 機器學習實時預測公交延遲!谷歌地圖附加功能上線全球
機器學習實時預測公交延遲!谷歌地圖附加功能上線全球

據統計,全世界有數億人乘坐公交車進行日常通勤,世界上一半以上的交通都涉及公交,與地鐵等出行方式不同,雖然公交運輸公司有提供公交線路的發車時間表,但是公交車的運行時間會受限于實時的路況、路面上的交通指示燈等。這對于依靠公交車通勤的人來說,不確定的等待時間無疑會影響乘車的心情。
近日,谷歌地圖的附加功能做到了!在之前應用的基礎上引入了公交車的實時交通延誤,預測了全球數百個城市的公交車延誤情況,從亞特蘭大到薩格勒布,從伊斯坦布爾到馬尼拉等等,這提高了六千多萬人的通勤時間準確性。
在了解原理前,隨文摘菌看下這款附加功能的演示吧!
印度首發!公交延遲實時了解
該系統于三周前首次在印度推出,由機器學習模型驅動,該模型將實時汽車交通預測與公交線路和站點數據相結合,以更好地預測公交車行程需要多長時間。以下的動圖很好地演示了谷歌地圖中的這項附加功能:
動圖中展示了從當前位置到arsd(印度地名)的實時公交狀況,與以往的搜索結果不同的是,在首頁中,添加了紅色字體的延遲時間。
點開之后可以看到公交線路情況,紅色的部分表示有延遲,藍色部分表示正常通行,后續其他演示功能,詳見下方鏈接:
https://india.googleblog.com/2019/06/stay-informed-about-local-bus-and-long.html
數據從哪來?沒有公交實時數據也可以!
在沒有來自公交機構實時預測數據的許多城市中,開發者借鑒了用戶采用的一種巧妙的解決方法——使用谷歌地圖的行車路線,考慮到公交運輸的特殊性:加速,減速和轉彎需要更長時間; 有時候甚至還有特殊的道路特權,比如公共汽車專用車道,所以此方法只適合粗略估計。另外研究者還結合了之前項目的數據庫和來自用戶提供的數據來擴充訓練語料庫,使得模型能夠擴充到多個城市更加細粒度的公交線路。
如何建立模型?
為了構建開發模型,在參照公交機構發布的信息基礎上,開發人員結合了一段時間內從公交車位置序列中提取的數據,同時也有考慮到公交線路上其他車輛的行進速度。
整個模型分為一系列時間軸單元 - 途經的街道路線和停靠站 - 每個單元對應一條公交車的時間線,獨立地預測一段延遲,最后的輸出是每個單元預測的邏輯求和。其次考慮到一些特殊情況,如:站點之間不頻繁的通信、公交車車速較快、較短的街道路線和停靠點等,所以相鄰站點之間的預測通常要跨越多個時間單元,以便綜合考慮到各方面的因素,下面的圖片很好地詮釋了建立模型的過程:
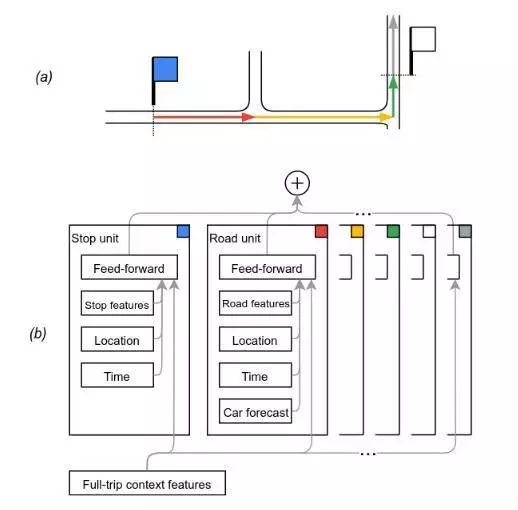
(a)圖中藍色的圖標表示站點,公交車在此開始啟動,在(b)圖中將藍色的站點抽象成Stop unit的時間單元,包括發車時間表Time、位置信息Location、站點周圍的狀況Stop features以及向前行進Feed-forward等一系列特征;
(a)圖中的紅色、黃色和綠色的線路表示公交車的行進路線,同理每個路線抽象建模成Road Unit,除了一些共有的Time、Lacation、Feed-forward特征外,還加入了路況信息Road features、以及路線上的其他車輛的速度預測Car forecast等信息。
模型包含了上下文場景的預測信息,最終的結果是這些時間單元的邏輯求和。這種時間序列的建模結構非常適合neural sequence model(神經網絡中的序列模型),最近成功應用于語音處理、機器翻譯等。一般情況下使用標簽數據(X,Y)(輸入數據為X,輸出數據為Y)的監督學習任務都需要使用序列模型,如在NLP領域內大放光彩的RNN模型,也是序列模型的應用。
考慮到汽車速度的影響
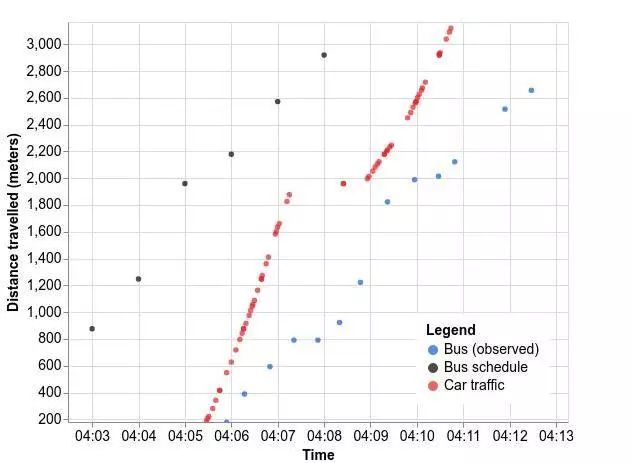
舉例說明Car forecast對Road unit時間單元的影響,我們以周三下午乘坐Sydney(悉尼)的巴士為例。 公交車的實際運行狀況(藍色的線路)比公交運輸機構公布的時間表(黑色的線路)滯后幾分鐘,從下圖可以看到, 紅色的線路也就是汽車的運動狀態確確實實地影響了公交車的前行。
例如,明顯看到圖中紅色標記在2000米處的斷層和斜率的變化,這預示著汽車2000米處的減速,這一減速也同樣體現在了藍色的公交線路上,同樣地,800米處的暫停,公交的停滯時間要比汽車長很多。
上文已經舉例說明了汽車車速對公交車行進途中造成的影響,那么,如何將Car Speed(汽車速度)轉換為公交速度呢?
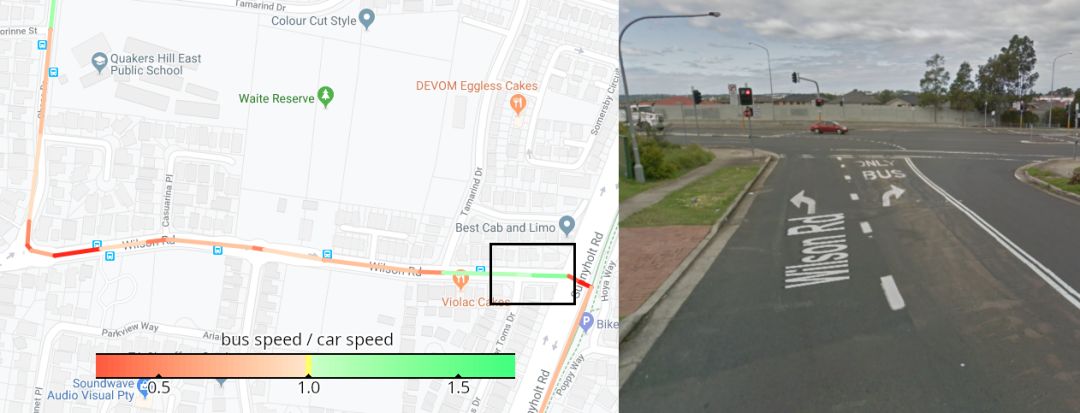
在下圖的左側部分,模型對公交車行駛速度和汽車速度之間的預測比率進行了顏色編碼。 較慢的紅色部分,對應于停靠點附近的公共汽車減速。 至于速度較快的綠色部分,我們從右圖StreetView中看到了一個只有公交車的轉彎車道。(附:這條路線在澳大利亞,右轉彎比左轉慢,其他模型可能會欠缺這些細節方面的考量)
捕捉不同地區線路的差異
不同城市、社區和街道都有其獨特性,那么模型如何捕捉這些差異呢?
為了使模型捕捉到更加細節的信息,開發者讓模型學習不同大小區域的表示層次結構,以及每個時間軸單元的地理位置(道路或站點的精確位置),這些位置的表達,通過在時間軸單元中嵌入不同大小區域的位置表示,最終邏輯求和得到。
剛開始模型的訓練,對特殊情況下的細粒度位置進行強化學習(對模型預測結果進行反饋評估),調整模型參數,使得模型能夠更好地學習特征,并使用結果進行特征選擇。 這樣就可以確保考慮到百米內的更加全面的道路信息。
位置和時間相結合:適應不同城市的“節奏”
除了考慮到不同位置線路的獨特性外,每個城市都有其不同的節奏,對于節奏較慢的小鎮,下午6:30到下午6:45可能是偏安靜的黃昏與日落,對于其他的城市可能是下班高峰期或用餐時間,因此需要在模型中嵌入時間表示。
在模型中嵌入當地時間和星期幾這些時間表示,同時結合地理位置,可以捕捉到各城市高峰時段的公交線路,這是之前模型的又一個擴充。
這種擴充使得數據變成四維(星期幾,幾時,城市名稱,站點),四維的數據很難可視化,為了更直觀地解釋,利用下圖藝術家Will Cassella設計的圖片,來講解四維中的其中三維數據:
晝夜更替,這種循環往復,使得模型的時間表示為一個類似鐘表的“Loop”結構,但是細心地讀者可能會發現這種鐘表的盤面形成了很多的“褶皺”,這也是時間模型設計的精髓。這種“褶皺”結構可以在神經網絡訓練過程中,讓神經元區分“半夜”“深夜”這樣的概念。除此外,鐘表盤面上16到21的刻度上有很大的“彎曲”,而2到5的刻度則表現的很“平坦”,這也體現著不同時段公交的擁堵情況,16到21的刻度代表著下午4點到晚上9點,而2到5的刻度則表示半夜或者是下午的時間。
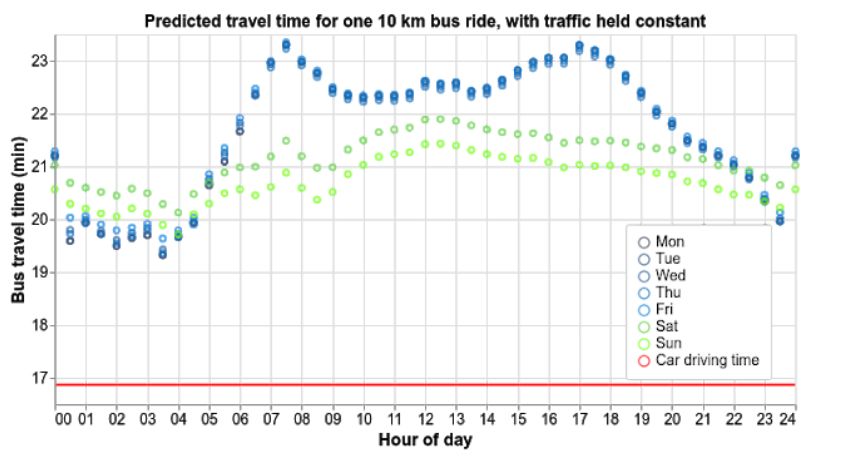
這種時間結構的設計,使得汽車速度是常量時,設計的模型也能感知到公交車的高峰擁堵情況,以New Jersey乘坐10km的公交巴士為例,模型呈現的效果如下圖,從圖中可以看到周一到周日每天特定時刻的公交運行時長,耗時較多的時刻集中在一天的7點到8點,也就是早高峰,同時17點到18點的Bus travel time也稍有上浮。
模型效果:讓數據“開口”證明
在訓練好模型后,模型對Sydney(悉尼)的公交擁堵情況進行了實時的預測:
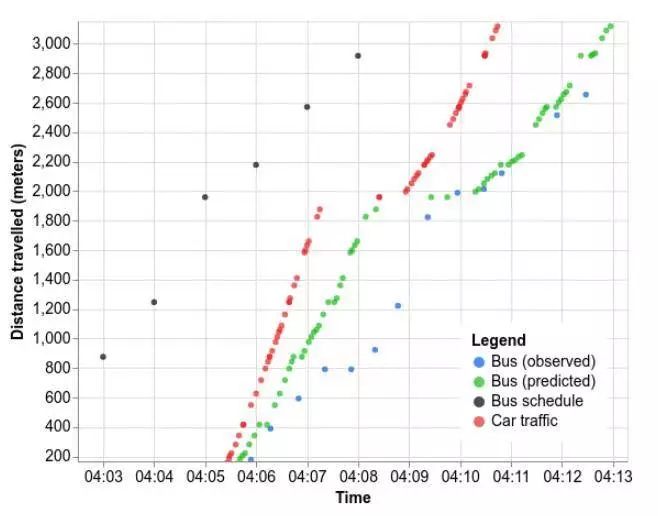
圖中藍色的線路是真實的公交行進狀況,綠色的線路是預測后的公交運動路線,可以看到真實情況下,公交在800米處有大約半分鐘(30s)左右的停車,預測模型有感知到差不多10s的停車,這有些許的誤差,統計完后,整個模型的預測結果與真實的效果只差1.5分鐘,這已經非常貼近真實值了。
預測不同城市的高峰時段
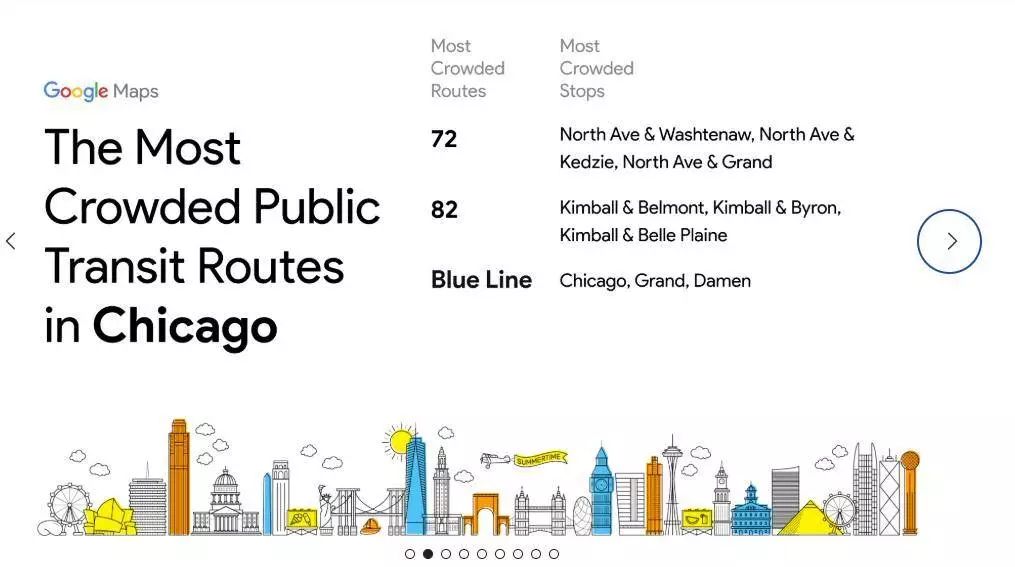
除了對Sydney(悉尼)的預測外,模型也對全世界各大城市的交通擁堵狀況做了統計。
下圖是對Chicago最擁堵的公交線路和經停站的統計:
-
谷歌
+關注
關注
27文章
6231瀏覽量
108004 -
機器學習
+關注
關注
66文章
8500瀏覽量
134503
原文標題:機器學習實時預測公交延遲!谷歌地圖附加功能上線全球
文章出處:【微信號:BigDataDigest,微信公眾號:大數據文摘】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
一文讀懂:嵌入式Linux實時性進階
鴻蒙地圖功能開發【3. 代碼開發】##地圖開發##
鴻蒙地圖功能開發【1. 開發準備】##地圖開發##
邊緣計算中的機器學習:基于 Linux 系統的實時推理模型部署與工業集成!

預測性運維管理平臺是什么?有什么功能?
英特爾酷睿Ultra處理器助力亦心AI閃繪本地功能上線
微軟預覽版Copilot Vision AI功能上線
聲智AI播客功能上線
飛凌嵌入式「在線文檔」功能上線 | 開放靈活,盡在掌握

電子地圖的主要功能與應用






 工商網監
工商網監
評論