 用于智慧出行的智能車輛系統
用于智慧出行的智能車輛系統

2019年第一期(總第三十二期)“錢學森國際杰出科學家系列講座”于5月7日在中國科學院自動化研究所舉辦。本期講座邀請到美國福特公司創新與研發中心技術研究員Dimitar Filev博士做題為“Intelligent vehicle systems for smart mobility ”的報告。
報告聚焦人工智能技術在福特智能汽車系統中的應用,重點介紹機器學習、決策方法以及算法在福特產品的生產過程中的應用,包括機器學習應用于車輛診斷和校準、駕駛建模和車輛個性化,燃油經濟性優化和自動駕駛。報告還討論了在車輛控制和信息系統中集成人工智能技術的經驗教訓、正在進行的研究以及作為智能移動應用構建模塊的未來趨勢。
嘉賓介紹:
Dimitar Filev 博士現任美國國家工程院院士、福特研究創新與研發中心技術研究員,主要進行計算智能、人工智能和智能控制的研究,以及它們在自動駕駛、車輛系統和汽車工程中的應用。發表學術論文200余篇,14000余次引用的會議論文,擁有美國專利100多項。2008年獲IEEE SMC協會諾伯特·維納獎,2015年獲IEEE CIS協會先鋒獎。他獲于1979年在捷克理工大學(Czech Technical University)獲得電氣工程博士學位。目前是IEEE會士和美國國家工程院院士。曾于2016年-2017年擔任IEEE系統、人與控制論學會(IEEE Systems, Man, & Cybernetics Society)主席。
內容:
早上好,我的名字是 Dimitar Filev 非常感謝王教授的精彩介紹,我跟他共同在IEEE以及一些團體工作多年。但是我們從沒有正式合作過,但我認為現在是個好機會,因為我們現在在北京有研究中心,我們可以建立專業的合作,我本人非常期待。非常高興今天能再次與你們進行分享。
福特在汽車工業領域擁有悠久的歷史,生產了許多汽車和卡車。福特不僅僅是汽車生產商,也是一家科技創新公司,我們在全球范圍內擁有多家研究和先進工程中心,分別在墨爾本、南京、慕尼黑等等。
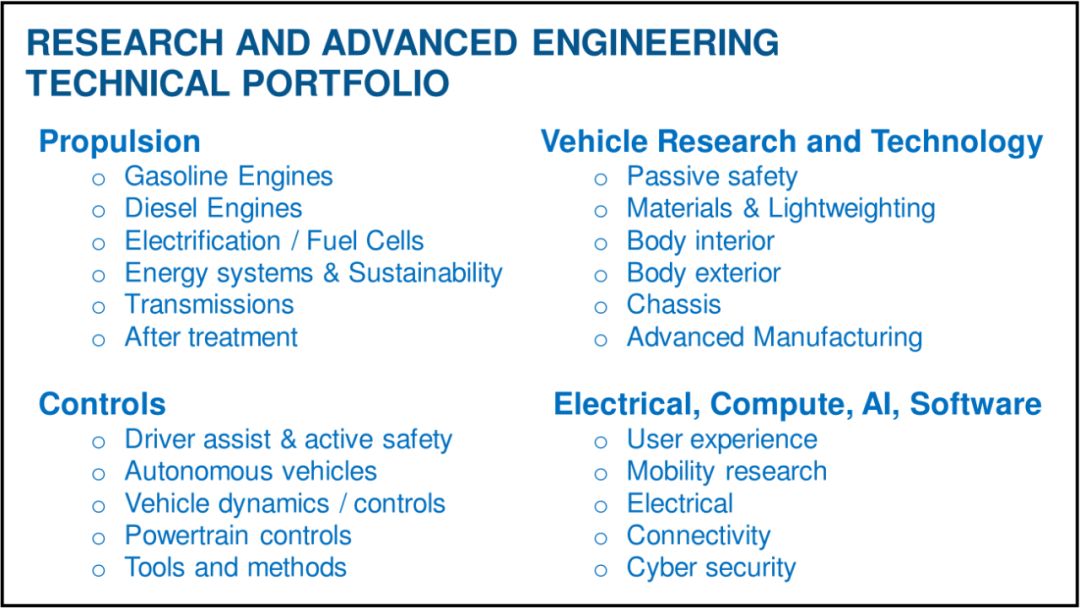
這是我們主要的四個研究領域,第一個集中于動力系統(propulsion),為車輛提供動力,包括汽油引擎、柴油引擎、能量管理以及傳動;第二部分是汽車研究與技術(Vehicle Research and Technology),由被動安全、材料&輕量化、車架內外部和底盤等組成;第三部分是控制(Control),主要是駕駛輔助、自動駕駛車輛以及車輛動態和控制;最后是電子(Electrical),Compute單元專注于用戶體驗、電子以及信息安全。
福特的“研究&先進工程組織”由2名亨利福特技術Fellow領銜,擁有20名高級技術領導、數百名技術專家,其中34%具有博士學位,分別位于密西根的Dearborn、德國的Aachen、加州的 Palo Alto三個中心。
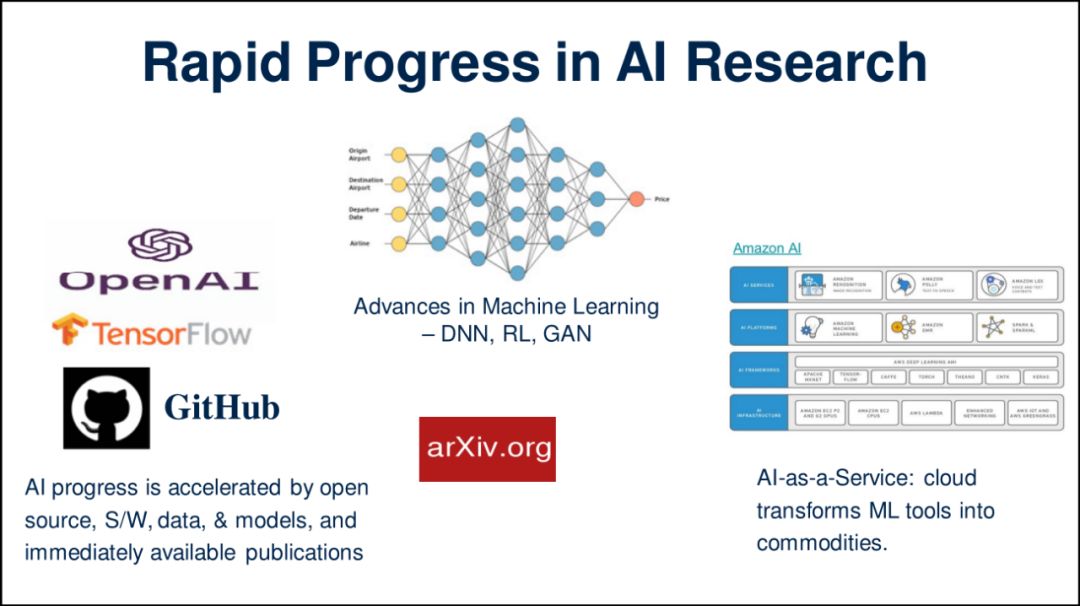
福特是世界上第一個將神經網絡應用到阿斯頓馬丁的汽車點火失敗檢測中去的,點火失敗會導致燃燒不充分,后來將這個方法應用到了福特的V10引擎。大概在二十年前,人們不相信AI能提供任何效果,如今是AI發展的好時機。涌現出了像 Github、Tensorflow 等這樣的好的資源,這些開源的人人都可以用,arxiv上也有成千上萬的論文可供閱讀。
AI的進步和汽車的改變是推動智能系統部署在車輛上的主要的驅動力。車輛產生的數據從過去的每小時0.5GB到后來的25GB再到現在無人駕駛車輛的1.7TB。
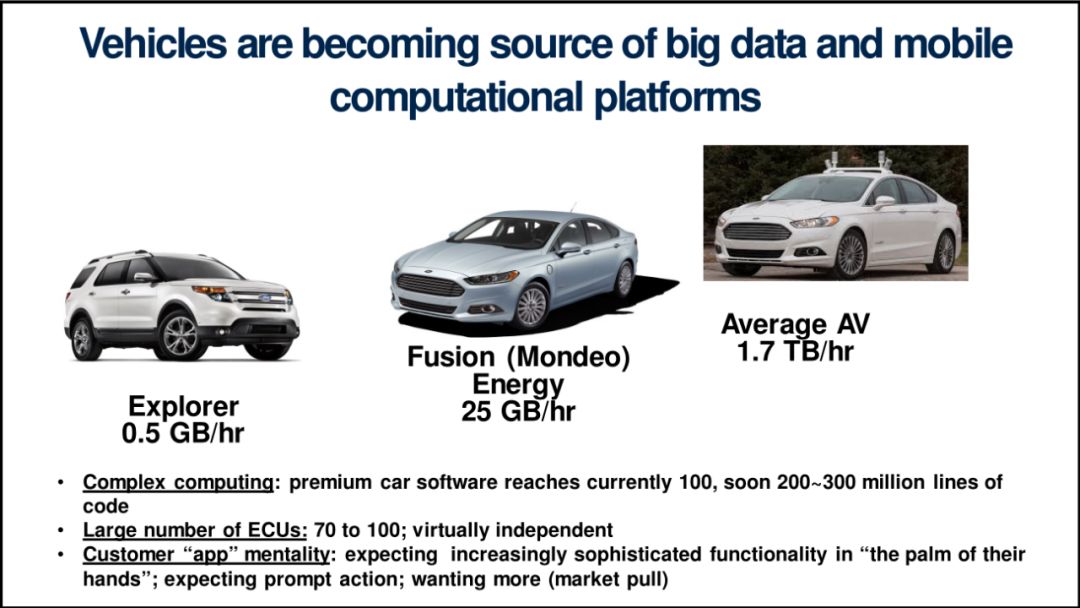
如此大量的數據如何實時的進行擬合以及合理利用是個重要的話題,車輛已經成為了大數據源和移動計算平臺,設備制造商(OEMs)和交通系統都在發生著改變。傳統的車輛已經具備很好的動力總成系統、底盤系統、空調系統和娛樂系統,同時車輛具備一些智能駕駛輔助系統例如ABS、車身動態穩定系統、尋跡系統等。
這些系統已經非常智能,但我們在此基礎上設計了智能用戶界面讓車輛更加定制化以適應不同的用戶。虛擬駕駛系統與交通移動云連接,控制著車輛。因此,定制化和智能化是自動駕駛車輛發展的兩個方向。
接下來討論幾個駕駛汽車中的應用以及福特在自動駕駛中的研究。在汽車控制中有自動動力系統控制、自動轉向控制和半自主懸架系統這些不同的系統經過標定可以實現舒適、常規和運動三種模式之間的切換。
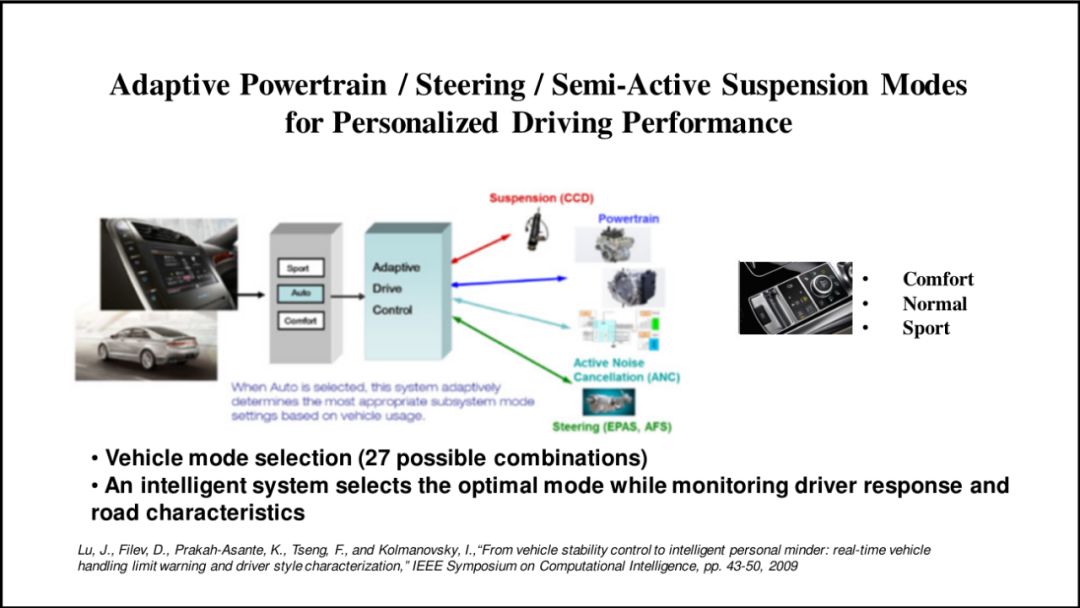
車輛模式的選擇共有27中組合,讓駕駛員在這之間進行選擇是一件困難的事,而智能系統則可以基于道路特點和駕駛員的反應選擇最優的模式,這也是定制化的一個方面。另一個重要的應用是智能巡航控制,它基于速度曲線尋找最優的巡航速度設置點來達到最優化燃油消耗的目標。
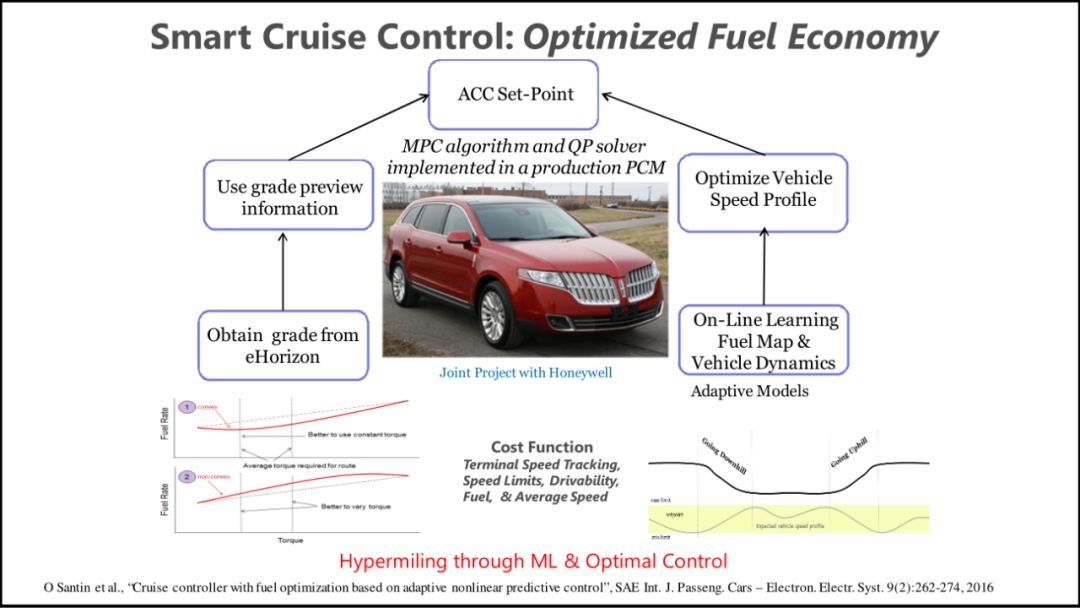
通過對數字地圖的分析、交通標志的識別、道路幾何形狀的辨別系統能夠為駕駛者建議最優的加減速、檔位,提供最高效的駕駛模式選擇。
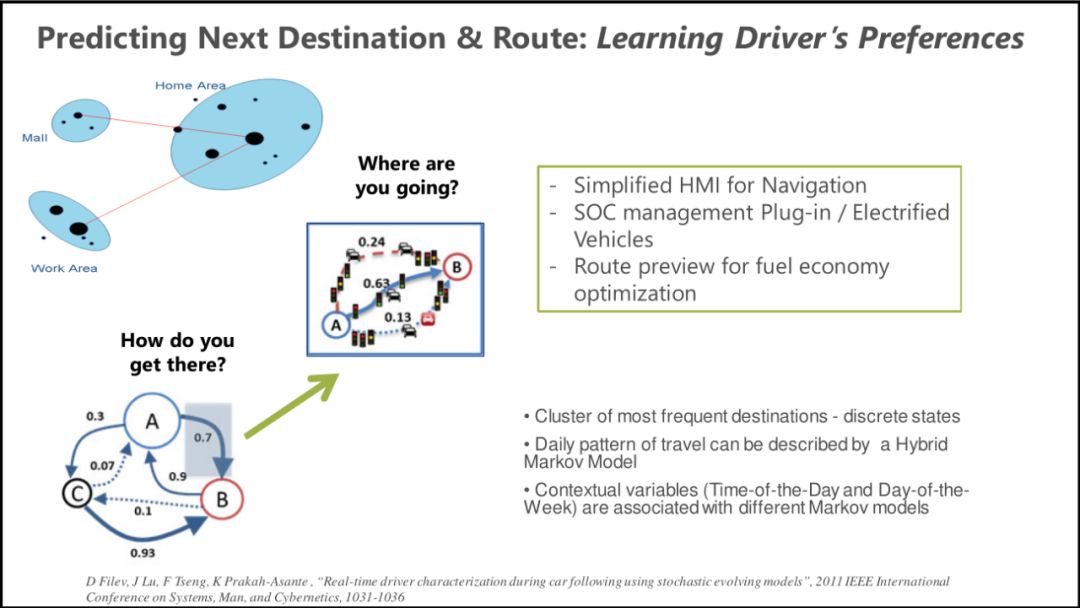
此外,分析駕駛員的行為由此生成評估報告、根據車輛在不同時間頻繁的行車、停車的記錄可以估計出下一個目的地。
福特在自動駕駛領域的布置和發展包括投資了 Argo AI 以及成立了自動駕駛子公司AV LLC,這兩家由福特所有的獨立實體計劃在2021年前完成研發并投入生產。
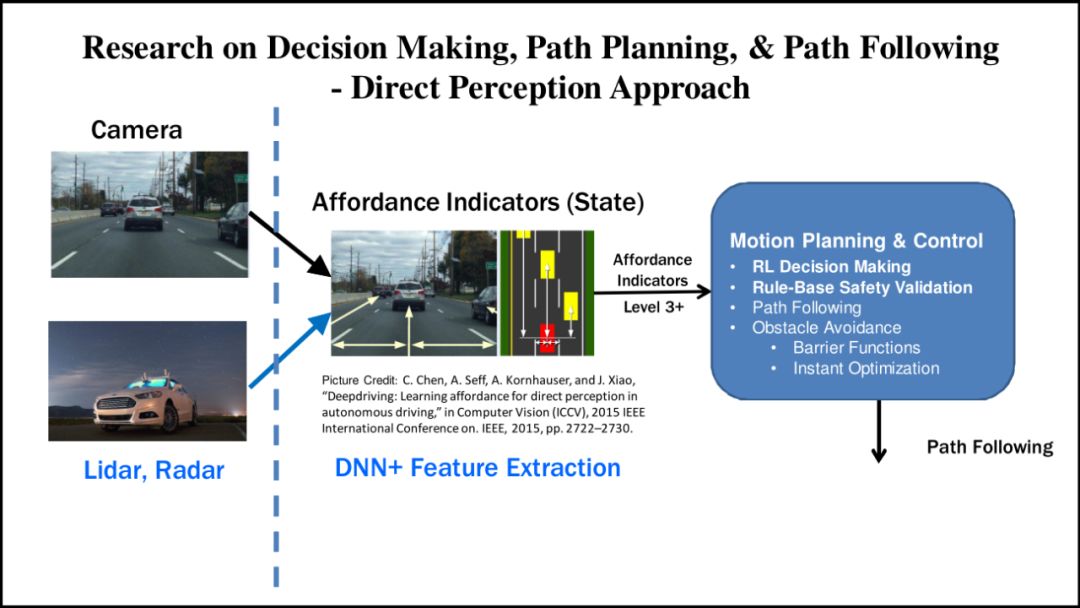
福特研究自動駕駛采用的是分層級的方法,層級從反射級 Reflexive 到深思級 Reflective。反射級指的是當人們在駕駛時不需要思考而下意識作出的一些舉動,Reflective 則是完全相反的,比如人在高速駕駛的時候會不斷地思考獲取最佳的決策。
分層級方法有三個層級,Decision Making 曾屬于高層規劃,基于強化學習、博弈論方法;稍低一個層級的 Path Planning主要完成避障等場景;沿著規定好的軌跡行駛則是由最后的 Path Following層級使用模型預測控制完成。
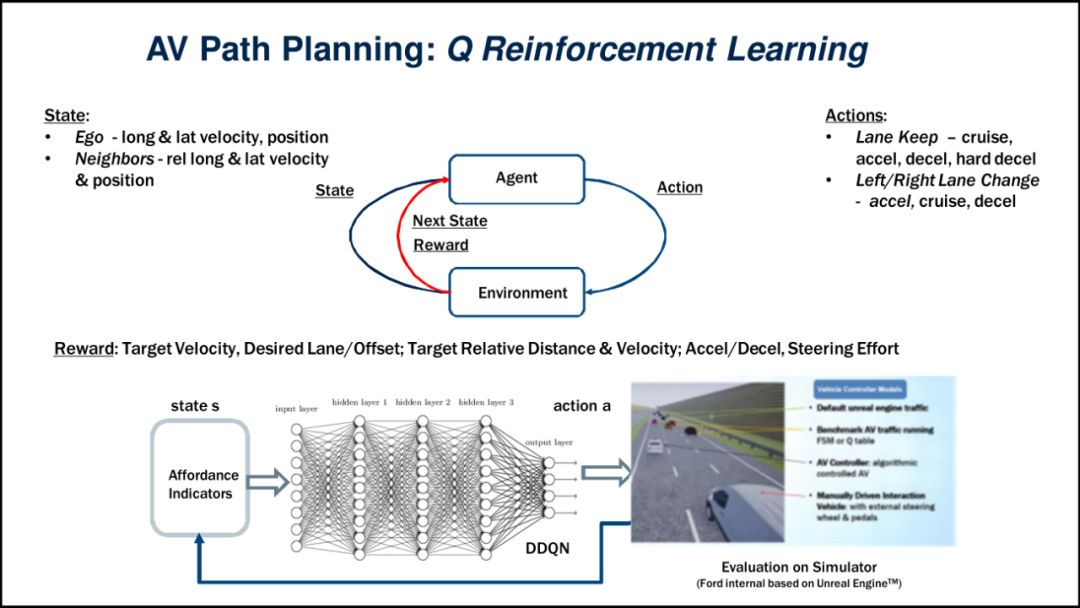
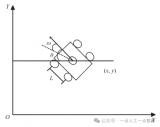
Path Planning 部分使用的是Q強化學習方法,強化學習通過最大化累計收益函數Q函數來獲得最佳決策,此處狀態為車輛本身以及相鄰車輛的實時的橫向和縱向位置,行為是車道保持、巡航速度增減以及左右換道。仿真器用來訓練神經網絡擬合決策Q函數,該算法提供了狀態到行動的映射,得到的是貝爾曼方程的實時解。
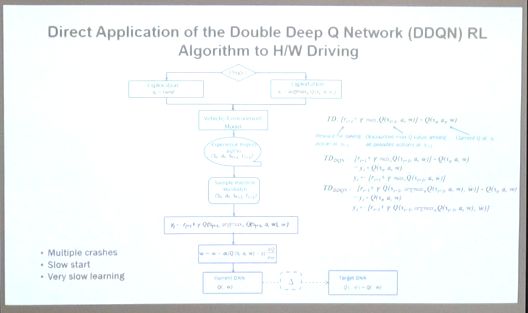
強化學習近些年變得很火熱尤其是谷歌的 Deepmind 推出了AlphaGo取得了成功,他們提出了 Deep Q Learning(DQN),現在幾乎成了強化學習的標準。在DQN算法中,我們建立了一個人工目標于是得到:
y與Q的差值可類比監督學習中的預測值與標簽的差值,由此得到的時域差用來更新網絡得到最優值。在此基礎上,Deepmind提出了三個主要的改進形成了double DQN,首先是提出適合多層神經網絡的Q函數;第二他們提出一個采樣任意的minibatch的方式處理訓練網絡的數據;第三個則是他們提出了兩個Q函數分別為當前Q函數和目標Q函數來更新網絡,這些改進使得強化學習更加穩定。
然而,當福特直接使用這些方法是發現訓練神經網絡經常容易失敗并且訓練速度很慢。因此他們加入了一些常識性的規則,當發現行為不安全時,將安全的行為加入網絡,對碰撞的判別會混合到采樣隨機minibatch中用于網絡的更新,最終結果取得顯著性效果。
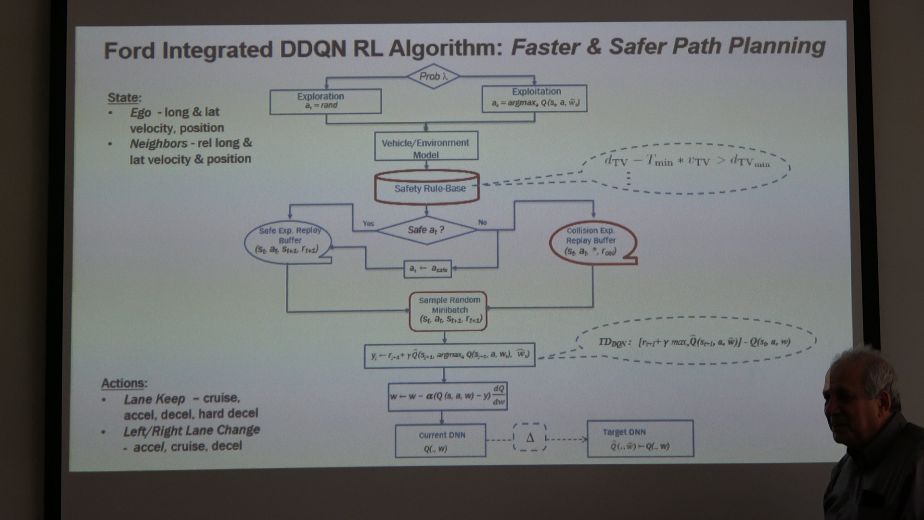
在強化學習中,應該不僅僅依賴于對數據這些短期性的經驗的學習,一些常識性的長期經驗規則的使用也很重要。
當前智能駕駛汽車算法和解決方案面臨的挑戰如下:
1、能學習特定駕駛員和環境、擁有最少的手工標定和標簽數據的車載或者云平臺的實時解決方案;
2、相比較監督式學習更傾向于無監督和半監督強化學習;
3、包含認知信息和物理模型的混合AI算法;
4、AI算法可解釋、可驗證;
5、擁有魯邦特性并且可以自評估;
6、維護成本低。
下面介紹一些有效的解決方案,每當我們遇到一個復雜系統時,我們會努力學習用一些復雜函數去近似這個系統例如神經網絡,這是其中一種方法。另一種方法使用許多簡單的小的子系統進行組合模擬復雜系統。
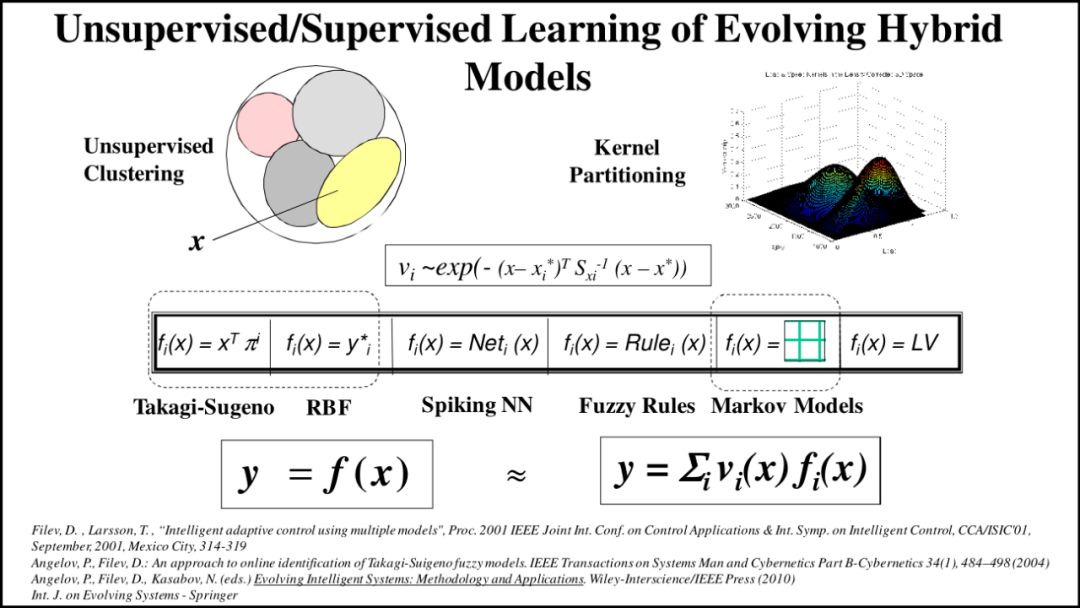
非監督的演化聚類算法可以實現實時的學習對系統的狀態空間進行預測,一個重要的例子是對引擎特性具有自適應標定和控制能力的在線空時濾波器。混合馬爾科夫模型對于目的地和路徑的預測也是非常有效的。神經網絡的可解釋性是近年來的熱點話題,強化學習可以使用神經網絡將狀態空間映射到行為空間,這是個非線性映射。這種非線性映射可不可以使用其他的映射來近似并且時刻解釋的呢?
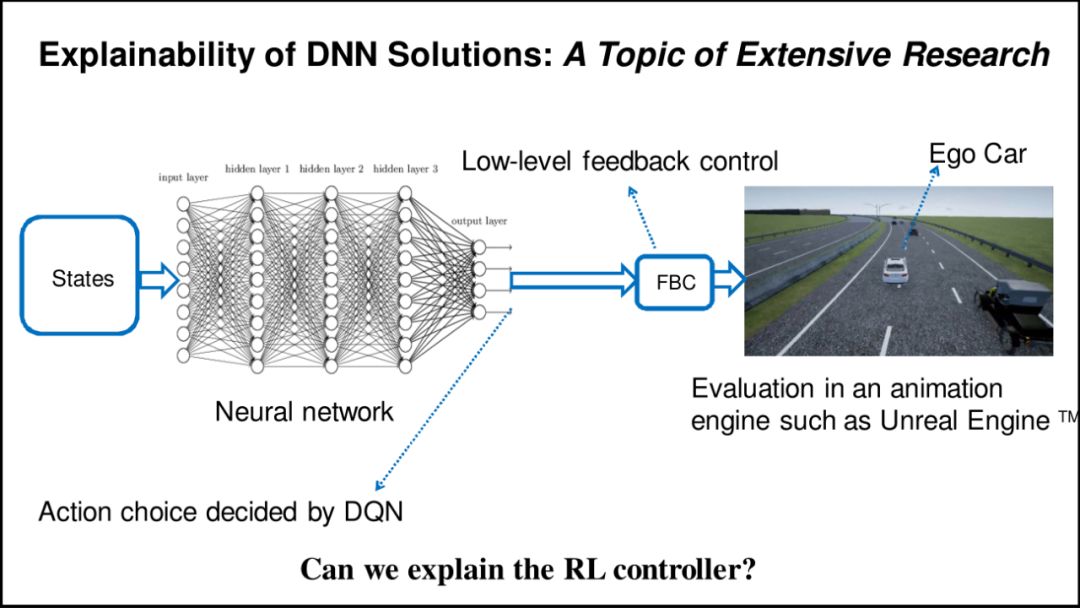
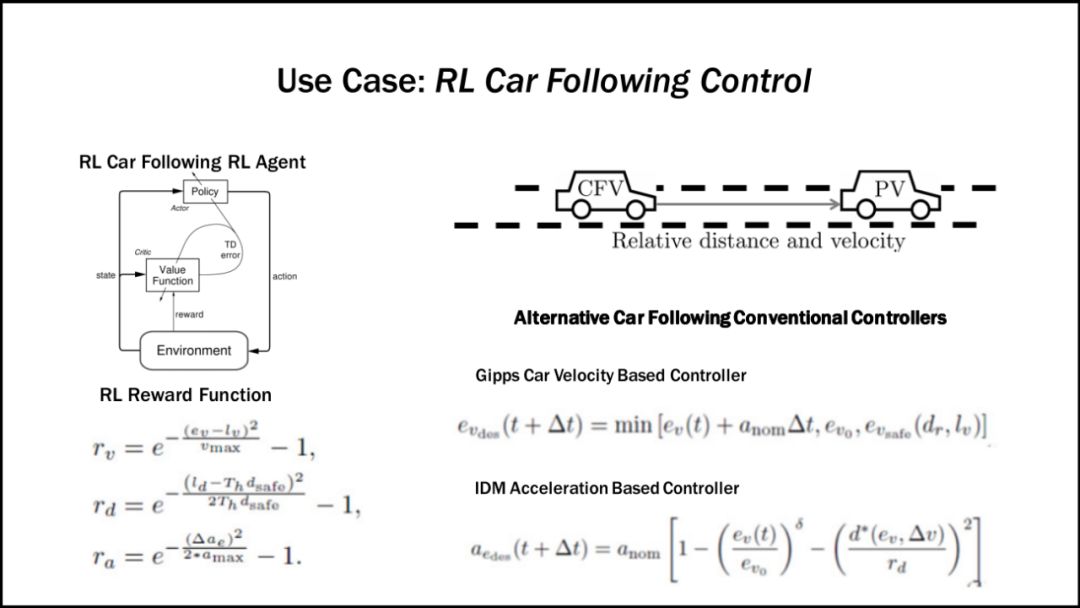
基于強化學習的控制器將狀態空間映射到行為空間,而使用模糊控制器基于規則的模型則是一種通用的近似器,通過將強化學習Agent仿真為黑盒子動態系統,它可以被有限級的“if-then”規則近似和解釋。以強化學習車輛跟蹤控制為例,跟車問題基本是是一種自適應巡航問題,后車需要保持與前車的安全距離、控制好各自的車速以及加速度,傳統方法中車速控制器基于吉布斯分布、加速度控制器使用智能駕駛模型(Intelligent Driving Model,IDM)建模,福特使用強化學習,分別建立速度、加速度以及距離的獎勵函數,最大化獎勵函數得到的結果達到甚至超過傳統方法。
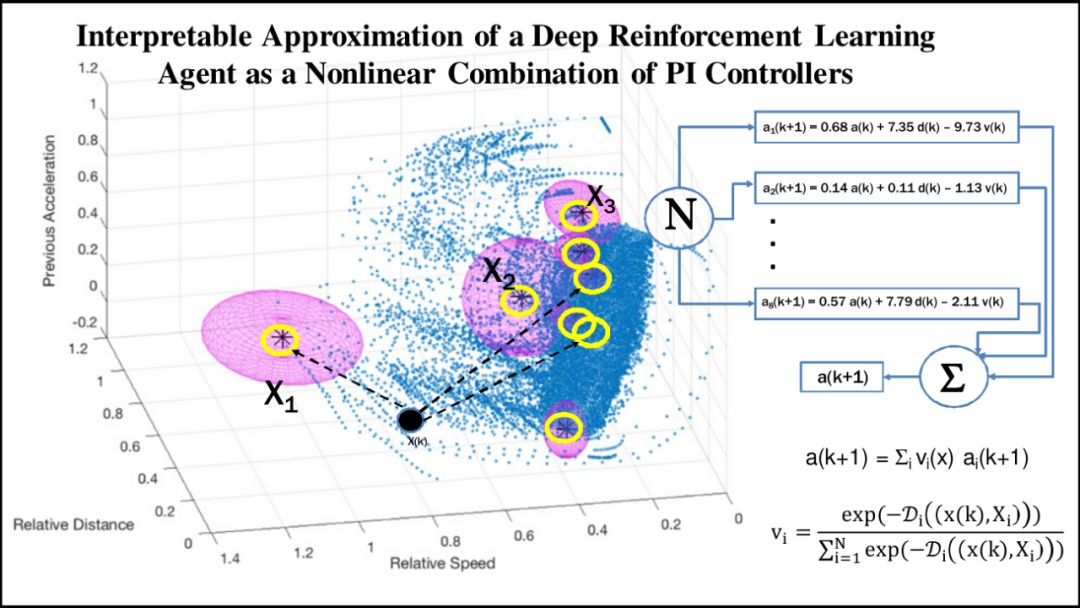
在得到加速度結果后,他們使用聚類算法以相對速度和相對距離作為輸入,預測加速度作為輸出,對數據進行聚類來近似強化學習控制器,強化學習器被近似為可解釋的PI控制器的非線性組合的形式,組合系數為各數據點到聚類中心距離負值的Softmax函數。
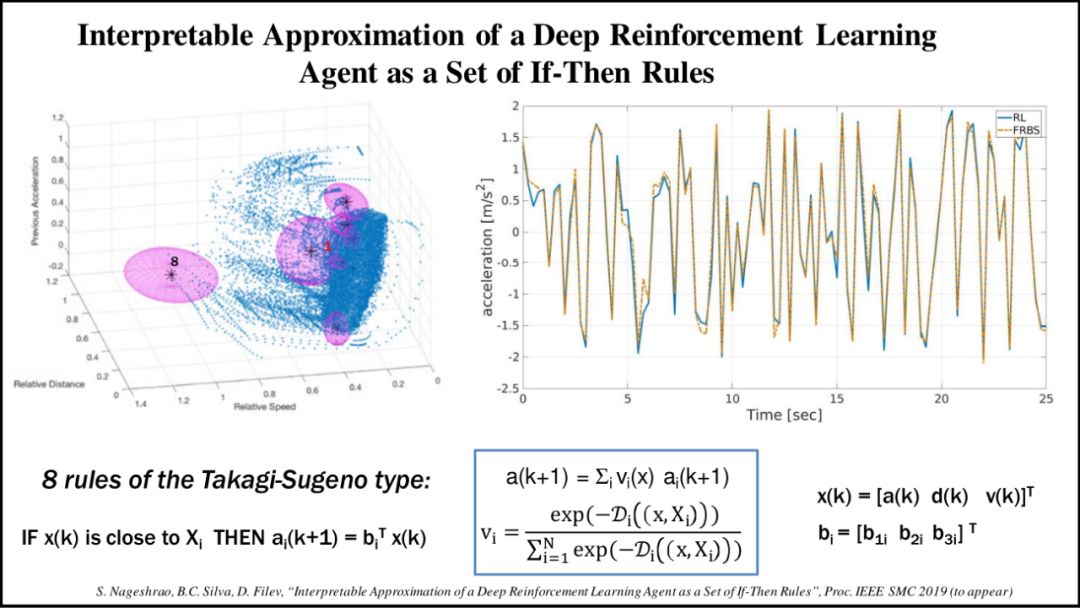
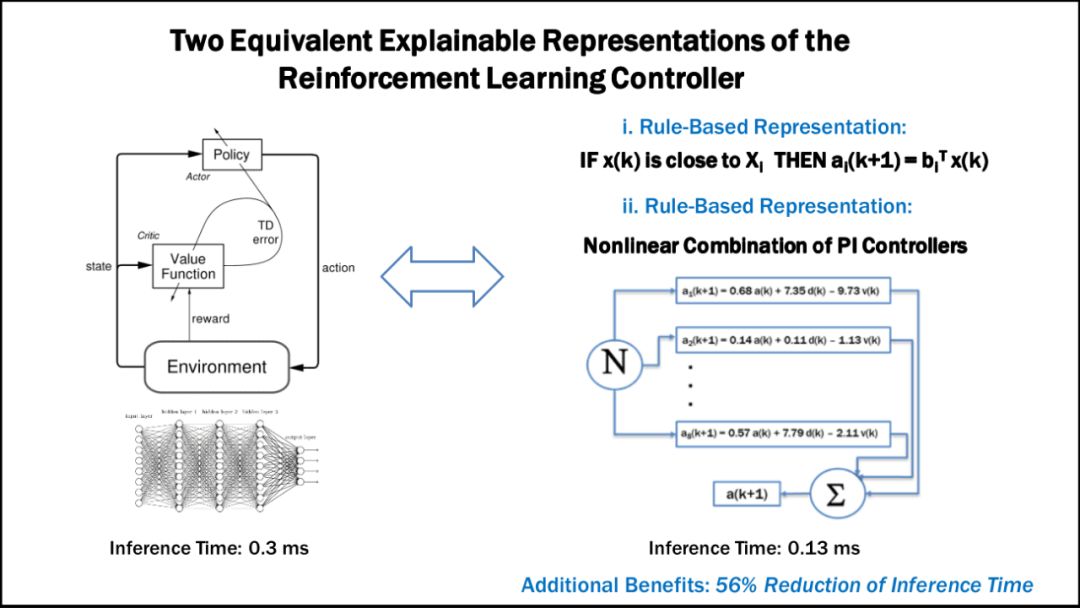
擬合效果基本達到原始強化學習其的性能,但是推理時間從強化學習器的0.3ms降低到了非線性組合的0.13ms。最后,對演化系統地總結如下:
1、使用演化聚類和核粒化的方法講一個復雜系統實時分解為多個相互重疊的子區域;
2、實時同步學習系統架構以及局部子系統的參數;
3、對具有多個操作模式和多元化行為的系統實時建模;
4、特定的機器學習技巧(無監督聚類與監督學習的組合);
5、反映人類從現實中學習、總結、管理知識的能力。
我們在此提到的演化系統是多個子系統的組合,它的功能非常強大,包含了監督學習方法和非監督學習方法,可應用在實時的無人駕駛大數據處理中。大數據、物聯網以及AI技術的快速發展為智能汽車提供了更多的解決方案,AI算法則需要具備更多的人性化、自適應和最小標定以適應嵌入式實施的需求也很廣泛,智能汽車的發展為傳統AI算法的改進提供了新的發展方向,傳統AI算法應與基于規則的系統、認知知識和基于第一性原理的模型相結合,此外,認知模型對統計機器學習的近似使得傳統機器學習算法變得可解釋和性能的可升。
-
智能汽車
+關注
關注
30文章
3067瀏覽量
108269 -
智慧交通
+關注
關注
5文章
758瀏覽量
27354
原文標題:美國國家工程院院士、福特技術研究員 Dimitar Filev : 用于智慧出行的智能車輛系統
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于RFID技術的智能車輛出入管理體系及安全保障措施

Nordic NRF54無線SOC: 助力電動出行無限可能.
藍牙AOA定位技術:開啟車輛精準定位的智能新時代
智慧交通系統:重塑城市出行體驗
乾瞻科技全新汽車IP解決方案亮相,助力智能車輛與自動駕駛應用
復雜環境下多無人智能車輛協同調控
人工智能在智慧城市建設中的應用
智能駕駛在共享出行中的作用
智慧交通:科技保障出行安全
構建智慧出行新生態:場站網約車管理系統的創新應用





 工商網監
工商網監
評論