TCP通信通過網絡調試助手與S7-1200建立TCP連接
S7-1200 V4.5 版本開始支持網絡視圖組態開放式用戶通信連接,不需要在程序中調用 TCON ....
添加HMI設備的步驟介紹
2. 指定名稱并選擇一個 HMI 設備。 保留“啟動設備向導”(Start device w....
Sivarc畫面規則:建立程序塊與畫面的鏈接
7) 完成后,可以看到在HMI中自動生成一個畫面,名稱為“B_DB”,查看是否與程序塊B的背景數據....
PLC程序無法下載診斷的原因有哪些
本例子的CPU為6ES7 315-2EH14-0AB0,查看CPU技術規范,可見M區最大數目為204....
KUKA編程中$FCT_CALL的存在
字符“a”將通過命令通道 $FCT_CALL 寫入文件MyTest.TXT。如果文件已經存在,則在打....
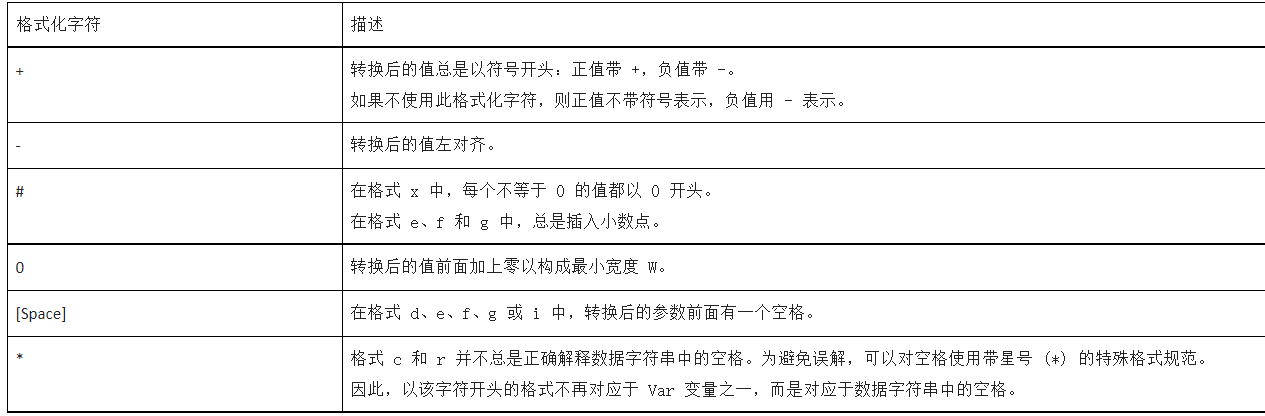
KUKA機器人高級編程SWRITE的用法
在數組的情況下,規范“Z”可用于定義要考慮的數組元素的數量。如果沒有為“Z”指定值,則考慮所有數組元....
KUKA機器人中-TCP通訊里的純理論的東西
CAST_TO使得使用單個CWRITE語句處理多達4 KB的數據成為可能。CAST_TO將單個變量分....
通過openness功能啟動SiVArc服務
確保傳遞有效的 GenerationOption 參數。如果未傳遞參數,將生成 SiVArc 并為 ....
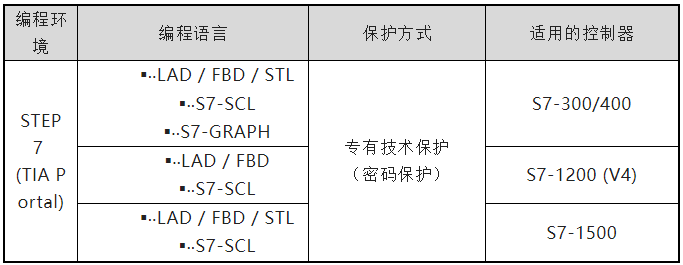
使用TIA Portal進行工程設計的開放接口
TIA Portal Openness V16 中提供了以下新功能和創新。您可以在產品文檔的各個部分....
KUKA系統變量:$ERR
ON_ERROR_PROCEED 可用于抑制由以下程序行觸發的運行時錯誤消息。機器人控制器跳過觸發錯....
KUKA編程:命令通道$FCT_CALL的功能
對于使用 CWRITE 的每個函數調用,都要進行檢查以查看函數是成功執行還是因錯誤而中止。如果發生錯....
電動機溫升過高的原因
如電動機在陽光下曝曬,環境溫度超過40℃,或在通風不暢的環境條件下運行,會引起電動機溫升道高。可搭簡....
讀取KUKAC4.8.3系統機器人軸參數!
SGL_SSD_ERROR(OWNER_NAME[], OWNER_AXNAME[], VAR_NA....
KUKA一套程序的建立(序列)
機器人控制系統等待上一級控制系統給出“程序啟動”(SRB)的信號。在該信號給出后則啟動此序列程序。
數據日志的使用
在目標 CPU 的設備配置中啟用 Web 服務器,“設備視圖”→“鼠標選中CPU”→“屬性”→“We....
S7-1200如何創建AT覆蓋變量
創建一個 S7-1200 的項目,在程序塊中新建一個 FB 塊(或者 FC 塊),右擊 FB 塊進入....
KUKA工具之CZ電伺服鉚鉗ECKOLD技術
鉚接是用鋼、鋁或不銹鋼制成的板材和型材的連接技術。?鉚接技術允許通過局部冷成型連接兩個或多個細金屬板....
電機/制動器啟動程序激活
顯示啟動助手。按照啟動助手的說明進行操作。您可以使用 [back] 和 [next] 按鈕在對話框之....
滾床控制SEW變頻器MOVIfit的PLC控制
將帶PROFIsafe選件S11的MOVIPRO與DC24V電源連接后,必須用MOVITOOLSMo....
數據塊(DB)的結構
實例數據塊是指派給特定功能塊的數據塊。它們功能塊的指定的本地數據。當FB被用戶程序調用時,這些數據塊....
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入門
Modbus數據在TCP/IP以太網上傳輸,支持Ethernet II和802.3兩種幀格式,Mod....
標準PLC數據類型 (UDT)之間的差別
要創建 F 型 PLC 數據類型 (UDT) ,請啟用“添加新 PLC 數據類型”(Add n....
命令通道$FCT_CALL 的功能
默認情況下,函數訪問的文件存儲在本地目錄C:KRCROBOTERUserFiles。存儲在那里的文件....
MCR(主站控制繼電器)依存
只有在將中間輸出線圈置于激活的MCR區內時,才會激活MCR依存關系。在激活的MCR區內,如果MCR處....
S7-300輸入模塊SM321是否支持連接NPN和PNP接近開關?
除了問題1中所述,可以考慮使用分布式IO站點中采用分布式IO模塊;根據不同型號區分是否支持NPN或P....
SCL-添加接通延遲定時器
對于指令地址,請選擇“Run” 變量。在“指令”(Instruction) 任務卡中,展開“定時器....
PROFINET接口實現開放的ISOonTCp通信
要通過S7-PN CPU的集成PROFINET接口實現開放的ISOonTCp通信,不能再硬件組態中完....
KUKA激活轉矩運行:SET_TORQUE_LIMITS
如果一個極限已設定 (或兩個)并且然后設定另一個極限,和現在通過新的極限得出一個空的區間,則新的極限....





 工商網監
工商網監