 關于電機反饋回路傳感器的選擇分析
關于電機反饋回路傳感器的選擇分析
作者:Bill Schweber 貿澤電子
在很多電機控制應用系統中,隨時監測電機轉子或者負載的位置、速度設置包括加速度等參數是非常有必要的。根據應用和設計的要求,電機控制器需要精確的知道這些參數或者了解大概的參數信息。只有知道電機的情形和轉子的狀態,電機控制器才能夠形成一個閉環控制系統,如圖1所示。

圖1:很多電機管理和控制應用中集成傳感器并且提供轉子位置和速度的實時信息是組成一個高效的閉環反饋系統非常必要的,這樣才能保證可靠的系統性能。(來源:Bill Schweber)
當然,電機的速度、位置和加速度是緊密聯系的。因為速度的位置的導數(隨時間的變化率),加速度又是速度的導數,只要知道其中一個參數,我們就可以確定所有三個參數(注:速度是加速度的積分,位置又是速度的積分)。
然而在實際情況中,由于分辨率和噪聲等因素這種確定相關參數的方法往往顯得捉襟見肘。例如某個方案的參數設計可能完全不適合另一個應用場景所要求的分辨率要求。不同的應用對于分辨率和精確度的要求從粗糙到中等以及精確都是有可能的。比如數控機床就需要精確的轉子信息,汽車電動窗控制器使用近似數據就可以了,洗衣機或者烘干機采用粗糙的數據就能實現功能。
閉環
為了感測轉子的位置或者運動參數,最常見的方法就是旋轉變壓器、光電或者電容編碼器、霍爾效應器件等,按照精度、分辨率和成本因素大致降序排列。這些傳感器在物理設計、實現和電子接口方面存在很大的不同,所以對于使用者來講必須清楚自己的需求,這樣才能確定應用采用最好的選擇,最終將傳感器完美的接入到控制器的電路中。
增量編碼器(用于采集相對位置參數以及控制成本)通常與交流感應電機搭配使用。相反的是絕對編碼器(電機的每個位置都會給出不同的二進制數據,可以絕對的確定軸位置信息)通常與永磁無刷電機搭配使用,在伺服應用系統中廣泛采用。當然這些應用是確定需要使用增量或者絕對參數信息的主要因素。
盡管大多數的電機控制采用數字控制回路,但是實際情況是如果傳感器信號是模擬的那么需要轉換為數字信號,又或者數字信號(如電壓和其它屬性)與標準的數字電路不兼容。反饋回路中的傳感器一般能提供“原生”輸出數據,我們可以進行自定義轉換,有些還具備條件化的即插即用的數據輸出,這與標準的I/O接口、格式和協議向兼容。
盡管更高的分辨率看似是好的,但是在實際應用中卻不一定。分辨率太高可能會拖慢整個系統的性能,因為系統需要處理更多的數據信息,但是很多數據是不需要的或者是沒任何用處的,所以說滿足系統需求的最低分辨率對系統才是最好的選擇。
“現在就提供幾種解決方案…”
分解器是非常精確、可靠、絕對位置參數傳感器。它是基于變壓器的基本原則來設計,一個主繞組和兩個二次繞組,互相正交放置(夾角90度),如圖2所示。一次繞柱和二次繞組之間的有效匝數比和極性夾角是根據轉軸的角度確定的。一次繞柱通過交流信號并且保持常量,信號頻率范圍從50/60Hz到幾百KHz,二次繞組的輸出會根據實際的放置位置有一定的移相。二次繞組的峰值電壓隨軸的轉動而變化,并且與軸角度成正比。采用主繞組信號為參考來解調這些電壓輸出,分解器能夠提供高分辨率的軸角度參數輸出。
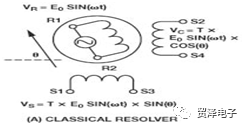
圖2:分解器采用一個主繞組和一對二次繞組,正交放置;需要交流勵磁和解調,但是非常精確、可靠,上電后能提供絕對位置數據信息(圖片:ADI.inc)
分解器不僅很精確也很牢固可靠。主繞組和二次繞組之間沒有直接的物理接觸,除了電機本身設計之外沒有單獨的電刷和軸承,不會存在任何摩擦導致零件磨損,也不會有任何雜物(如油)干擾機器運行。分解器通常被用在極具挑戰性的情況下,如軍事槍炮的射擊角度測量,因為它的機械設計非常牢固,性能很高。
然而相對于其他的選擇,分解器一般體積較大而且成本比較高,功率消耗相對也比較大,對于一些低功耗應用是不能夠接受的。而且為了生成和解調交流信號還需要復雜的電路設計,盡管我們可以使用一些IC芯片來簡化電路但是效果還是有限的。上電后就能提供絕對位置參數數據,不需要其他操作來確定初始轉軸角度,當然這個特性在一些應用中是必備的,而一些應用則可能完全不需要。
對位置進行編碼,而不是數據
增量位置讀取采用的光電編碼器(這里“編碼器”與數字數據編碼無關)采用一個光源(LED)、兩個正交的光電傳感器和一個玻璃或者塑料材質的轉盤,如圖3所示。轉盤上具有相對幾何中心精細的刻度線,當它轉動時傳感器能識別到明暗的光線變化。
轉盤上刻度線的數量和其它一些技術決定了光電編碼器的分辨率,一般有1024,2048以及更高的4096。與變壓器式的分解器不同的是,光學編碼器不是被廣泛使用的器件,直到長壽命的LED和高效傳感器的出現。
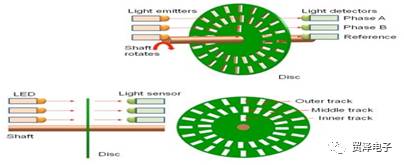
圖3:光學編碼器采用一個光源、兩個正交放置的光傳感器和一個帶有刻度線的轉盤組成;體積小、功耗低,非常容易接入到電路中,提供的性能和功能也是非常強大的。(圖片:國家技術提升計劃,由印度政府出資開展的一個國家級項目)
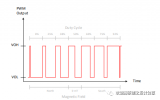
傳感器的擺放位置讓編碼器確定轉動方向,兩個傳感器(A和B)輸出的信號脈沖通過一個簡單基本的電路進行轉換生成一對比特流信號,分別表示動作和方向,如圖4所示。
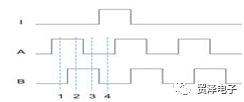
圖4:A和B信號夾角成90度,光學編碼器的輸出與很多運動控制處理器的I/O接口兼容。(圖片:Bill Schweber)
然而這個編碼器是一個增量式編碼器,而不是絕對的,僅表明運動信息。為了能夠確定決定位置信息,大多數編碼器增加了第三方傳感和光電傳感器,作為零參考位置指示。轉軸的轉動角度必須足夠大,超過零參考位置才能輸出這個信號,當然也有方法讓光學編碼器可以增加相對位置信息數據輸出,但是這樣會增加該單元電路的復雜度。
光學編碼器能夠提供非常好的分辨率,但是它們沒有分解器那樣堅固。灰塵會影響光線路徑同時編碼器的轉盤也會布滿污垢。但是它的性能完全能夠滿足很多應用的需求,而且尺寸小巧、重量輕、低功耗、方便接入并且成本相對較低。
電機和旋轉應用采用的傳統光學編碼器與HEDS-9000和HEDS-9100很相似,這兩款是Avago科技公司(Broadcom)推出的雙通道模塊單元。這些高性能、低成本的模塊包括一個LED光源以及鏡頭和一個檢測器IC,封裝在一個小型C形狀的塑料殼內,還設置了驅動和電子接口,如圖5所示。它們具備精準的光源和光電檢測器的放置,所以即使外面的安裝偏差也不會太影響它的性能。
圖5:Avago出品的HEDS-9000和HEDS-9100雙通道模塊,尺寸小巧,安裝靈活;其中的刻度轉盤可以根據實際應用的分辨率要求分別訂購。(圖片:Avago科技/Broadcom)
注意這個轉盤,稱為編碼盤,可以獨立訂購,適用于HEDS-9000的分辨率有500CPR和1000CPR,HEDS-9100可以在96CPR和512CPR分辨率之間選擇。這個模塊能提供雙通道TTL兼容的A和B數字信號輸出,支持5V供電,如圖6所示。
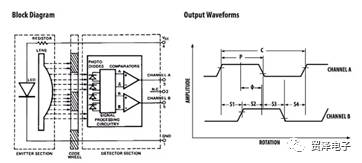
圖6:Avago出品的HEDS-9000和HEDS-9100雙通道模塊,尺寸小巧,安裝靈活;其中的刻度轉盤可以根據實際應用的分辨率要求分別訂購。(圖片:Avago科技/Broadcom)
除了光學編碼器還有一個選擇方案,基于電容原理而不是采用光學原理,如下面我們展示的CUI AMT10系列,圖7所示。這些編碼器在牢固性、高精確度、增量和絕對檢測模塊化的單元都有很多選擇,最高支持12位(4096個計數單元)的分辨率選擇,通過四個DIP開關進行設置,共有16種設置選擇。通過SPI協議接口可以接收A/B兩路正交的CMOS兼容的輸出信號。
圖7:CUI AMT10系列電容編碼器,外觀上看似光學編碼器,但是設計和使用原理是非常不同的。(圖片:CUI.inc)
與光學編碼器不同,CUI AMT系列器件在編碼器的活動與固定部分都使用了重復性的可腐蝕的導體材料。當編碼器旋轉時,兩部分之間的相對電容值會增加或者降低,這種變化在電容值上是非常敏感的,有些類似光學編碼器中的光電晶體管的信號輸出,灰塵和其它污垢不會造成任何不利影響。
當然我們要記住無論是分解器還是編碼器都是機械設備,我們需要考慮安裝以及電子接口要求。為了避免庫存問題,CUI公司為AMT10系列提供了多種外殼、蓋子和安裝基座,如圖8所示。因此同樣的一個編碼器可以應用到不同的轉軸直徑和安裝應用場景中。
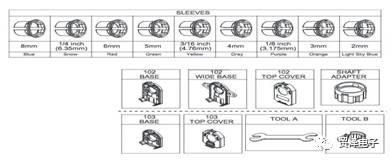
圖8:在實際應用中,編碼器需要能夠適用不同的轉軸和安裝情形;CUI公司提供了全面的安裝配件,采用不同顏色進行編碼識別,這樣單個編碼器就能夠在不同的應用場景中使用。(圖片:CUI.inc)
分解器和編碼器都能夠提供基本的數據輸出,分辨率可達每度的千分之一(每分鐘轉0.6弧度)或者更高,但是精確度和分辨率是不一樣的(一些應用中可能更關心其中一個方面)。無論設計中采用的是分解器還是編碼器,因為溫度、跟蹤速度的變化、意想不到的相移以及其它因素都會引起故障的產生,然而這些模塊的供應商會提供很多方法來消除、避免或者彌補這些缺點,通常會采用IC器件來實現對傳感器原始數據的處理,然后將過濾后的數據傳輸給系統控制器。
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764312 -
電機
+關注
關注
143文章
9263瀏覽量
148529 -
系統控制器
+關注
關注
0文章
11瀏覽量
8652
發布評論請先 登錄
Hall傳感器的原理、應用及分類
新手求助:關于測壓力的傳感器選擇問題,請各位大神幫忙
霍爾傳感器芯片選擇和使用的影響
如何選擇合適的傳感器 傳感器選擇指南

如何選擇壓力傳感器量程?如何選擇壓力傳感器接頭?






 工商網監
工商網監
評論