 自動駕駛基礎之高精度地圖和定位慣性測量單元IMU的詳細介紹
自動駕駛基礎之高精度地圖和定位慣性測量單元IMU的詳細介紹
定位,感知軟件及規劃都依賴高精度地圖,高精度地圖可以幫助車輛找到合適的行車空間,幫助規劃器確定不同的路線選擇,并幫助預測軟件預測道路上其他車輛在將來的位置,在有限速或障礙物的路段,高精度地圖可以使車輛提前查看,提前加速或者變道。
高精度地圖的構建一般需要以下五個步驟:
·數據采集
·數據處理
·對象檢測
·手動驗證
·地圖發布
數據采集是采用多種傳感器,如GPS,慣性測量單元,激光雷達和攝像機,通過多種傳感器收集大量數據,最終繪制出高精度地圖。
數據處理指的是對收集到來的數據進行整理,分類和清洗以獲得沒有任何語義信息或注釋的初始地圖模板。經過上述5個步驟之后,高清地圖就建立起來了。一般情況下,隨地圖發布的還有自上而下的視圖的相應定位地圖以及三維點云地圖。
在構建和更新高精度地圖時,現在業界有兩種模式:一是使用傳統的專業測繪車,地圖公司配備專業測繪車來采集地圖信息。二是使用創新的眾包模式,眾包意味著Apollo向公眾發布其數據采集工具,以便任何人都可以參與制作高精度地圖的任務。眾包加快了高精度地圖的制作和維護。
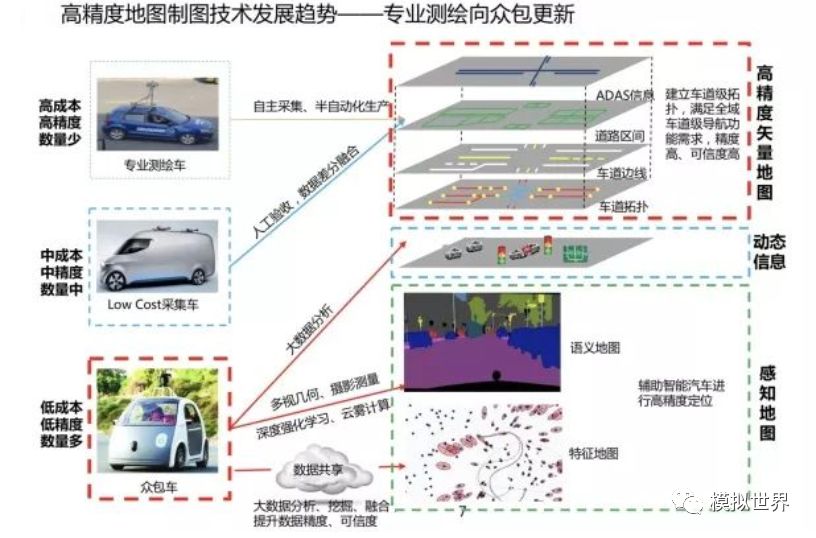
上圖就大致講了高清地圖的發展趨勢,高精度地圖發展趨勢會從專業測繪向眾包更新發展。上圖有幾個的采集方式,最上面是專業測繪車,這是專業地圖商按照功能制作,它的成本和精度都很高,但是可以做到這種專業測繪車的很少,它通過自主采集半自動化以及全自動化生產的方式獲得了高精度的矢量地圖,矢量地圖包括車道級拓樸、車道邊線、道路區間以及ADAS數據信息,它能夠滿足車道級的導航功能的自動駕駛,精度和可信度高,問題是成本非常高。
在這些專業的測繪車的高新采集技術基礎上,我們認為可以出現一種Low Cost采集車,它的成本和精度比較低,它的數量可以多一些,它會通過采集一些精度稍低的數據,通過人工驗收、數據的差分融合等技術手段來不斷地更新高精度的矢量地圖。最下面是眾包車,成本最低,精度也很低,我相信未來自動駕駛車很多會采用同樣的設備來去做自動駕駛,優勢在于數量非常大。
通過數量大彌補單個數據質量精度低的問題,可通過大數據分析獲得動態交通情報。對地圖比較了解的人會知道,高精地圖實際上分靜態地圖、動態地圖,很多動態信息是來自于眾包車輛的數據獲取,包括擁堵、交通事故、天氣等,還可通過多視幾何、攝影測量、深度強化學習以及云霧計算等方式生成語義地圖和特征地圖,另外也通過大量數據共享、挖掘、分析和融合來提升精度和可信度。
眾包車輛生成的數據,除了生成動態的信息能夠更新一部分高清地圖外,還生成了一些感知地圖,用于自動駕駛輔助定位。
簡單小結一下眾包更新的創新和優勢,首先眾包更新是實現實時更新的低成本和可量產化的方案,具有一些非常顯著的優勢,中國大概600多萬公里的道路數據,如果按照專業測繪的方式采集,將是個天文數字,因此如果有一個基礎的高精度地圖網,通過眾包的方式來更新地圖獲得城市細道路數據,它將是低成本可量產的方案。
另外,在商業模式上也有新的吸引力,數據的使用者同時也是數據的提供者,在未來商業模式上可能會發生一些變化,隨著區塊鏈技術的發展,可能會看到新的商業模式出現。在技術上,它的難度在于精度和可信度都比較低,但是隨著大數據技術的發展以及AI技術的突破,這些技術門檻會逐步降低,同時精度和可信度將逐步提高。
比如百度Apollo地圖就加入了眾包地圖的模式來加快高精度地圖的生成。
-
傳感器
+關注
關注
2558文章
52038瀏覽量
760657 -
IMU
+關注
關注
6文章
332瀏覽量
46336 -
自動駕駛
+關注
關注
788文章
14085瀏覽量
168495
原文標題:自動駕駛基礎(五十八) -慣性測量單元(IMU)四
文章出處:【微信號:Analog_World,微信公眾號:模擬世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論