") 深度分析無掃描激光三維成像雷達研究進展及趨勢
深度分析無掃描激光三維成像雷達研究進展及趨勢

1 引言
激光雷達廣泛應(yīng)用于航天、測繪、軍事、民用等各個領(lǐng)域,其中三維成像激光雷達技術(shù)作為一種新型的成像技術(shù),在20世紀90年代末就已提出,目前正處于快速發(fā)展階段。三維成像激光雷達技術(shù)具有成像精度高、探測距離遠、三維圖像獲取速度快等優(yōu)點,在地形測繪、城市建模、公路檢測等民用領(lǐng)域具有廣泛應(yīng)用;在武器制導(dǎo)、戰(zhàn)場偵察、水下探測等軍事方面具有重要作用;在空間交會對接、天體表面精準著陸、航天器在軌服務(wù)等航天領(lǐng)域發(fā)揮關(guān)鍵作用。
激光三維成像雷達按工作方式可分為掃描和無掃描兩種體制。其中無掃描式激光三維成像雷達能對動態(tài)目標(biāo)進行無失真成像,具有成像速度快、高幀頻、高分辨率等優(yōu)點,同時克服了掃描式體積大,質(zhì)量重,可靠性差的缺點,在實時性和體積要求較高的空間目標(biāo)相對導(dǎo)航應(yīng)用中起著至關(guān)重要的作用,目前已成為許多國家研究的重點和熱點。發(fā)展至今,無掃描激光三維成像激光種類繁多,發(fā)展現(xiàn)狀不一。本文整理了閃光式、光子計數(shù)、增益調(diào)制型等7種無掃描激光三維成像雷達體制和距離選通成像技術(shù)國內(nèi)外相關(guān)研究工作,追蹤并歸納了其研究進展,并從核心器件角度分析其技術(shù)特點和發(fā)展趨勢,以明確其未來可能的發(fā)展方向。
2 國內(nèi)外研究進展
激光三維成像的本質(zhì)是并行激光測距,按照測距方式可分為直接法和間接法。直接法測距的技術(shù)特點是利用面陣探測器直接測量每個像素點激光發(fā)射信號與回波信號的時間差,從而獲得目標(biāo)的距離像;間接法測距技術(shù)是將時間信息轉(zhuǎn)換為可探測的物理信息如光強、振幅、頻率、相位、偏振態(tài)、圖像位置等,經(jīng)過數(shù)據(jù)收集和逆轉(zhuǎn)換處理,得到目標(biāo)的距離信息。距離選通成像技術(shù)的實質(zhì)是將對目標(biāo)的空間掃描轉(zhuǎn)換為時域掃描,適用于不同體制的激光三維成像雷達系統(tǒng),是一種通用技術(shù),總體分類如圖1所示。
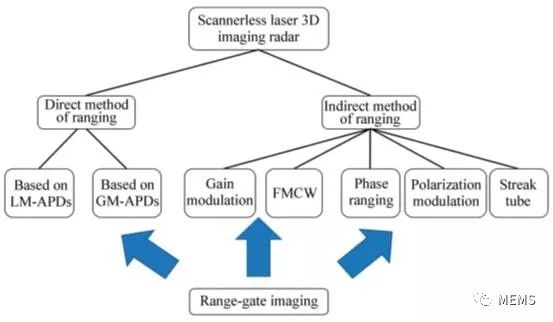
圖1 無掃描激光三維成像雷達分類
2.1 基于LM-APDs陣列閃光激光雷達
2.1.1 工作原理
基于LM-APDs陣列的閃光激光雷達是典型的無掃描三維成像激光雷達。系統(tǒng)發(fā)射一個或多個脈沖激光,通過閃光成像的方式,獲得目標(biāo)的三維圖像。脈沖發(fā)射后,同時觸發(fā)時間測量電路,當(dāng)回波光信號到達接收端后停止計時,便獲得了脈沖飛行時間(Time of Flight,ToF)。其中時間測量可有距離計數(shù)器、高速A/D采樣、利用激光器充電的時間幅度變換等多種方案。最大測量距離主要受激光脈沖峰值功率影響,測距精度受脈沖上升時間影響,最小測量距離受脈沖的半功率寬度影響。
2.1.2 國內(nèi)外研究現(xiàn)狀
1996年,美國空軍研究實驗室(Air Force Research Laboratory,AFRL)開展“閃光三維成像激光雷達”項目,并與雷神公司(Raytheon Company,RC)、先進科學(xué)概念公司(Advanced Scientific Concepts,ASC)合作研究。2009年,ASC公司生產(chǎn)的一款名為“龍眼”的三維成像激光雷達,采用128 x 128 InGaAs LM-APDs焦平面陣列,成像幀率為30 Hz,4 km遠處測距精度為60 cm,利用該激光雷達完成了交會對接等空間任務(wù)。2011年,NASA開展了減輕獵戶座相對導(dǎo)航風(fēng)險用的傳感器測試任務(wù),ASC公司的閃光激光雷達在距離規(guī)定外成功追蹤到目標(biāo)。
該激光雷達的核心器件是LM-APDs焦平面陣列,由APD陣列和集成在上面的讀出電路構(gòu)成。APD陣列決定了系統(tǒng)的探測性能,讀出電路決定了系統(tǒng)的信號處理能力。
2013年,George M. Williams團隊對InGaAs LM-APD進行研究,其結(jié)構(gòu)如圖2所示。面積為30 um2的像素在273 K下,暗電流為0.2 nA,線性增益為20,量子效率為80%,電離系數(shù)比例k=0.2時的過量噪聲因子F=5.56。當(dāng)采用多層In-GaAs吸收層的結(jié)構(gòu),過剩噪聲降低,工作增益能達到M=1000左右,但多層結(jié)構(gòu)技術(shù)尚不成熟。
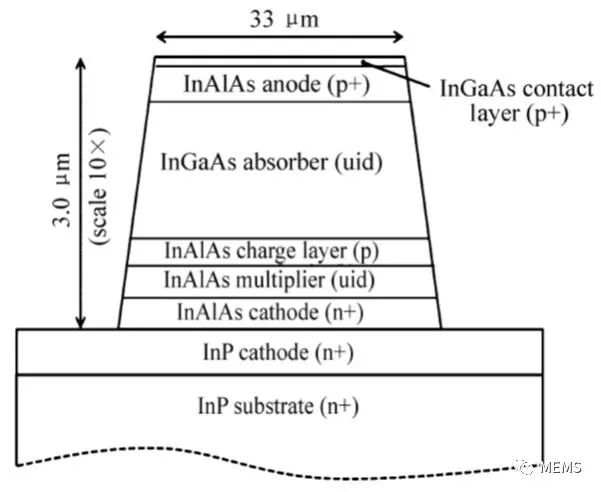
圖2 InGaAs LM-APD結(jié)構(gòu)圖
目前技術(shù)較為成熟的是HgCdTe LMAPDs,其結(jié)構(gòu)如圖3所示。雷神公司于2011年研制出了256 x 256的HgCdTe LM-APDs陣列,1550 nm波長的響應(yīng)度為15 A/W,在300 K工作溫度下,增益可達到100以上,讀出噪聲較小,動態(tài)范圍為12 bits,幀速能達到30 Hz,有效克服了探測器陣列光學(xué)串話問題,同時有效抑制了讀出電路單元間的串?dāng)_。但實測增益與理論值相差較大,原因在于工作溫度過高,導(dǎo)致器件性能降低。因此該器件面臨的技術(shù)問題是需要實時采取制冷措施來保證高增益的性能。
2012年,法國CEA-LETI與以色列的Sofradir公司合作,基于HgCdTe的LMAPDs研制了一種像素規(guī)模為320 x 256的探測器,經(jīng)過測試,在30 m距離處的測距精度優(yōu)于11 cm。
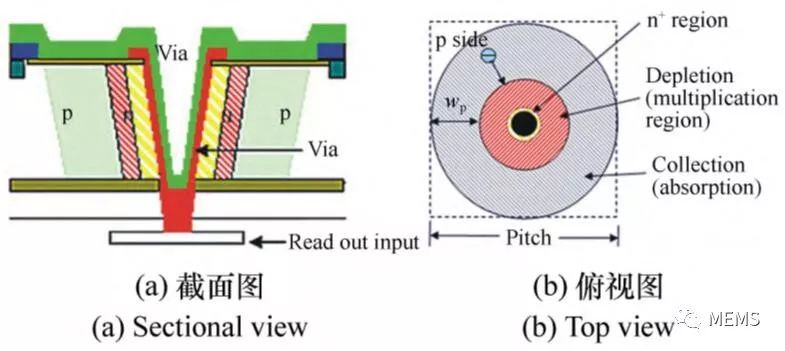
圖3 美國DRS公司生產(chǎn)的HgCdTe LM-APDs截面圖和俯視圖
2016年,Ball Aerospace公司為了滿足NASA提出的空間任務(wù)要求,采用了具有更高像素的256 x 256 CMOS InGaAs PIN作為探測器,系統(tǒng)的功耗降低了1/4,尺寸減小了29%,但缺點是PIN管的靈敏度不高,作用距離受到限制。
國內(nèi),2011年,東南大學(xué)設(shè)計了LM-APD主/被動紅外成像讀出電路,陣列的驗證規(guī)模為64 x 64。2013年,重慶光電技術(shù)研究所設(shè)計并分析了64 x 64 AlGaN APD焦平面陣列的讀出電路,利用等效電路模型推導(dǎo)得到積分電容為70 fF,放大增益可達到300。2014年,中國科學(xué)院上海技術(shù)物理研究所設(shè)計了一種用于門控激光成像雷達的制冷型數(shù)字化混成式HgCdTe LMAPD焦平面陣列的讀出電路,其正常工作溫度為77 K,陣列規(guī)模128 x 128。
2.2 光子計數(shù)激光三維成像雷達
2.2.1 工作原理
基于GM-APDs陣列的閃光激光雷達利用GM-APDs單光子計數(shù)的特性進行探測,因此又稱為光子計數(shù)激光三維成像雷達,與基于LM-APDs陣列的區(qū)別在于是對脈沖飛行時間進行統(tǒng)計測量。其原理框圖如圖4所示。
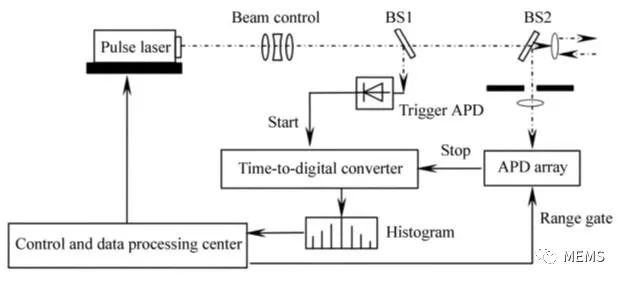
圖4 光子計數(shù)三維成像激光雷達原理框圖
利用質(zhì)心算法可以得到目標(biāo)距離的準確值:
將脈寬τbin劃分為i個很短的時間片,每段時間長為τ(i),Sp(i)為每個時間片內(nèi)的回波光子數(shù),Sp為目標(biāo)反射回來的平均光子數(shù),c為光速,R為目標(biāo)距離。
2.2.2 國內(nèi)外研究現(xiàn)狀
2014年,美國Princeton Lightwave公司對規(guī)格為32 x 32和128 x 32的InGaAs GM-APD進行研究,其結(jié)構(gòu)如圖5所示。探測單元直徑18 um,單光子響應(yīng)率32.5%,使用更寬帶隙的InGaAs作為吸收層后,暗電計數(shù)率在253 K溫度下為5 kHz,時間抖動大約為500 ps,抖動誤差主要來自于讀出集成電路。2012年,美國雷神(Raytheon)公司研制了基于HgCdTe GM-APDs探測器的成像激光雷達,目前可做到256 x 256規(guī)格的陣列,主要應(yīng)用于航天器導(dǎo)航和登月飛行器自主著陸。
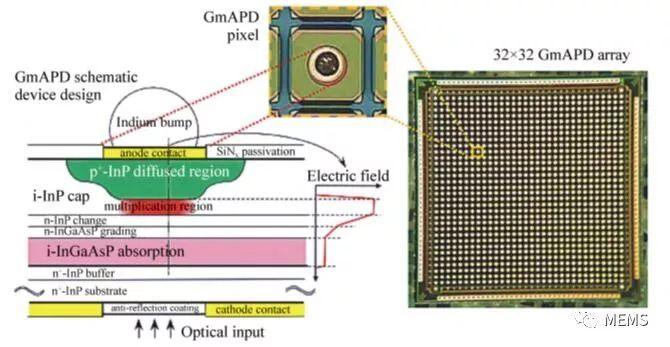
圖5 32 x 32 InGaAs GM-APD結(jié)構(gòu)圖
國內(nèi)基于GM-APDs探測器的光子計數(shù)激光雷達研究起步較晚,探測器的發(fā)展水平較低。目前中國電子科技集團公司第四十四研究所研制出了規(guī)格為32 x 32的InGaAs GM-APD探測器陣列,哈爾濱工業(yè)大學(xué)利用該器件搭建了激光成像系統(tǒng)并對720 m和1.1 km處的建筑進行成像,獲得了目標(biāo)表面結(jié)構(gòu)的距離像,但并未給出測距精度,成像效果并不理想。
2.3 增益調(diào)制型成像激光雷達
2.3.1 工作原理
增益調(diào)制測距原理是通過測量脈沖的飛行時間和調(diào)制增益的函數(shù)關(guān)系計算出待測目標(biāo)的距離值。該體制需要結(jié)合未經(jīng)調(diào)制和調(diào)制后的圖像信息來得到目標(biāo)的三維圖像。目前有兩種實現(xiàn)方法:一是采用單個ICCD進行兩次探測,兩次探測之間存在時間差,嚴重影響成像速度;二是采用雙通道ICCD進行一次探測,分別對兩個ICCD進行不同增益調(diào)制,系統(tǒng)結(jié)構(gòu)框圖如圖6所示。增益調(diào)制函數(shù)已知,通過測得雙通道接收的光功率,可解算出脈沖飛行時間,從而可以獲得目標(biāo)的距離信息。
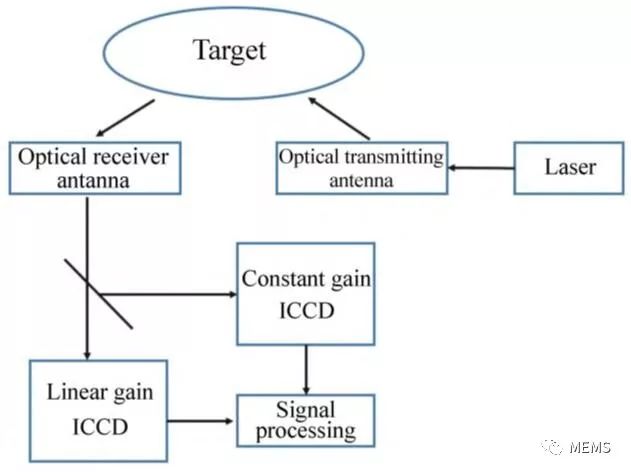
圖6 雙通道單增-恒定增益調(diào)制成像激光雷達工作原理圖
2.3.2 國內(nèi)外研究現(xiàn)狀
2004年,日本NHK工程服務(wù)部的Masahiro Kawakita等人提出了一種基于增益調(diào)制實時測距方法,用增益調(diào)制技術(shù)代替了光源強度調(diào)制,采用單增-單減的增益模式,在1 m距離上成像精度達到毫米量級。
國內(nèi)對增益調(diào)制型激光雷達研究較多。2009年,哈爾濱工業(yè)大學(xué)靳辰飛團隊提出了通過高壓調(diào)制ICCD增益進行測距的方法。研究發(fā)現(xiàn),指數(shù)函數(shù)調(diào)制下,測距精度不受相對距離影響,測距精度在0.17~1.19 m范圍內(nèi)波動。隨后該團隊采用雙通道ICCD進行接收,獲得較好的測距精度和成像效果。2016年,屠志鵬等人采用更接近實際的非線性增益進行調(diào)制,分析了成像準確度,對距離60 m處的目標(biāo)進行成像,如圖7所示,獲得了距離圖像,距離準確度為分米量級。
圖7 實驗場景圖和目標(biāo)距離圖像
2008年,浙江大學(xué)嚴慧民團隊提出了基于線性-恒定增益調(diào)制模式的成像激光雷達。2013年,該團隊分析了復(fù)合目標(biāo)對測距影響,并采用單通道線性-恒定增益模式對學(xué)校圖書館進行探測,成像效果如圖8所示,在380 m處的測距精度為0.4 m,同時指出了采用指數(shù)增益調(diào)制方式存在一定測距限制。
圖8 浙大圖書館的距離灰度圖
2.4 調(diào)頻連續(xù)波三維成像激光雷達
2.4.1 工作原理
調(diào)頻連續(xù)波(Frequency Modulated Continue Wave,F(xiàn)MCW)測距原理是將時間的測量轉(zhuǎn)換為與其對應(yīng)成比例的差頻頻率的測量。其中采用線性調(diào)制、非相干探測的方式利于無掃描三維成像應(yīng)用。這里以鋸齒波為例進行介紹。
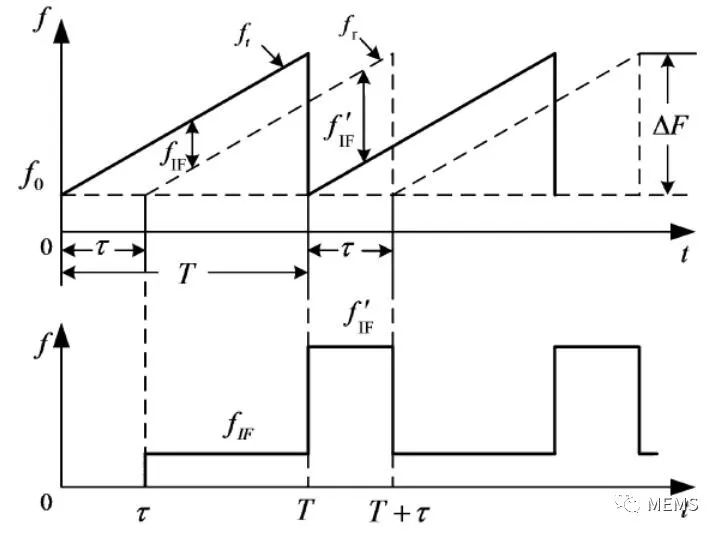
圖9 鋸齒波調(diào)制測距原理圖
已知鋸齒波調(diào)制函數(shù),本振信號與回波信號混頻后,濾去高次諧波分量得到中頻信號,則目標(biāo)距離的表達式為:

式中,ΔF為調(diào)制帶寬,T為調(diào)制周期,fIF為中頻頻率。
FMCW三維成像激光雷達由發(fā)射子系統(tǒng)、接收子系統(tǒng)和信號處理子系統(tǒng)構(gòu)成,其系統(tǒng)框圖如圖10所示。
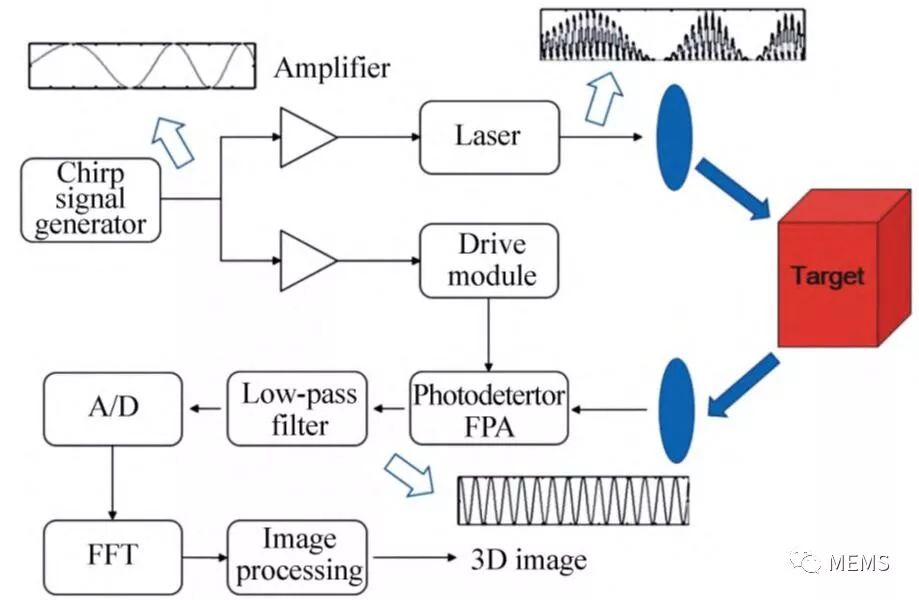
圖10 FMCW三維成像激光雷達系統(tǒng)原理框圖
2.4.2 國內(nèi)外研究現(xiàn)狀
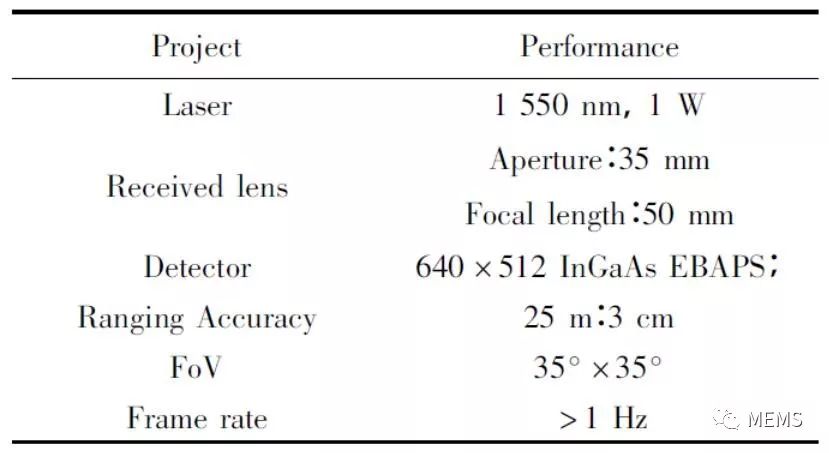
1996年,美國陸軍實驗室(Army Research Laboratory,ARL)提出“FMCW三維成像激光雷達”,單點測距在10 m處精度能達到0.25 mm。2007年,該機構(gòu)研制出了FOPEN三維成像激光雷達樣機,其主要性能參數(shù)如表1所示。
表1 FOPEN三維成像激光雷達性能參數(shù)
2000年,ARL對對ICCD、量子阱電光調(diào)制器(Quantum-Well Electro-Optics,QWEO)、電壓調(diào)制光電器件(Voltage-Modulated Optical Detector,VMOD)、金屬半導(dǎo)體金屬探測器(Metal-Semiconductor-Metal,MSM)和電子轟擊有源像素傳感器(Electron Bombarded Active Pixel Sensor,EBAPS)光電混頻接收性能進行研究。2006年,ARL利用美國Intevac公司生產(chǎn)的EBAPS搭建實驗系統(tǒng),采用像素捆綁技術(shù),降低分辨率來提高成像幀速,對距離為35 m處的悍馬軍車進行成像,空間分辨率為128 x 128,成像幀速能達到37 fps。同年,ARL根據(jù)光子計數(shù)測距原理提出了基于GM-APDs完成測距的方案,設(shè)計了基于電混頻和光電混頻兩種解調(diào)模式的系統(tǒng),并進行了仿真分析。圖11表示光電混頻的測距系統(tǒng)框圖。由于當(dāng)時GM-APD處于研發(fā)階段,因此ARL并未開展成像實驗。國內(nèi)對該體制的研究工作主要集中在信號處理和算法方面。2011年,哈爾濱工業(yè)大學(xué)張子靜等人沿著ARL思路,以GM-APD為接收端探測器進行了理論研究和仿真分析,采用不同的算法提取遮蔽目標(biāo)信息,2013年,又基于GM-APD探測器提出了一種預(yù)混頻的方法,提高了系統(tǒng)的信號帶寬,并且消除了探測器死區(qū)時間的影響。2014年,航天工程大學(xué)杜小平團隊針對相對運動和信息延遲造成的偏差提出了基于偏差抵消原理的距離和速度信息提取方法。
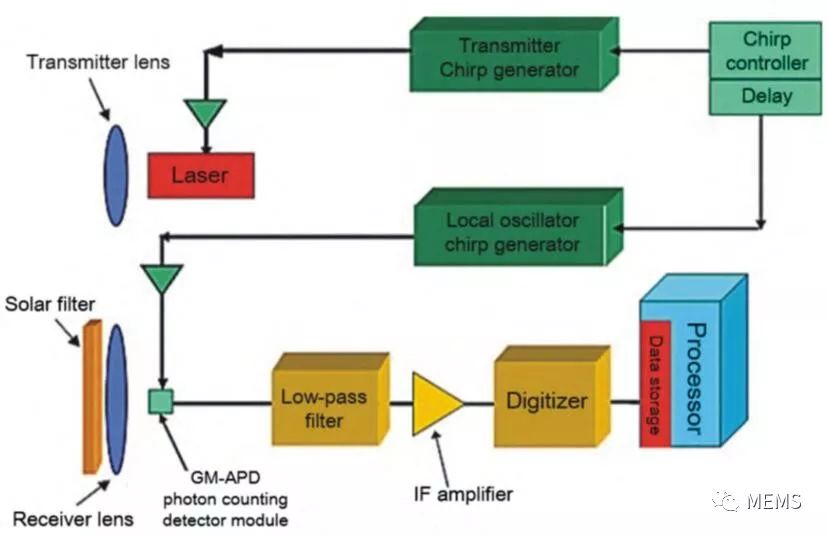
圖11 基于GM-APD的FMCW激光雷達測距系統(tǒng)原理框圖
我國微光技術(shù)起步較晚,像增強器主要通過引進仿制,價格昂貴。國外已經(jīng)研制出高性能四代像增強管,我國已經(jīng)研制出了第三代IIT的樣品,其光電陰極靈敏度基本達到國外水準,技術(shù)瓶頸在于中繼元件耦合問題,器件的穩(wěn)定性和可靠性方面不足。QWEO的量子阱結(jié)構(gòu)生長較為復(fù)雜,技術(shù)難度高,目前國際上只有西方少數(shù)國家能夠?qū)崿F(xiàn)大面陣器件。
2011年,西安光機所根據(jù)ARL提出的理論研制出了響應(yīng)度較高的32 x 32 GaAs MSM陣列芯片,但暗電流更大,穩(wěn)定性差,有待進一步優(yōu)化。國內(nèi)宋德博士等人正在開展對P型基底均勻摻雜條件下EBAPS電荷收集效率的模擬研究,處于理論研究和模擬仿真階段,未見其產(chǎn)品的相關(guān)報道。對于GM-APDs陣列,國內(nèi)資料顯示目前中國電子科技集團公司第四十四研究所研制出了32 x 32的InGaAs GM-APD探測器陣列,其性能與國外差距較大。其他研究團隊目前開展理論研究和仿真分析,還未研制出相關(guān)樣品。
2.5 鑒相式三維成像激光雷達
2.5.1 工作原理
該體制測距原理與FMCW相似,區(qū)別在于將差頻頻率的測量轉(zhuǎn)變?yōu)橄辔徊畹臏y量。其原理框圖如圖12所示。
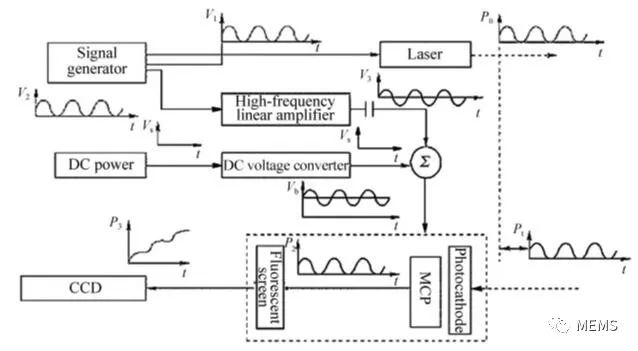
圖12 基于ICCD的鑒相式激光測距原理框圖
調(diào)制信號對激光功率和微通道板同時調(diào)制,CCD的積分時間為信號周期的整數(shù)倍并得到一個測量值。微通道板未經(jīng)調(diào)制下,CCD在同樣條件下積分得到另一測量值,兩者的比值為Cp:

式中,m0為激光功率調(diào)制系數(shù),m為微通道板增益調(diào)制度,可解算出相差φ。再根據(jù)相位差與距離的關(guān)系式可解算出目標(biāo)距離。
2.5.2 國內(nèi)外研究現(xiàn)狀
1993年,美國桑迪亞國家實驗室(Sandia National Laboratories,SNL)提出了“鑒相式三維成像激光雷達”。2003年,SNL提出了“分光器+光纖耦合”技術(shù)來解決運動目標(biāo)成像失真的問題,但以犧牲測距精度為代價。
2005年,SNL研制出了“激光動態(tài)距離成像儀”(Laser Dynamic Range Imager,LDRI),距離在1.5~3.0 m時測距精度為6.4 mm,視場角18°x 13°,幀速為30 Hz,平均功耗為17 W。圖13是利用LDRI激光雷達對空間站表面填充材料成的三維圖像。
圖13 LDRI對空間站表面成的3D圖像
國內(nèi),2007年,浙江大學(xué)對鑒相式三維成像激光雷達進行研究,對四次成像法進行了理論推導(dǎo)和仿真分析,并開展了近距離成像實驗,基本能區(qū)分物體的相對位置關(guān)系。2011年,電子科技大學(xué)介紹了基于方波與方波相關(guān)法的測距方法,對測距原理進行仿真,對測距精度進行分析。由于鑒相式測距方法自身存在諸多技術(shù)短板,國內(nèi)對該體制并未展開進一步研究。
2.6 基于偏振調(diào)制的三維成像激光雷達
2.6.1 工作原理
基于偏振調(diào)制的三維成像激光雷達利用晶體的電光效應(yīng),改變反射光波的偏振態(tài),通過比較反射回波在兩個相互垂直的偏振方向上信號的差異來獲得時間信息,從而獲取目標(biāo)的距離值。其測距原理如圖14所示。根據(jù)兩個相機接收到的光學(xué)參量結(jié)合調(diào)制函數(shù)的表達式可以解算出時間信息,進而獲得目標(biāo)的距離信息。
圖14 偏振調(diào)制激光測距原理框圖
2.6.2 國內(nèi)外研究現(xiàn)狀
美國空軍成立的LIMARS項目提出一種基于偏振調(diào)制的三維成像激光雷達,該系統(tǒng)是采用兩個相機進行接收。美國國防部高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)和美國TETRAVUE公司將該技術(shù)成功實現(xiàn),DARPA分別對卡車和坦克進行三維成像,如圖15所示。
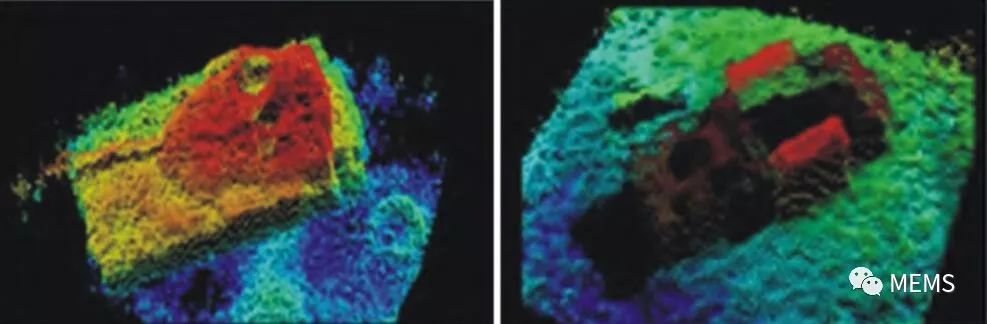
圖15 偏振激光三維成像圖
國內(nèi),2014年,航天工程大學(xué)開始對該體制相關(guān)理論進行深入研究,分析了兩種基于偏振調(diào)制的高分辨激光雷達系統(tǒng),經(jīng)過仿真分析,兩個系統(tǒng)具有相同的測距精度,能達毫米量級,其成像效果如圖16所示,使用偏振分光棱鏡和兩個CCD的系統(tǒng)具有更高圖像分辨率的優(yōu)勢。隨后,該團隊進一步研究了發(fā)射信號形態(tài)對測距精度的影響,對提高偏振調(diào)制激光三維成像雷達的測距精度有重要意義。
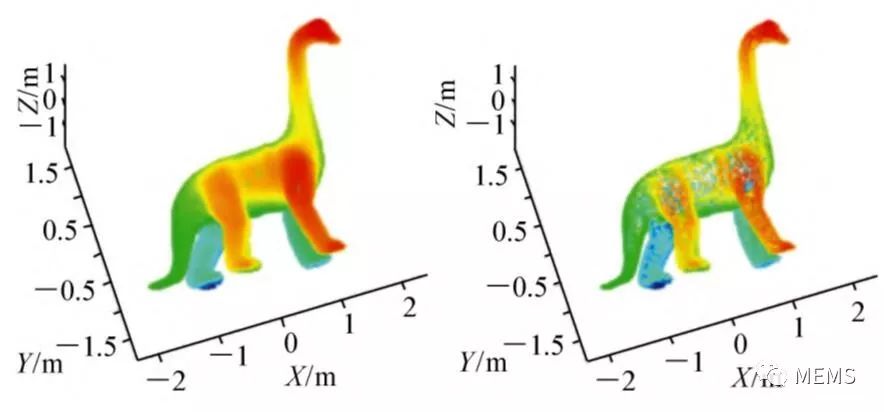
圖16 兩種偏振調(diào)制體制的成像效果對比圖
中國科學(xué)院光電技術(shù)研究所采用鋸齒波調(diào)制函數(shù)對1 km遠的建筑進行成像實驗,提出了適合于該體制的自適應(yīng)距離選通測距方法,并在后期的圖像配準算法上做出了改進,實驗結(jié)果如圖17所示。
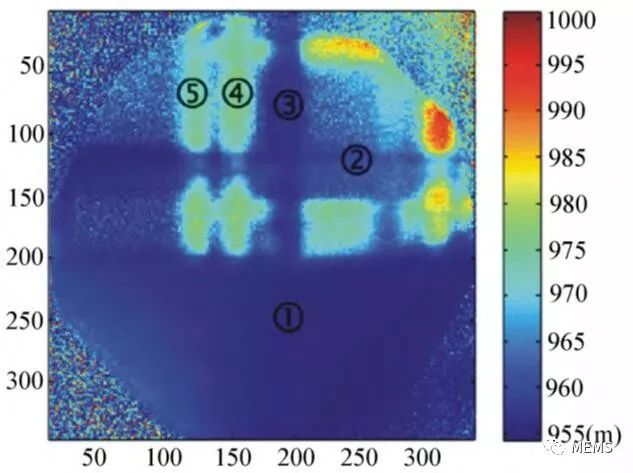
圖17 1 km處的建筑物距離圖
2.7 條紋管激光成像雷達
2.7.1 工作原理
條紋管激光成像雷達系統(tǒng)(Streak Tube Imaging Lidar,STIL)是將脈沖飛行時間轉(zhuǎn)換為熒光屏上條紋的相對距離。采用脈沖激光器,回光經(jīng)過光學(xué)天線聚焦到條紋管上,光電子在熒光屏上形成條紋像,由CCD采集。其成像原理如圖18所示,測距精度能達厘米量級。條紋管又可分為單縫和多縫。單縫是線性陣列探測器,需要一維掃描整個場景,多用于機載系統(tǒng);多縫更有利于無掃描三維成像,但缺點是成像面積少,精度較低。
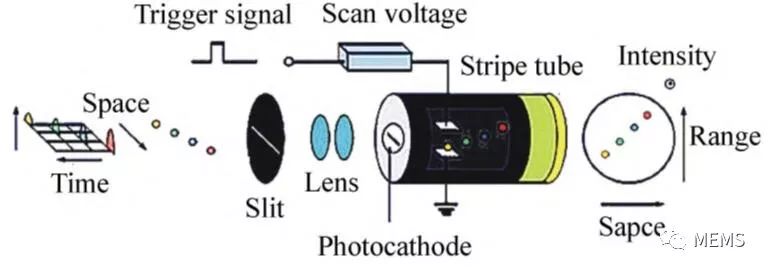
圖18 條紋管成像原理框圖
2.7.2 國內(nèi)外研究現(xiàn)狀
1989年,美國F. K. Knight提出了“條紋管探測器的閃光式激光雷達”的概念。隨后Arete Associates公司研發(fā)了64 x 64的多縫條紋激光三維成像雷達,圖19為其原理示意圖。
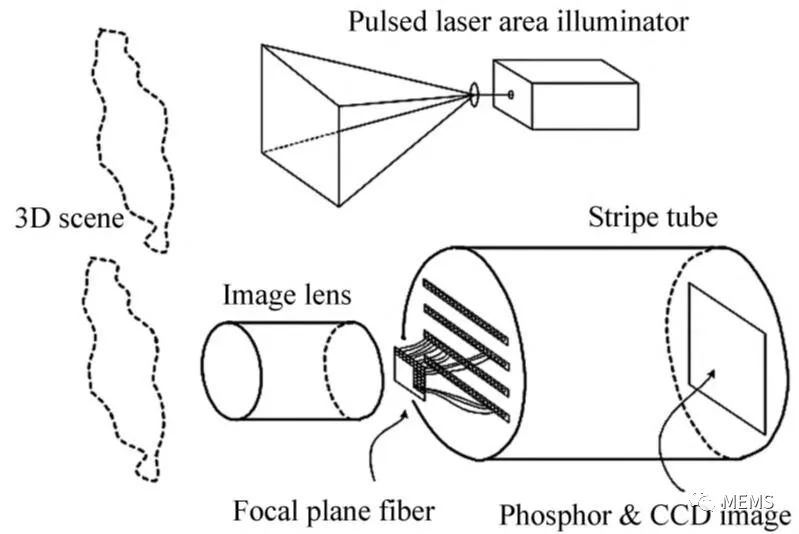
圖19 多縫條紋管激光雷達原理圖
隨后對地面建筑場景的進行三維成像,如圖20所示。該公司主要針對海面波和海上目標(biāo)探測開展相關(guān)研究。
圖20 條紋管激光雷達對地面場景三維成像圖
國內(nèi),2010年,哈爾濱工業(yè)大學(xué)將單縫STIL與偏振成像技術(shù)相結(jié)合,利用目標(biāo)不同的偏振特性,成功在雜亂的背景下識別目標(biāo),實驗結(jié)果如圖21所示。
2014年,哈爾濱工業(yè)大學(xué)搭建了單縫條紋管激光成像雷達系統(tǒng),分別在實驗條件(近距離不考慮信噪比條件下)、遠距離條件(4 km目標(biāo)成像)以及水下條件進行了系統(tǒng)分辨率測試,最近3 m處為0.02 m,最遠6 km處為1 m。
2016年,北京理工大學(xué)夏文澤博士等人提出了條紋管激光雷達的仿真模型,從測距方程、脈沖模型、系統(tǒng)噪聲等角度進行分析,為條紋管激光雷達的設(shè)計提供了更為系統(tǒng)的理論指導(dǎo)。
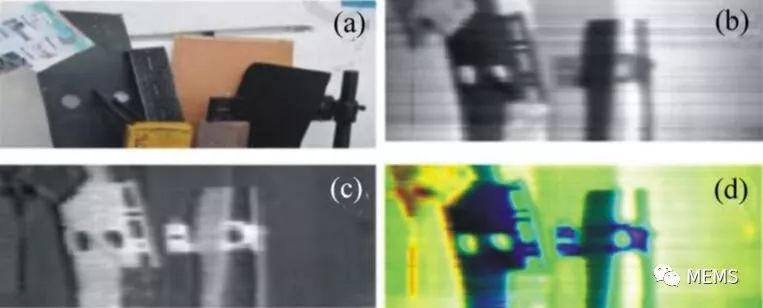
圖21 待測目標(biāo)的(a)實物圖、(b)強度像、(c)偏振像、(d)融合圖像
2.8 距離選通三維成像技術(shù)
2.8.1 技術(shù)原理
距離選通成像技術(shù)也叫時間門選通成像技術(shù),可以有效降低目標(biāo)后向散射,從而提高成像質(zhì)量,技術(shù)原理如圖22所示。選通門開啟時間決定成像距離,波門寬度決定成像的景深范圍。開啟時間越精確,測距精度就越高,波門寬度越窄,圖像效果就越好。一次選通成像獲得一幅二維圖像,調(diào)整選通門距離獲得多幅圖像,實現(xiàn)對目標(biāo)切片成像,最后通過圖像融合得到目標(biāo)三維圖像。選通成像技術(shù)是一種對特定距離目標(biāo)實現(xiàn)三維圖像還原重構(gòu)的成像手段,在不同體制的成像激光雷達中,探測器選通門的控制方式各不相同,但核心思想都是只對包含目標(biāo)距離范圍內(nèi)的回波信號進行接收。
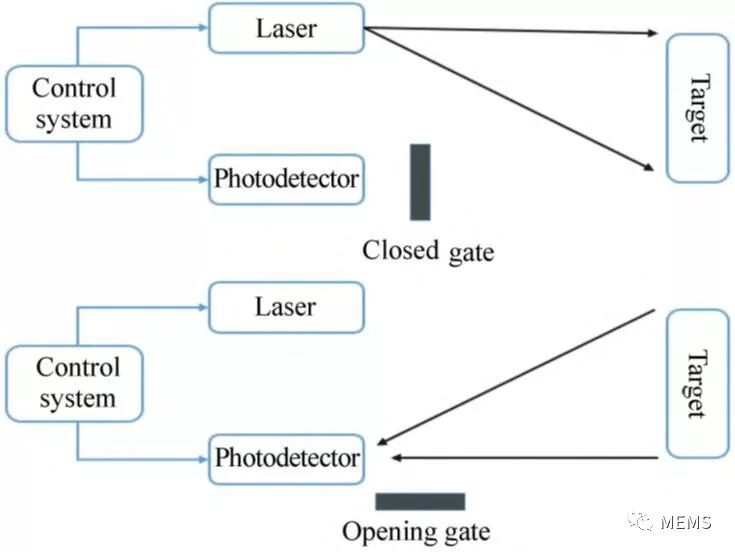
圖22 距離選通成像的原理圖
2.8.2 國內(nèi)外研究現(xiàn)狀
國外許多國家在該技術(shù)研究上取得顯著成就,例如美國、俄羅斯、法國、已經(jīng)研制出相關(guān)設(shè)備并投入實際應(yīng)用。目前國內(nèi)如航天工程大學(xué)、中國科學(xué)院半導(dǎo)體所等多家單位正在開展相關(guān)研究,取得了一定研究成果。
2016年,航天工程大學(xué)搭建了基于ICCD的距離選通實驗系統(tǒng),提出了一種基于像質(zhì)評價的互信息配準算法來匹配激光圖像目標(biāo)的空間位置,系統(tǒng)如圖23所示,實驗結(jié)果表明該方法有效配準激光圖像,大大降低了對運動目標(biāo)三維成像的難度。
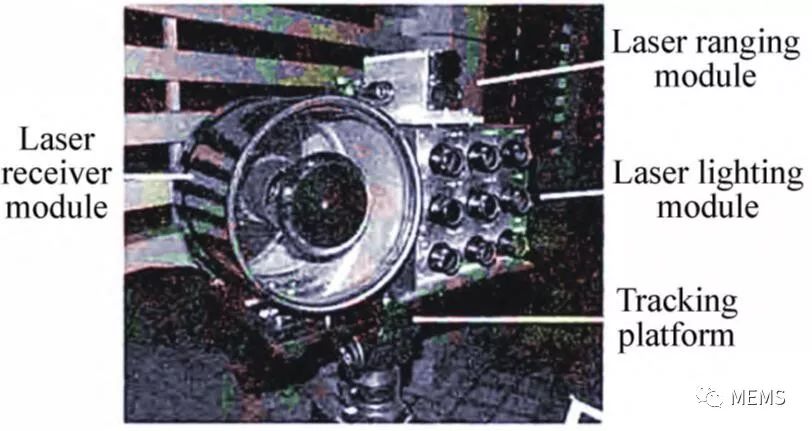
圖23 系統(tǒng)實物圖
2017年,華中科技大學(xué)提出了一種用于長距離水下線狀目標(biāo)檢測算法,通過對比度拉升、中值濾波、小波變換、Canny邊緣檢測算子、參數(shù)估計等處理,計算目標(biāo)位置信息,實驗結(jié)果表明,利用該算法檢測率可達93%,有效檢測距離增大。
3 技術(shù)優(yōu)劣對比和未來發(fā)展趨勢分析
3.1 不同體制成像激光雷達性能的比較
基于LM-APDs陣列的閃光激光雷達具有測距精度高、成像速度快、能對運動目標(biāo)無失真成像、抗環(huán)境干擾能力強等優(yōu)點。但也存在以下幾個問題:脈沖激光的峰值功率較高,在近距離探測時容易造成LM-APD探測單元飽和甚至損壞;高精度的時間測量對信號的采樣、信號傳輸和處理帶寬要求較高;目前LM-APDs陣列規(guī)格較小,限制了三維圖像的分辨率;探測器陣列集成度要求高、制作工藝復(fù)雜,器件成本高。
光子計數(shù)三維成像激光雷達具有單光子探測的特點,靈敏度極高,使用小功率激光器就能實現(xiàn)超遠距離成像,降低了對激光器功率和探測器口徑的要求,適合于對器件體積有較大限制的實際應(yīng)用;其輸出的是數(shù)字電平信號,不需要寬帶模擬處理電路;基于統(tǒng)計特性的圖像處理方法有效克服了環(huán)境等噪聲干擾,提高了信噪比。該成像體制同時存在以下問題:需要多次累計探測,增大了數(shù)據(jù)處理量,嚴重影響成像速度,對運動目標(biāo)成像存在失真問題;探測器靈敏度極高,使探測器容易飽和甚至損壞,大動態(tài)范圍成像效果較差;目前GM-APDs焦平面陣列與LM-APDs陣列存在同樣的問題,并且該器件抗人為干擾的能力較弱。
增益調(diào)制型成像激光雷達具有測距精度高,數(shù)據(jù)處理量小,距離解算方法簡單等優(yōu)點。目前該系統(tǒng)普遍采用ICCD接收,存在的問題是ICCD的驅(qū)動電壓近千伏,功耗大,中繼元件或光纖耦合降低了能量利用率和橫向分辨率。單通道和雙通道接收各有利弊,根據(jù)任務(wù)需求選擇不同模式,基于雙通道型只需一次探測,成像速度快,能對運動目標(biāo)無失真成像,但雙通道使用兩個相機,增加了系統(tǒng)體積和成本,不同相機由于靈敏度、噪聲特性等存在差異將影響測距精度等指標(biāo),需要進行像素配準處理,因此增加了數(shù)據(jù)處理量和系統(tǒng)的復(fù)雜性。單通道型不存在相機差異問題,但必須通過多次探測才能獲得圖像,成像實時性較差,只適用于靜止目標(biāo)的探測,限制其應(yīng)用范圍。
FMCW三維成像激光雷達將時間信息加載到頻率上,抗干擾能力強;中頻信號經(jīng)帶寬壓縮后僅為千赫茲,減輕了信號處理負擔(dān);理論上不存在測距盲區(qū)和距離模糊問題;連續(xù)波激光功率小,回波不易使探測器飽和;測距精度高,近距離時能到達毫米量級。該體制存在以下問題:需要對激光器進行超寬帶信號調(diào)制;光電混頻探測器目前處于技術(shù)瓶頸期,已有的器件成本較高,且存在技術(shù)短板;解算距離需要進行FFT運算,影響成像實時性。
鑒相式成像激光雷達測距精度高,信號處理簡單。采用連續(xù)波激光工作,不易造成探測器飽和或損壞,適用于近距離、高精度三維成像。該體制存在嚴重的距離模糊問題,需要通過不同調(diào)制頻率消除,增加了數(shù)據(jù)處理量,降低了成像速度,無法用于運動目標(biāo)的探測;同時系統(tǒng)的抗干擾能力較弱。
基于偏振調(diào)制的成像激光雷達對運動目標(biāo)探測無失真;兩個偏振方向的強度比值消除了目標(biāo)折射率對測距精度的影響;在對反射回波信號的處理中,只有一次“光-電”轉(zhuǎn)換,減小了信號衰減,提高了回波能量利用率。該系統(tǒng)存在以下問題:對于成像體制而言,必須通過兩幅圖像來消除目標(biāo)反射率的影響。對于中國科學(xué)院提出的方案而言,EMCCD自身在強背景光條件下所成的圖像存在拖尾效應(yīng);該體制也存在雙相機問題;KDP晶體的調(diào)制電壓近千伏,功耗較大,同時晶體視場角較小,成像效果易受入射光角度、工作溫度等影響。
條紋管激光成像雷達具有探測距離遠、距離分辨率高、大視場、成像速度快、抗干擾能力強的特點,并且條紋管技術(shù)比較成熟。該體制存在的問題是:整個系統(tǒng)存在多次光電轉(zhuǎn)換過程,能量損耗大,利用率低;條紋管體積較大,結(jié)構(gòu)復(fù)雜,驅(qū)動電壓近千伏,增加了系統(tǒng)功耗,內(nèi)部噪聲大,嚴重影響成像質(zhì)量;熒光屏上的條紋光強普遍較弱,同時存在中間強、邊緣暗的現(xiàn)象,易造成測距誤差。
距離選通激光三維成像技術(shù)的顯著優(yōu)點是有效克服大氣后向散射和背景干擾,增強系統(tǒng)環(huán)境適應(yīng)能力。該技術(shù)也存在短板:實際應(yīng)用中必須借助其他方式獲得先驗知識,才能進行選通成像;測量精度與時間切片的數(shù)量成正比,精度越高,切片數(shù)量越多,成像速度就越慢,不適合實時性較高的應(yīng)用場合。
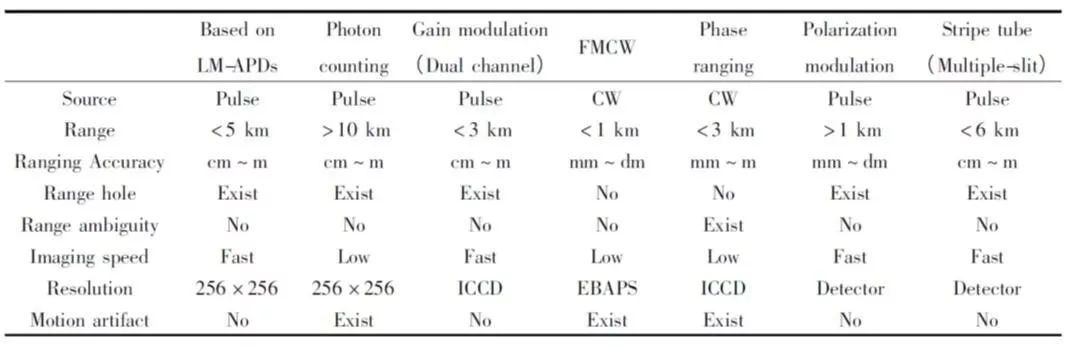
至此,本文已經(jīng)詳細介紹了不同體制無掃描激光三維成像雷達系統(tǒng)的工作原理、國內(nèi)外研究現(xiàn)狀、系統(tǒng)優(yōu)缺點。為了更加直觀地體現(xiàn)出不同系統(tǒng)的技術(shù)特點,表2對7種無掃描激光成像雷達系統(tǒng)部分特性進行歸納總結(jié)。
表2 7種無掃描激光成像雷達系統(tǒng)部分性能比較
3.2 發(fā)展趨勢分析
基于LM-APDs陣列閃光激光雷達的核心器件是LM-APDs焦平面陣列,高靈敏度、高增益、大規(guī)模、高精度、低噪聲、快速讀出、工作溫度限制較小等是該器件的發(fā)展趨勢。
光子計數(shù)激光雷達的核心器件是GM-APDs焦平面陣列。為了提高圖像分辨率,需要擴大其陣列規(guī)模;為了進一步提高系統(tǒng)探測距離,需要將微透鏡陣列與APD陣列集成整合,充分利用反射回光的能量;為使探測器獲得高增益,其制冷問題有待進一步解決;需要進一步降低暗計數(shù),解決像素串?dāng)_的問題;需要改善統(tǒng)計算法,來提高成像速度。近年來一些國家已經(jīng)研制出多工作模式的APD焦平面陣列,響應(yīng)波長范圍從可見光到中波紅外,陣列規(guī)模有望突破512 x 512,應(yīng)用范圍也將不斷拓寬。
增益調(diào)制型激光成像雷達的核心器件是ICCD,需要進一步降低器件的驅(qū)動電壓和功耗,減小IIT與CCD耦合損耗。不同的增益調(diào)制模式影響測距精度,需要找出最佳的調(diào)制方式。對于單通道,快速實現(xiàn)三維圖像重建是其關(guān)鍵。對于雙通接收,消除雙相機自身誤差是關(guān)鍵。
FMCW激光三維成像雷達的核心器件是光電混頻探測器陣列,現(xiàn)有的EBAPS成像幀速與圖像分辨率無法做到兼容,制約了該體制激光成像雷達的成像效果。國際上正在進行技術(shù)攻關(guān),實現(xiàn)易于調(diào)制、大面陣、低功耗的光電混頻探測器陣列。
鑒相式三維成像激光雷達,同樣采用ICCD作為接收端,需要不斷提高ICCD性能。研制發(fā)射功率更加穩(wěn)定的激光光源、尋找解決運動目標(biāo)失真問題新方案是鑒相式三維成像激光雷達的發(fā)展趨勢。
基于偏振調(diào)制三維成像激光雷達的核心器件是電光調(diào)制器,其發(fā)展趨勢是實現(xiàn)低調(diào)制電壓、低功耗、大視場角、入射光角度和工作溫度影響較小。該體制同樣采用雙相機接收,消除雙相機問題是關(guān)鍵。
條紋管激光成像雷達的核心器件是條紋管。發(fā)展趨勢是降低器件的工作電壓,減小內(nèi)部噪聲,消除熒光屏上中間與邊緣的差異現(xiàn)象。對于多縫結(jié)構(gòu)而言,增加成像面積是關(guān)鍵。綜合不同核心器件來看,目前實現(xiàn)無掃描激光三維成像有兩個發(fā)展方向:一是通過采用3D傳感器實現(xiàn)成像;二是采用基于2D傳感器來實現(xiàn)成像,如圖24所示。
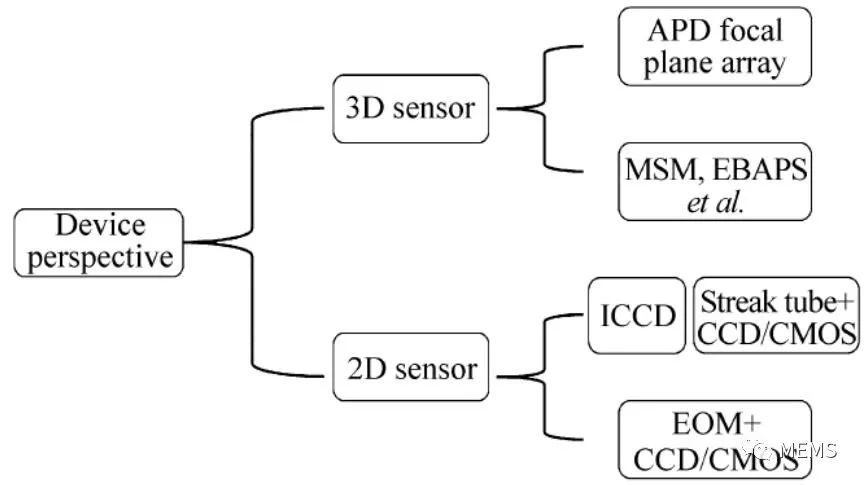
圖24 三維成像激光雷達的傳感器分類
APD焦平面陣列是3D傳感器的典型代表,包括線LM-APDs、GM-APDs,由APD陣列、微透鏡陣列(Micro Lens Array,MLA)和讀出電路(Read out integrated circuit,ROIC)組成。目前閃光激光雷達技術(shù)在國外相關(guān)領(lǐng)域處于領(lǐng)先地位,已出色的完成了許多空間任務(wù),同時在無人駕駛、無人機等領(lǐng)域也得到廣泛應(yīng)用。
國外APD陣列制作成本高,據(jù)資料顯示美國雷神公司研制的基于HgCdTe LM-APDs的相機價格不低于50萬美元,且陣列規(guī)模目前最高只有256 x 256,而CCD相機最大能到4096 x 4096,相比之下差距明顯。由于國外對我國大面陣探測器實施技術(shù)封鎖和嚴格禁運,目前能買到的面陣最大規(guī)格為8 x 8,線陣為1 x 16。
國內(nèi)報道的APD焦平面陣列規(guī)模較小,讀出電路復(fù)雜、集成度不高,未達到三維成像應(yīng)用標(biāo)準,大部分還處于理論分析和實驗測試階段。其他例如MSM、EBAPS等3D傳感器也存在相似的問題,這里不再贅述。
傳統(tǒng)的2D傳感器有CCD和CMOS,目前技術(shù)較為成熟,具有大規(guī)模、高幀速、寬范圍的優(yōu)勢。采用2D傳感器實現(xiàn)三維成像,解除了3D傳感器對三維成像激光雷達圖像分辨率的限制,但需要通過其他方法獲取時間信息,其核心思想是將時間信息轉(zhuǎn)換為2D傳感器可探測的物理信息。通過前面的介紹,利用2D傳感器實現(xiàn)三維成像的方案較多,包括增益調(diào)制型、FMCW、鑒相式、基于偏振調(diào)制和條紋管激光雷達,歸納起來可以分為三類:利用ICCD的單/雙通道接收、利用條紋管的單通道接收、利用電光調(diào)制器的雙通道接收。
其中ICCD和條紋管原理相似,目標(biāo)反射回光先通過光電陰極產(chǎn)生光電子,接著在電學(xué)層面進行時間信息轉(zhuǎn)換,然后轟擊熒光屏轉(zhuǎn)換為光信號,最后通過后端的2D傳感器進行接收。回波信號變化過程為“光-電-光-電”共有3次光電轉(zhuǎn)換。電光調(diào)制器則是將時間信息轉(zhuǎn)換過程在光學(xué)層面進行,回波信號變化僅有1次“光-電”轉(zhuǎn)換,省去了多重轉(zhuǎn)換過程,減小能量損失、提高了利用率,減小電學(xué)噪聲、提高了信噪比。
這種在光學(xué)層面進行時間信息轉(zhuǎn)換后獲取的飛行時間也稱為光學(xué)飛行時間(Optical Time-of-Flight,OToF)。國外資料顯示,許多研究機構(gòu)正在開展光學(xué)飛行時間激光雷達系統(tǒng)的研究,在APD焦平面陣列發(fā)展的瓶頸時期,極有可能成為其絕佳的替代品。
4 結(jié)束語
本文對閃光式、光子計數(shù)、增益調(diào)制型等7種無掃描激光三維成像雷達進行了綜述,闡述了不同體制的工作原理、國內(nèi)外發(fā)展現(xiàn)狀,比較分析了不同成像激光雷達的體制優(yōu)勢和技術(shù)短板,結(jié)論如下:在遠距離成像應(yīng)用中,閃光式、光子計數(shù)激光成像雷達探測距離遠,同時能夠保證高測距精度;在近距離成像應(yīng)用中,調(diào)頻連續(xù)波和鑒相式激光成像雷達測距精度更高,不易使探測器發(fā)生飽和、損壞現(xiàn)象;在對動態(tài)目標(biāo)成像應(yīng)用中,采用累積探測方式的光子計數(shù)和鑒相式成像激光雷成像速度較慢,無法滿足任務(wù)需求。從對核心器件的發(fā)展現(xiàn)狀分析,得出如下結(jié)論:為了獲得高分辨率圖像,采用像素規(guī)模大、成本相對較低、技術(shù)成熟的2D傳感器來實現(xiàn)激光三維成像具有顯著優(yōu)勢;為了得到高質(zhì)量的成像效果,選擇在光學(xué)層面進行時間信息轉(zhuǎn)換的方法,具有高能量利用率、高信噪比的優(yōu)勢。
結(jié)合我國無掃描激光雷達領(lǐng)域發(fā)展情況,一方面提高國內(nèi)半導(dǎo)體產(chǎn)業(yè)技術(shù)水平,積極開展APD焦平面陣列等先進3D傳感器的研制工作,縮小與國外的差距;另一方面是根據(jù)不同體制的特點,結(jié)合我國技術(shù)優(yōu)勢,運用創(chuàng)新思維積極尋找3D傳感器的替代品,來達到國外激光三維成像先進水平。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52857瀏覽量
766000 -
激光雷達
+關(guān)注
關(guān)注
971文章
4226瀏覽量
192590
原文標(biāo)題:無掃描激光三維成像雷達研究進展及趨勢分析
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
從 “必須噴粉” 到 “無粉測量”:激光三維掃描技術(shù)在高反光表面測量中的革命性突破

激光三維掃描技術(shù):無噴粉條件下高反光表面三維重建的光學(xué)原理與應(yīng)用
非接觸式激光三維掃描應(yīng)對鏡面反射表面的無噴粉測量方案:原理與創(chuàng)新
超酷的樹莓派激光雷達掃描儀!

casaim自動化三維激光掃描
三維掃描與建模的區(qū)別 三維掃描在工業(yè)中的應(yīng)用
如何將三維激光掃描儀與BIM結(jié)合使用
三維激光掃描儀的數(shù)據(jù)可視化技術(shù)
三維激光掃描儀在工程測量中的優(yōu)勢
三維激光掃描儀與無人機結(jié)合的應(yīng)用
三維激光掃描儀應(yīng)用領(lǐng)域 三維激光掃描儀與傳統(tǒng)測量工具比較
激光雷達技術(shù)的基于深度學(xué)習(xí)的進步
蔡司激光三維掃描儀有效掃描金屬材料






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論