") HC-SR04+MS5611的四軸飛行器PCB設(shè)計(jì)
HC-SR04+MS5611的四軸飛行器PCB設(shè)計(jì)

1系統(tǒng)功能概述
1.1 四軸飛行器原理介紹
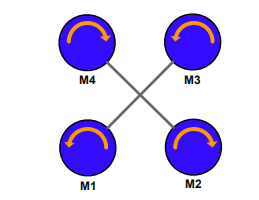
四軸飛行器通過調(diào)節(jié)四個(gè)電機(jī)轉(zhuǎn)速來改變旋翼轉(zhuǎn)速,實(shí)現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。結(jié)構(gòu)上,本次應(yīng)用中使用四軸飛行器的飛行模式是 X 模式,如圖“圖 1.1”所示,四軸飛行器的四個(gè)電機(jī)一對(duì)正轉(zhuǎn),一對(duì)反轉(zhuǎn)使得垂直方向旋轉(zhuǎn)的反扭矩平衡, 從而保證了飛行的穩(wěn)定。四軸飛行器可以用作航拍、玩具等,
在我們生活中已經(jīng)越來越常見。

圖 1.1 四軸飛行器飛行模式(X 模式)
四軸飛行器的基本飛行狀態(tài)可以分為:垂直飛行、水平飛行(俯仰和翻滾)、偏航飛行,分別如“圖 1.2”所示。(1)垂直飛行:如下圖(a)所示,同時(shí)增加或減少四個(gè)電機(jī)的轉(zhuǎn)速,四軸飛行器則會(huì)垂直上升或下降。(2)水平飛行:如下圖(b)所示,增加兩個(gè)電機(jī)的轉(zhuǎn)速,如電機(jī) M1 和 M4,同時(shí)減少另兩個(gè)電機(jī) M2和 M3 的轉(zhuǎn)速,則四軸飛行器將向右飛行,同理可得向前、向后、向左方向的飛行方式。(3)偏航飛行:如下圖(c)所示,增加兩個(gè)電機(jī)的轉(zhuǎn)速,如電機(jī) M1 和 M3,同時(shí)減少另兩個(gè)電機(jī) M2和 M4 的轉(zhuǎn)速,則四軸飛行器將順時(shí)針偏轉(zhuǎn),同理可得逆時(shí)針偏轉(zhuǎn)的飛行方
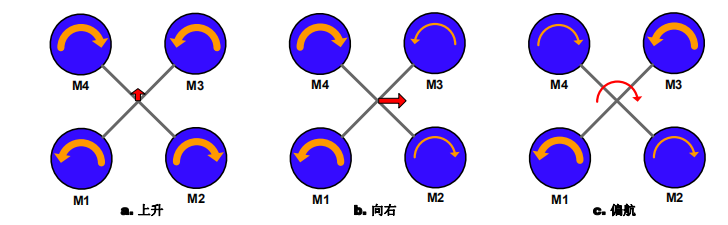
圖 1.2 四軸飛行器飛行
1.2 PID 平衡控制
對(duì)于四軸飛行器平衡控制算法中,電機(jī)的轉(zhuǎn)速并不是單獨(dú)由油門來決定,而是以油門為基準(zhǔn)整合上空間三軸俯仰(Pitch)、翻滾(Roll)和偏航(Yaw)的控制量來決定,如下公式所示。
例如,四軸飛行器機(jī)頭向下傾斜時(shí)(對(duì)應(yīng)俯仰),為了達(dá)到平衡,電機(jī) 3 和電機(jī) 4 增大轉(zhuǎn)速,電機(jī) 1 和電機(jī) 2 減小轉(zhuǎn)速,此時(shí)俯仰控制量應(yīng)該向負(fù)增大(控制量的正負(fù)由姿態(tài)芯片 MPU6050 擺放決定)。
電機(jī) 1 轉(zhuǎn)速 = 油門 + 俯仰 + 橫滾 - 偏航
電機(jī) 2 轉(zhuǎn)速 = 油門 + 俯仰 - 橫滾 + 偏航
電機(jī) 3 轉(zhuǎn)速 = 油門 - 俯仰 - 橫滾 - 偏航
電機(jī) 4 轉(zhuǎn)速 = 油門 - 俯仰 + 橫滾 + 偏航
上述的三軸控制量則由本系統(tǒng)中使用的增量式 PD 控制得到(PID 控制算法的一種)。以俯仰控制量為例,MPU6050 可以得到空間三軸的旋轉(zhuǎn)角速率,正好是角度的微分,所以可以得到以下計(jì)算公式。
俯仰(Pitch)控制量 = P * 對(duì)應(yīng)期望角度與實(shí)際角度的偏差 + D * 對(duì)應(yīng)軸的角速率值
翻滾(Roll)控制量 = P * 對(duì)應(yīng)期望角度與實(shí)際角度的偏差 + D * 對(duì)應(yīng)軸的角速率值
偏航(Yaw)控制量 = D * 對(duì)應(yīng)軸的角速率值
由于實(shí)際偏航角(Yaw)無法由 MPU6050 測得,需要用電子羅盤,但是電子羅盤在四個(gè)電機(jī)的電磁作用下,精度受影響較大,所以上式中偏航(Yaw)控制量去除比例項(xiàng),僅由微分項(xiàng)得到。
MPU6050 的姿態(tài)刷新頻率約為 10ms 一次
1.3 定高控制
高度的采集通過超聲波模塊 HC-SR04 實(shí)現(xiàn),由于測量距離的限制(約 2cm-120cm),本系統(tǒng)僅適用于室內(nèi)低空飛行,默認(rèn)高度設(shè)定為 60cm。
定高部分算法,根據(jù)超聲波檢測的距離進(jìn)行 PID 控制,定高控制的輸出量與初始油門(由機(jī)身本身的重力和當(dāng)前電池電量決定)疊加作為當(dāng)前油門,從而不斷調(diào)節(jié)四軸飛行器油門值來實(shí)現(xiàn)垂直方向上的定高,而水平方向由于缺少 GPS 相關(guān)模塊,未能得到進(jìn)行水平方向的控制量,所以本系統(tǒng)只能實(shí)現(xiàn)簡單的懸停。
超聲波模塊 HC-SR04 置于四軸飛行器底部,高度刷新頻率約為 50ms 一次。
1.4 四軸飛行器演示板
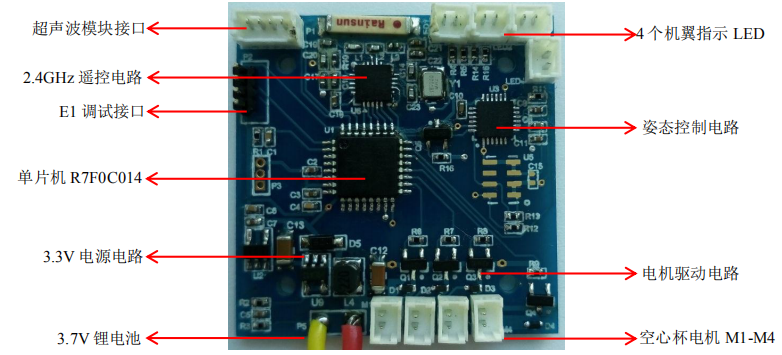
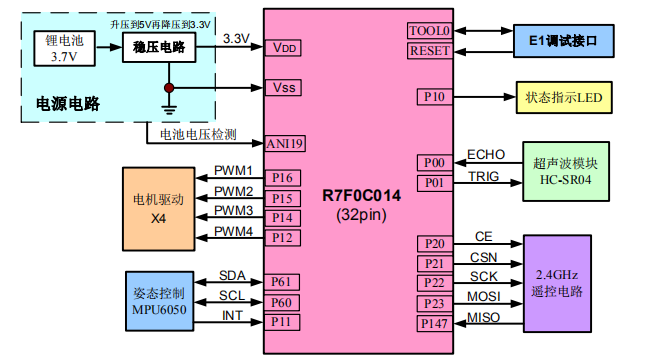
本篇用戶手冊(cè)使用的演示板如“圖 1.3”所示,單片機(jī) R7F0C014 通過 I/O 端口模擬 IIC 控制姿態(tài)芯片MPU6050,然后使用 MPU6050 的硬件解算(內(nèi)置的 DMP 模塊)直接獲取和姿態(tài)相關(guān)的四元數(shù)等數(shù)據(jù),再將四元數(shù)轉(zhuǎn)化為歐拉角,最后以當(dāng)前姿態(tài)角和捕捉的遙控?cái)?shù)據(jù)為控制量,通過 PID 控制四個(gè)電機(jī)以達(dá)到控制四軸飛行器姿態(tài)的目的。通過 MPU6050 的硬件解算,可以避免復(fù)雜的姿態(tài)融合算法,從而減輕單片機(jī)的負(fù)擔(dān)。
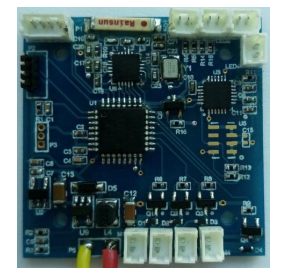
圖 1.3 四軸飛行器演示板
系統(tǒng)整機(jī)結(jié)構(gòu)圖如“圖 1.4”所示。為了硬件的安裝和固定,演示板背面并沒有貼裝任何器件,而是直接固定在機(jī)架上。機(jī)架的底部用于放置鋰電池,并固定超聲波模
圖 1.4 四軸飛行器整機(jī)正面和背面
1.5 操作說明
(1)啟動(dòng):依次打開四軸飛行器和遙控器的電源開關(guān),四軸飛行器的四個(gè)機(jī)翼處 LED 將會(huì)閃爍兩秒,然后變?yōu)槌A痢?/p>
(2)解鎖:將遙控器左手邊的油門拉至最低,油門搖桿上方的藍(lán)色 LED 點(diǎn)亮,解鎖完成(注意:解鎖完成前不要操作方向搖桿),此時(shí),右手方向搖桿上方的藍(lán)色 LED 不斷閃爍,表明和四軸飛行器通信正常,便可以開始遙控飛行器。
(3)定高飛行:此功能僅限室內(nèi)低空飛行(1.5 米以內(nèi))。解鎖完畢后,拉高油門,待四軸飛行器達(dá)到一定高度后,按下遙控器最右下方按鍵,進(jìn)入定高飛行,四軸飛行器會(huì)定高在默認(rèn)設(shè)定的 0.6 米處飛行。再次按下此按鍵,四軸飛行器將自動(dòng)降落,落地后需將油門拉至最低。
注意:因四軸飛行器飛行過程中,電機(jī)的電流消耗較大,可以達(dá)到數(shù)安培,飛行時(shí)間只能持續(xù)幾分鐘,當(dāng)機(jī)翼處 LED 閃爍時(shí),說明電池電量已過低,為了安全起見,請(qǐng)充電后再使用。
圖 1.5 四軸飛行器和遙控器
圖 1.6 四軸飛行器整機(jī)加外殼
1.6 四軸飛行器的不足和可改進(jìn)之處
(1)四軸飛行器定高:由于本應(yīng)用使用超聲波定高(硬件限制),所以只適用于室內(nèi)低空定高飛行。對(duì)于室外高空定高飛行,用戶可以根據(jù)需要加入氣壓計(jì) MS5611 實(shí)現(xiàn),本系統(tǒng)中也預(yù)留了此部分電路。但是由于場地環(huán)境限制,以及測試的時(shí)候發(fā)現(xiàn)氣壓計(jì) MS5611 存在測量精度不足和數(shù)據(jù)隨時(shí)間漂移等問題,因此沒有添加此部分功能。如有條件及需求,用戶可以自行添加此部分功能。
(2)姿態(tài)控制:姿態(tài)獲取方面,本應(yīng)用使用姿態(tài)芯片 MPU6050 的硬件 DMP 功能直接讀取并計(jì)算得到當(dāng)前姿態(tài),由于讀取的周期限制(約 10ms),姿態(tài)的更新頻率有限。用戶也可以采用讀取 MPU6050三軸重力加速度和三軸陀螺儀數(shù)據(jù)來獲取當(dāng)前姿態(tài),但是需要經(jīng)過較為復(fù)雜的姿態(tài)運(yùn)算和濾波(如卡爾曼濾波),建議采用高主頻的 MCU 實(shí)現(xiàn)(如 72MHz 以上),以提高姿態(tài)的更新頻率。而姿態(tài)控制算法方面,本應(yīng)用使用的是相對(duì)簡單的單級(jí) PID 控制,用戶也可以選擇串級(jí) PID 控制以達(dá)到更好的控制效果。
(2)參數(shù)調(diào)節(jié):系統(tǒng)中的姿態(tài)和定高的 PID 參數(shù)等適用于本套機(jī)械結(jié)構(gòu),是經(jīng)過多次試驗(yàn),得到的較優(yōu)參數(shù),用戶需要根據(jù)自己的系統(tǒng)選擇和調(diào)試相應(yīng)參數(shù),調(diào)試四軸飛行器時(shí),請(qǐng)做好一定保護(hù)措施,防止意外情況。
(3)遙控距離:由于本系統(tǒng)遙控器采用的是 PCB 天線,遙控器的發(fā)射功率強(qiáng)度有限,以致操控有效距離不到 10 米。用戶可以使用更大的天線(如鞭狀天線)加入遙控器的 2.4GHz 發(fā)射部分,以實(shí)現(xiàn)遠(yuǎn)距離操控。
1.7 安全注意事項(xiàng)
四軸飛行器具有一定危險(xiǎn)性,操作不當(dāng)可能會(huì)發(fā)生人身傷害。在調(diào)試四軸飛行器的時(shí)候,最好在室外空曠地方,并做好一定保護(hù)措施。剛接觸四軸飛行器的用戶,應(yīng)盡量在近距離低空飛行,熟練操作。如出現(xiàn)操作失誤,應(yīng)快速拉低油門,使四軸飛行器盡快降落,防止失控發(fā)生意外。
四軸飛行器演示板介紹
四軸飛行器演示板
四軸飛行器演示板的硬件結(jié)構(gòu)框圖如下
-
pcb
+關(guān)注
關(guān)注
4362文章
23467瀏覽量
408984 -
華強(qiáng)pcb線路板打樣
+關(guān)注
關(guān)注
5文章
14629瀏覽量
43869
發(fā)布評(píng)論請(qǐng)先 登錄
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關(guān)教程)
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關(guān)教程)
小型飛行器專用 AS-DR01模擬信號(hào)AI識(shí)別跟蹤模塊

《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總

激光毀傷系統(tǒng):低空飛行器的 “隱形獵手”
MATLAB在低空飛行器中的應(yīng)用

欣旺達(dá):已具備低空飛行器電池研發(fā)生產(chǎn)能力
MS5611D——2.7V到5.5V、 12Bit、單通道、具有掉電模式的數(shù)模轉(zhuǎn)換器
嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場景
飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場景
HDMI模塊的PCB設(shè)計(jì)
專業(yè)PCB設(shè)計(jì),高速PCB設(shè)計(jì),PCB設(shè)計(jì)外包, PCB Layout,PCB Design,PCB畫板公司,PCB設(shè)計(jì)公司,迅安通科技公司介紹
PCB設(shè)計(jì)與PCB制板的緊密關(guān)系
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論