") 雙相機(jī)立體視覺和結(jié)構(gòu)光立體視覺原理及優(yōu)勢(shì)對(duì)比
雙相機(jī)立體視覺和結(jié)構(gòu)光立體視覺原理及優(yōu)勢(shì)對(duì)比

目前的深度相機(jī)根據(jù)其工作原理可以分為三種:TOF相機(jī)、雙相機(jī)立體視覺、結(jié)構(gòu)光投射立體視覺。
1.TOF
TOF是Time of flight的簡寫,直譯為飛行時(shí)間的意思。所謂飛行時(shí)間法3D成像,是通過給目標(biāo)連續(xù)發(fā)送光脈沖,然后用傳感器接收從物體返回的光,通過探測(cè)光脈沖的飛行(往返)時(shí)間來得到目標(biāo)物距離。
TOF相機(jī)與普通機(jī)器視覺成像過程也有類似之處,都是由光源、光學(xué)部件、傳感器、控制電路以及處理電路等幾部單元組成。TOF相機(jī)不僅可以獲取到深度信息還可以獲取到圖像的灰度信息,微軟kinect2即是基于TOF原理的深度相機(jī)。
TOF 相機(jī)目前的主要應(yīng)用領(lǐng)域包括:物流行業(yè),安防和監(jiān)控,工業(yè)視覺,工業(yè)定位、工業(yè)引導(dǎo)和體積預(yù)估;替代工位上占用大量空間的、基于紅外光進(jìn)行安全生產(chǎn)控制的設(shè)備,醫(yī)療和生物,互動(dòng)娛樂等領(lǐng)域。
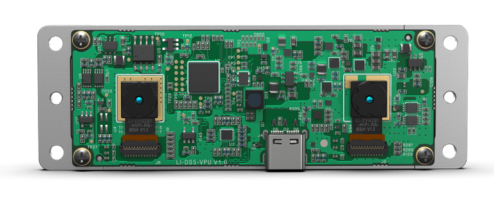
2.雙相機(jī)立體視覺
雙相機(jī)立體視覺指的是目前大家都在熱點(diǎn)研究的,僅依靠雙相機(jī)的視差獲取深度信息的方式。雙相機(jī)立體視覺相機(jī)因?yàn)榉浅R蕾嚰儓D像特征匹配,所以在光照較暗或者過度曝光的情況下效果都非常差,另外如果被測(cè)場(chǎng)景本身缺乏紋理,也很難進(jìn)行特征提取和匹配。例如純色的背景。
3.結(jié)構(gòu)光投射立體視覺
結(jié)構(gòu)光是通過紅外IR發(fā)射端投射人眼不可見的偽隨機(jī)散斑紅外光點(diǎn)到物體上,每個(gè)偽隨機(jī)散斑光點(diǎn)和它周圍窗口內(nèi)的點(diǎn)集在空間分布中的每個(gè)位置都是唯一且已知的。這是結(jié)構(gòu)光的存儲(chǔ)器中已經(jīng)預(yù)儲(chǔ)存了所有的數(shù)據(jù)。這些散斑投影在被觀察物體上的大小和形狀根據(jù)物體和相機(jī)的距離和方向而不同。拍攝到的斑點(diǎn)和已知斑點(diǎn)進(jìn)行對(duì)比,然后獲取到深度信息。根據(jù)三種不同的距離使用了三種不同尺寸的散斑,這樣的目的是為了在遠(yuǎn)中近三種距離內(nèi)都能得到相對(duì)較好的測(cè)量精度:近距離(0.8 – 1.2 m):可以獲得較高的測(cè)量精度,中距離(1.2 – 2.0 m):可以獲得中等的測(cè)量精度,遠(yuǎn)距離(2.0– 3.5 m):可以獲得較低的測(cè)量精度。
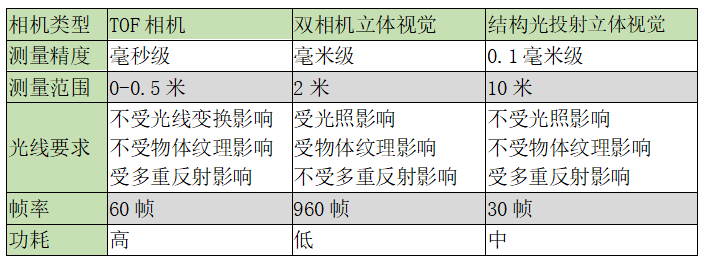
4.三種相機(jī)對(duì)比:
外星眼機(jī)器視覺從光線要求、幀率、測(cè)量范圍、功耗、測(cè)量精度等方面來給大家做下對(duì)比:
5.總結(jié):
1.雙目方案,最大的問題在于實(shí)現(xiàn)算法需要很高的計(jì)算資源,導(dǎo)致實(shí)時(shí)性很差,而且基本跟分辨率,檢測(cè)精度掛鉤。也就是說,分辨率越高,要求精度越高,則計(jì)算越復(fù)雜,同時(shí),純雙目方案受光照,物體紋理性質(zhì)影響。
2.結(jié)構(gòu)光方案,目的就是為了解決雙目中匹配算法的復(fù)雜度和魯棒性問題而提出,該方案解決了大多數(shù)環(huán)境下雙目的上述問題。但是,在強(qiáng)光下,結(jié)構(gòu)光核心技術(shù)激光散斑會(huì)被淹沒,因此,不合適室外。同時(shí),在長時(shí)間監(jiān)控方面,激光發(fā)射設(shè)備容易壞,重新更換設(shè)備后,需要重新標(biāo)定。
3.TOF方案,傳感器技術(shù)不是很成熟,因此,分辨率較低,成本高,但由于其原理與另外兩種完全不同,實(shí)時(shí)性高,不需要額外增加計(jì)算資源,幾乎無算法開發(fā)工作量,是未來發(fā)展的一個(gè)重要方向。
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1455瀏覽量
54574
原文標(biāo)題:深度相機(jī)—TOF、雙相機(jī)立體視覺、結(jié)構(gòu)光立體視覺原理及優(yōu)勢(shì)對(duì)比
文章出處:【微信號(hào):UFO-VISION,微信公眾號(hào):外星眼機(jī)器視覺網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
中科慧眼亮相2025新加坡亞洲科技展
智能軟件+硬件解決方案克服實(shí)時(shí)立體視覺中的挑戰(zhàn)

中科慧眼三目立體視覺產(chǎn)品的功能優(yōu)勢(shì)
中科慧眼三目立體視覺相機(jī)將亮相2025上海車展
對(duì)于結(jié)構(gòu)光測(cè)量、3D視覺的應(yīng)用,使用100%offset的lightcrafter是否能用于點(diǎn)云生成的應(yīng)用?
友思特與Stereolabs建立合作伙伴關(guān)系
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
產(chǎn)品快訊 | Teledyne FLIR IIS發(fā)布最新產(chǎn)品信息
用于任意排列多相機(jī)的通用視覺里程計(jì)系統(tǒng)

德國進(jìn)口蔡司體視顯微鏡的使用方法

立體視覺新手必看:英特爾? 實(shí)感? D421深度相機(jī)模組
居然還有這樣的10.1寸光場(chǎng)裸眼3D視覺訓(xùn)練平板電腦?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論