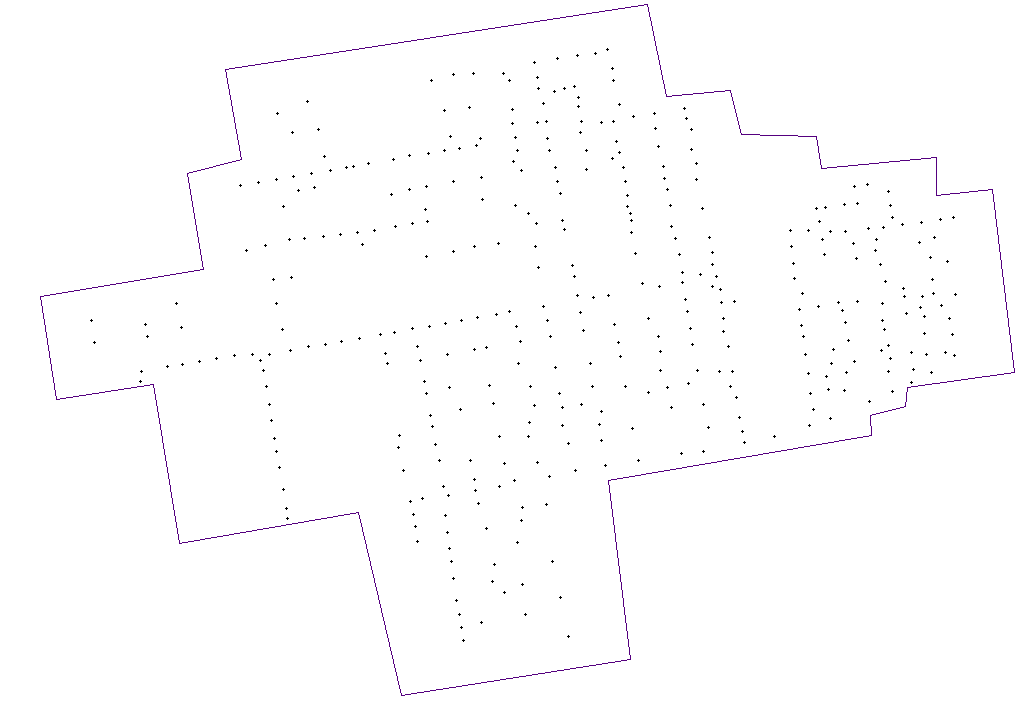
圖14 模型精度檢查點位置分布略圖
四、總結和展望
此工程項目的外業投入人員是踏勘2人一天,像控點2人一天,外業飛行2人4天,內業處理共計1人7天,其中人工操作約1天,其它時間是計算機自動完成計算。計算下來,采用飛馬F300搭載傾斜相機的方案,效率是傳統測繪方式的10倍甚至更高。
傾斜攝影測量近年來發展迅猛,逐漸成為測量人員很好的測量技術;在保證精度的前提下還能大大的提高測繪的作業效率;降低外業測繪作業人員的勞動強度,也使外業測繪人員的人身安全有了更好的保障;傳統測繪不易到達的地方也能測的到,讓測繪幾乎沒有死角;且提供的測繪成果表現形式更容易讓普通大眾看得懂、理解到位,相當于把現實城市搬回了家。這些優勢都是傳統的人工測繪所不具備的。在實景三維模型上進行線劃圖的采集和建庫,也是傾斜攝影測量數據成果的一個主要應用方向。業主方已經在此項目成果上采集完成測區1000比例尺的線劃圖。
圖15 基于模型成果采集的局部線劃圖成果
未來隨著5G通信技術的逐漸應用和普及,使實景三維模型數據的在線瀏覽和應用成為可能,就能為普通大眾提供更好地圖服務,比街景數據更加真實,而且可以360度的旋轉查看;也能為政府相關管理部門提供基于真實景的基礎平臺應用,再加上更多的各種物聯網和傳感器數據,讓城市的管理和服務水平上一個臺階。
總之,飛馬F300智能航測遙感系統,經受住了此項目的實際檢驗,能滿足大比例尺實景三維模型數據的采集和生產需要。飛馬F300智能航測遙感系統一定能成為廣大測繪從業者愛不釋手的測量工具,能為地理信息行業的興旺發展提供一定的助力。
-
數據采集
+關注
關注
39文章
6255瀏覽量
114053 -
無人機
+關注
關注
230文章
10515瀏覽量
182429 -
三維模型
+關注
關注
0文章
52瀏覽量
13153
原文標題:飛馬F300在大面積實景三維模型生產中的應用
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
高溫大面積碳化硅外延生長裝置及處理方法
三維測量在醫療領域的應用
三維測量技術在工業中的應用
南方智能SmartGIS Inspec實景三維質檢軟件介紹
三維掃描與建模的區別 三維掃描在工業中的應用
三維激光掃描儀應用領域 三維激光掃描儀與傳統測量工具比較
商湯科技運用AI大模型實現實景三維重建
南方智能推出三維地理實體生產軟件
泰來三維|三維掃描技術在虛擬博物館建設中的應用
泰來三維 工廠三維掃描建模技術服務

泰來三維 三維激光掃描結合BIM在工廠掃描建模中的優勢

泰來三維| 三維掃描在汽車工廠生產改造中的應用
泰來三維|文物三維掃描,文物三維模型怎樣制作






 工商網監
工商網監
評論