 電子發燒友App
電子發燒友App


摘要:為了擴大粉塵測量儀的測量范圍,采用一種自適應的測量方法,即根據被測環境粉塵的濃度自動調節傳感器的接收靈敏度,并結合相應的軟件算法,使高、低濃度的粉塵都能得到有效測量。在設計過程中運用PID算法對測量過程進行控制,使測量儀在運行中進行實時調節,以降低測量數據的振蕩。通過對煙霧釋放出粉塵的濃度測量,運用Matlab對測量數據進行擬合,得到了平滑的響應曲線。實測結果表明,該方法有效地擴大了測量范圍,使測量范圍達到了0.01~48 mg/m3。
關鍵詞:自適應;粉塵測量;PID;數字濾波
隨著我國現代工業的發展,空氣中粉塵的污染越來越嚴重。目前我國一些環保部門仍采用“濾膜稱重法”測量粉塵濃度,這種方法不能實現在線連續測量,且測量誤差較大。國外均采用基于光散射理論的在線測量,該技術已非常成熟。目前我國也展開了基于光散射測量粉塵技術的研究,但與國外技術相比,還有很大差距。在多年對光散射法測量粉塵濃度的研究中體會到這種方法的測量范圍小,儀器數據顯示不穩定,本文提出一種自適應測量方法,通過實驗驗證,該方法能有效擴大測量范圍,減小振蕩。
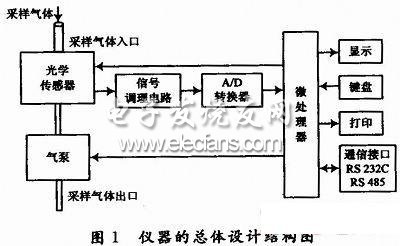
1 儀器的總體設計
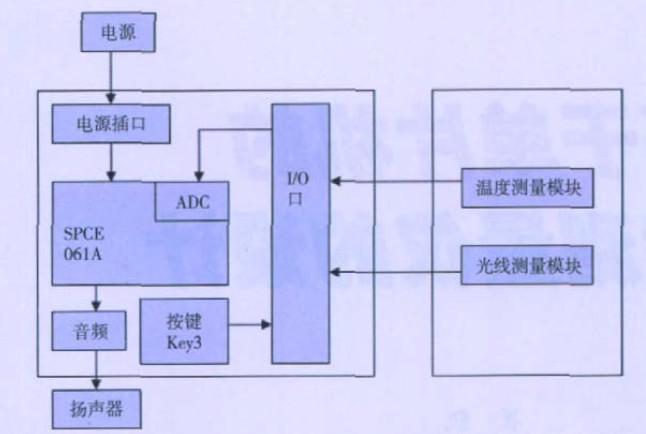
測量儀主要由光學傳感器、氣路系統、光/電轉換、放大器、A/D轉換、微機控制與管理系統、電源系統組成,其總體結構如圖1所示。儀器的工作過程如下:
?
由半導體激光器發出的光波穿過具有粉塵的被測區域后,光學傳感器將接收到的光信號轉換成電信號。為確保能對信號直接進行A/D轉換,提高信號的抗干擾能力和儀器的靈敏度,還必須對信號進行調理。調理后的電信號通過A/D轉換后再傳送到微處理器,通過微處理器對數據進行處理分析再顯示。
2 自適應測量的實現
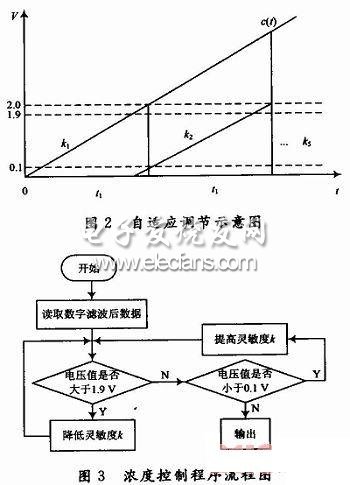
2.1 自適應調節原理
采用一般傳感器測量粉塵濃度,其測量范圍約為0~3 mg/m3。為保證高濃度和低濃度的測量準確性,擴大儀器的測量范圍,本文提出了一種通過調節傳感器接收靈敏度來實現自適應調節的算法(調節原理如圖2所示),即當被測環境的粉塵濃度較低時,提高傳感器的接收靈敏度;當被測環境的粉塵濃度較高時,降低傳感器的接收靈敏度,并通過實驗對這種方法進行了驗證,圖3是軟件控制流程圖。
?
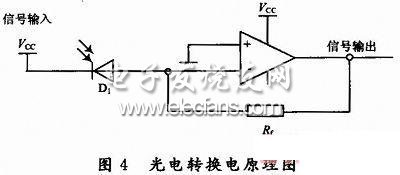
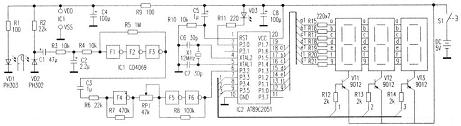
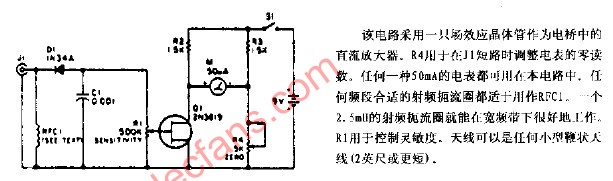
2.2 實現電路
圖4是光電轉換原理圖,Rf是程控的電阻調節網絡,通過對Rf值的調節,改變傳感器的接收靈敏度,使不同信號值均能得到有效測量。其功能實現如下:當儀器進入測量時,微處理器發出控制命令,使傳感器處于接收靈敏度最高狀態。讀取數據后判斷傳感器是否處于最佳工作狀態,若發現溢出或不在最佳工作狀態,則改變傳感器的接收靈敏度,使其進入最佳的工作狀態。為了使測量數據統一,通過軟件對測得的數據進行修正。
?
3 測量數據的控制與處理
3.1 測量數據的濾波處理
該測量儀是數據更新率較高的實時系統,為克服采集系統采集數據時隨機干擾帶來的誤差,軟件上對測得的數據進行了數字濾波,鑒于滑動平均濾波算法具有能夠良好抑制周期性干擾,平滑度高的特點,這里選取滑動平均濾波法。其原理是:將測量數據看成一個長度為N的隊列,把每次的采樣新值放人隊尾,隊首的一個數據出列,其他數據前移一位,這樣隊列中始終有N個“最新”數據,再將隊列中的N個數據進行數學平均,從而得到新的濾波值。其數學表達式為:
?
式中:
?
為第n次采樣濾波后的輸出;Xn-i為未經濾波的第n-i次采樣;N為滑動平均項數。
?
數據采集過程如下:按測量鍵后,連續采樣1 min(1 min采樣10次),此次測量顯示這一分鐘內采樣值的平均值,繼續采樣,此時顯示值為此次采樣值與前九次采樣值的平均值,即每6 s得一個數據值,LCD可以連續顯示。當切換測量擋時,延時采樣0.5s。
3.2 PID控制系統
為防止調節傳感器接收靈敏度時由于超調或者失調引起的振蕩,使儀器讀數能夠平緩上升或者下降,這里采用PID算法加以調節,以對振蕩進行抑制,在控制過程中采用智能判斷的方法使系統處于最優狀態。PID調節器具有規律簡單,運行可靠,易于實現等特點。
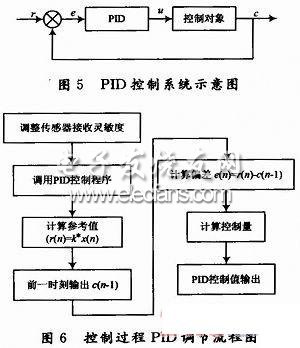
圖5是PID控制的基本原理示意圖,其基本輸入輸出關系可表示為:
?
式中:μ(t)為控制器輸出;e(t)為控制器輸入的偏差信號;e(t)=r(t)-c(t)。
?
比例環節調整系統的開環比例系數,提高系統的穩態精度,降低系統的惰性,加快響應速度;積分環節可以提高系統的型別,消除或減小穩態誤差,使系統的穩態性能得到改善;微分控制使得系統的響應速度變快,超調減小,振蕩減輕。PID控制過程調節流程如圖6所示。
3.3 PID參數的設定
PID控制參數的設定是控制系統設計的核心內容,它是根據被控對象的特性確定PID控制器的比例系數、積分時間和微分時間的大小,確保其在系統受到擾動后仍保持穩定并將誤差保持在最小值。
3.3.1 PID參數的初始值
Ziegler Nichols方法是基于簡單被控過程的Niquist曲線的臨界點計算PID參數初值,其整定準則是要求系統的暫態過程衰減率為0.75,該算法簡單,使用方便。本文采用4:1的衰減比性能準則獲得PID參數的初始值。
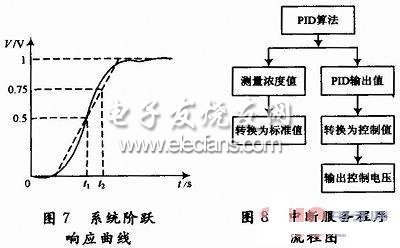
設控制系統有一響應曲線,如圖7所示,給系統加一階躍輸入U,可用一階延時系統近似為:
?
式中:K為放大系數;τ為滯后時間;T為時間常數。
設輸出值達到設定值的50%和75%時所用的時間分別為:t1和t2,則PID參數的初始值可表示為比例系數Kp=1.2U/(RL),積分時間常數TI=2L,微分時間常數TD=0.5L。其中:斜率R=(0.75-0.5)V/(t2-t1),滯后L=t1-(2V0-4V1)(t2-t1)/V。
?
3.3.2 PID的自校正調節原理
本文利用測量誤差改變調節器的步長,實現PID參數的自動整定,使輸出值平穩快速地達到設定值。首先將采樣值與給定值的誤差絕對值分成若干個區間,各區間設定不同的步長,采用不同的計算式。這里PID參數的調整周期應小于采樣周期,采樣周期由整個放大電路的傳輸延時和后續A/D轉換器的性能指標決定。
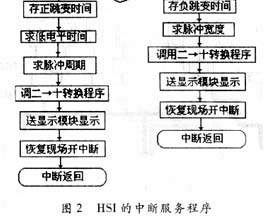
3.4 中斷服務程序
中斷服務程序流程圖如圖8所示。
4 實驗結果與分析
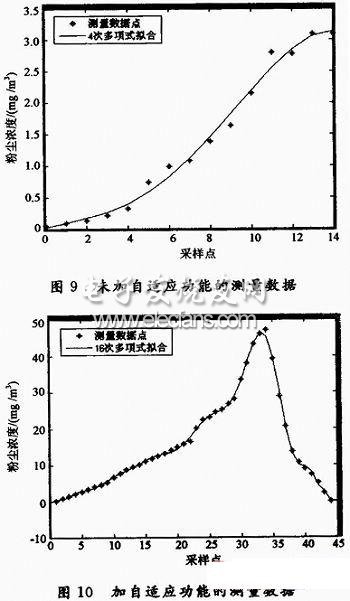
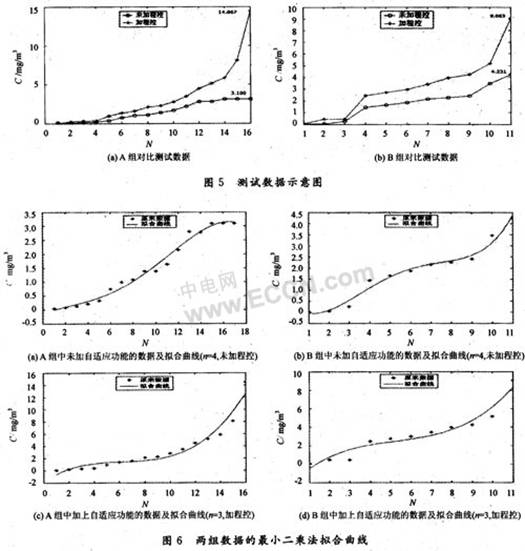
實驗時對煙霧釋放出的粉塵濃度進行了測量。圖9和圖10分別是未加自適應測量功能和加了自適應測量功能測得的粉塵濃度值及其擬合曲線。圖中“*”是采樣得到的粉塵濃度值;“——”是用Matlab對測得的數據點進行擬合后的曲線。由圖9可以看出,當粉塵濃度達到3.1 mg/m3時,濃度不再變化,儀器達到飽和。由圖10可知:濃度較低時,儀器的響應曲線線性度較好,能夠完整地反應粉塵濃度的變化過程,可測得48 mg/m3的濃度值,測量范圍大大地擴大了。采用PID加以控制,數據的平滑度較好,幾乎沒有超調,測量值能夠平穩的上升,達到了預期的效果。
?
5 結語
通過實驗驗證,采用這種自適應測量的方法可以使測量范圍達到0.01~48 mg/m3。采用PID參數的自校正調節,可以使測量曲線平穩地過渡到設定值。PID控制結果幾乎沒有超調,穩定時間短,在設定的目標角度值附近振蕩少,有效抑制了調節傳感器接收靈敏度時引起的振蕩。




















 工商網監
工商網監
評論