 電子發燒友App
電子發燒友App


本系統要求設計并制作一個簡易智能電動車,設計方案包括基本要求,發揮部分及其它創新部分。
基本要求
① 電動車從起跑線出發(車體不得超過起跑線)、沿寬度為2cm的黑色引導線到達B點。在“直道區”鋪設的白紙下沿引導線埋有1~3塊寬度為15cm、長度不等的薄鐵片。電動車檢測到薄鐵片時,立即發出聲光指示信息,并實時存儲、顯示在“直道區”檢測到的薄鐵片數目。
② 電動車到達B點后進入“彎道區”,沿圓弧引導線到達C點(也可脫離圓弧引導線到達C點)。C點下埋有邊長為15cm的正方形薄鐵片,要求電動車到達C點檢測到薄鐵片后在C處停車5秒,停車期間發出斷續的聲光信息。
③ 電動車在光源的引導下,通過障礙區進入停車區并到達車庫。電動車必須在兩個障礙物之間通過且不得與其接觸。
④ 電動車完成上述任務后立即停車,全程不得超過90秒,行駛時間達到90秒時立即自動停車。
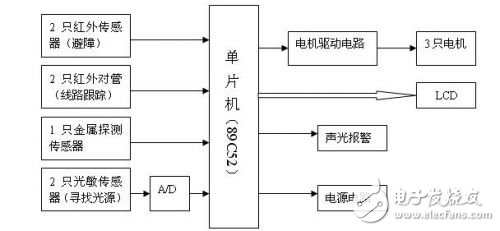
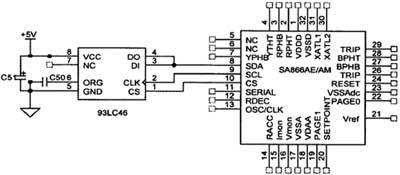
圖2 系統總體框圖
線路跟蹤電路
方案一:采用CCD單色攝像頭,配計算機主板及圖像采集卡。對白背景下,黑線的識別,目前做的比較成熟,效果相當好。但成本高,很難找到合適的載體。
方案二:采用顏色傳感器。目前顏色傳感器的應用,越來越廣泛,效果也可以。但幾百元的價格及相對復雜的處理電路,并且還需要光源,所以也不是一個很好的選擇。
方案三:采用一左一右兩個紅外發射接收對管。該傳感器不但價格便宜,容易購買,而且處理電路(如圖3所示),簡單易行,實際使用效果很好,能很順利地引導小車到達C點。
在該電路中,加比較器LM311的目的,是使模擬量轉化為開關量,便于處理。為使發射有一定的功率,發射回路要求不小于20mA的電流。
根據 ,故可選擇R1=150Ω。
啟動時,小車跨騎在黑線上。兩個紅外發射接收對管,分別安裝在黑線的兩側的白色區域,輸出為低電壓,當走偏,位于黑線上時,輸出為高電壓。因黑線較窄(2cm),為及時調整車的方向,選擇比較器的閥值為2.5v,即黑白相間的位置,即開始調整。實驗表明,效果較理想

圖3 紅外發射接收對管處理電路











 工商網監
工商網監
評論