 電子發(fā)燒友App
電子發(fā)燒友App


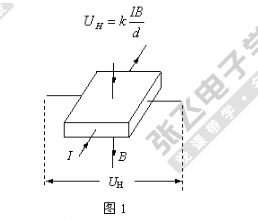
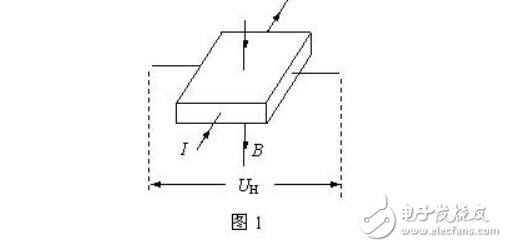
霍爾傳感器簡介
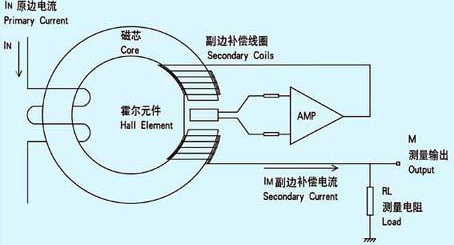
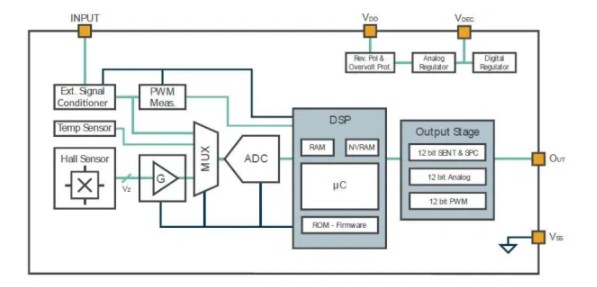
由于霍爾元件產(chǎn)生的電勢差很小,故通常將霍爾元件與放大器電路、溫度補(bǔ)償電路及穩(wěn)壓電源電路等集成在一個(gè)芯片上,稱之為霍爾傳感器。

霍爾傳感器的種類:
線性霍爾傳感器,開關(guān)霍爾傳感器
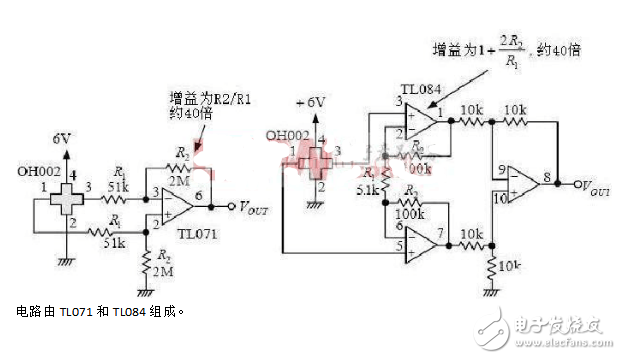
1、線性型霍爾傳感器由霍爾元件、線性放大器和射極跟隨器組成,它輸出模擬量。可以做成電流傳感器(鉗形電流表),位移測量傳感器。
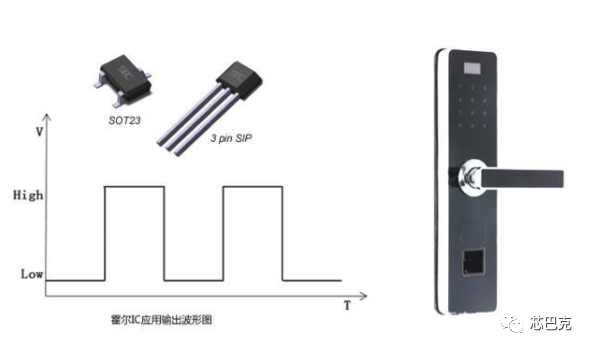
2、開關(guān)型霍爾傳感器由穩(wěn)壓器、霍爾元件、差分放大器,和輸出級(jí)組成,它輸出數(shù)字量。開關(guān)型霍爾傳感器主要用于測轉(zhuǎn)數(shù)、轉(zhuǎn)速、風(fēng)速、流速、接近開關(guān)、關(guān)門告知器、報(bào)警器、自動(dòng)控制電路等。
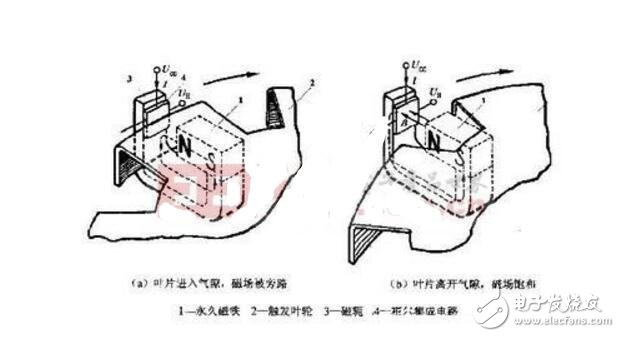
霍爾開關(guān)傳感器測速原理:
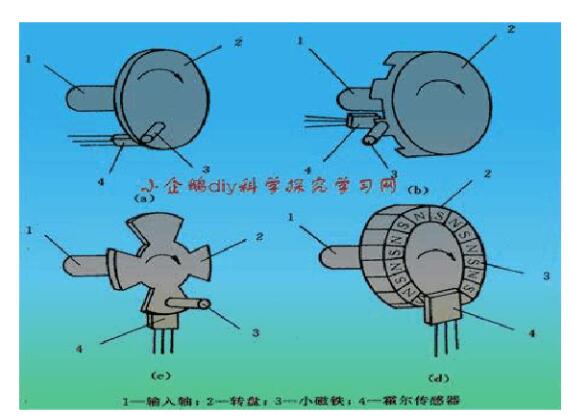
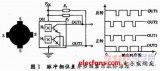
小磁鐵固定在轉(zhuǎn)盤上,轉(zhuǎn)盤與電機(jī)軸相連,同步轉(zhuǎn)動(dòng),小磁鐵通過霍爾傳感器時(shí),霍爾傳感器產(chǎn)生一個(gè)相應(yīng)的脈沖,計(jì)算出兩個(gè)連續(xù)脈沖的間隔時(shí)間,就可以計(jì)算出被測轉(zhuǎn)速。
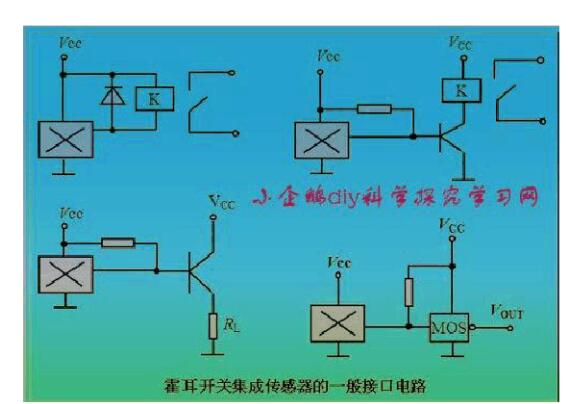
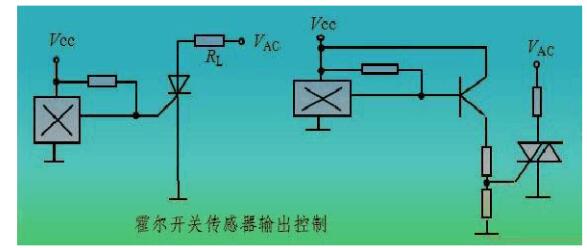
霍爾傳感器的輸出控制
霍爾傳感器測速電路設(shè)計(jì)方案(一)
1、系統(tǒng)總設(shè)計(jì)要求
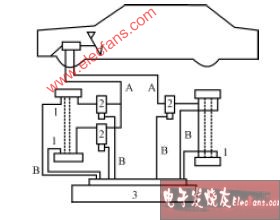
如果把霍爾傳感器放在電機(jī)預(yù)定的位置上,當(dāng)電機(jī)轉(zhuǎn)動(dòng)時(shí),永磁體經(jīng)過霍爾傳感器時(shí),可以測量電路中的脈沖信號(hào)。根據(jù)脈沖信號(hào)的分布可以測得電機(jī)速度。
2、系統(tǒng)實(shí)現(xiàn)方案
(1)霍爾測速模塊的選擇
方案一:采用霍爾元件傳感器;選型號(hào)OH137產(chǎn)品性能好、靈敏度、電路可和各種邏輯電路直接相連,價(jià)格也便宜(10~20元之間不等)。
方案二:采用霍爾傳感器;選型號(hào)為CHV-25P/10的霍爾傳感器,其額定電壓為10V,輸出信號(hào)5V/25mA,電源為12~15V。體積大,價(jià)格較貴(40~120元之間不等)。
從性價(jià)比方面綜合考慮,選擇方案一。
(2)計(jì)數(shù)模塊的選擇
可以采用片外計(jì)數(shù)器和片內(nèi)計(jì)數(shù)器兩個(gè)方案。片外計(jì)數(shù)器的方案是采用8253等片外專用計(jì)數(shù)芯片進(jìn)行脈沖計(jì)數(shù),單片機(jī)控制8253的過程,并在技術(shù)完畢后讀取計(jì)數(shù)值。片內(nèi)計(jì)數(shù)方案是指采用單片機(jī)的內(nèi)部計(jì)數(shù)器完成對(duì)脈沖的計(jì)數(shù)過程。
使用片內(nèi)計(jì)數(shù)器的優(yōu)點(diǎn)在于降低單片機(jī)系統(tǒng)的成本。每到一個(gè)脈沖將會(huì)產(chǎn)生一個(gè)T1的計(jì)數(shù),在T0產(chǎn)生的100ms中斷完成后,T1的中斷溢出次數(shù)就是所需要計(jì)的脈沖數(shù)。特點(diǎn)在于:使用了內(nèi)部的T1作為外部脈沖的計(jì)數(shù)器,并且,為了避免計(jì)數(shù)器的溢出,將T1的初值設(shè)為0。所以選用片內(nèi)計(jì)數(shù)。
(3)顯示方式的選擇
方案一:采用8段LED數(shù)碼管作為顯示模塊核心。數(shù)碼管顯示器件相對(duì)便宜,但是耗能大、編寫程序相對(duì)麻煩,工作量大。
方案二:采用LCD液晶顯示器作為顯示模塊核心。LCD顯示器工作原理簡單,編程方便,節(jié)能環(huán)保。因此選擇方案二。
(4)單片機(jī)模塊的論證與選擇
方案一:選用 AT89C2051單片機(jī)速度快、功耗低、體積小、資源豐富。
方案二:選用PhilipsP89C51RD2有4個(gè)PDA,屬于兼容版。
方案比較:因?yàn)樵O(shè)計(jì)是汽車測速,所以我還是選用了方案一中AT89C2051單片機(jī),選用AT89C2051是因?yàn)閮r(jià)格便宜、低功耗。
(5)轉(zhuǎn)速測量方法與論證
方案一:測周法是測量兩個(gè)脈沖之間的時(shí)間,換算成周期,從而得到頻率。測出產(chǎn)生N個(gè)脈沖內(nèi)所需要的時(shí)間t,則信號(hào)的周期為tNf/,測量頻率誤差2/ttNf,誤差主要來自采樣的時(shí)間誤差,低頻脈沖情況下誤差較小,測量精度高。
方案二:測頻法是測量單位時(shí)間內(nèi)的脈數(shù),換算成頻率。在設(shè)定t 時(shí)間內(nèi),測量產(chǎn)生N個(gè)脈沖,則信號(hào)的周期為/fNt,測量頻率誤差/fNt,誤差主要來自脈沖個(gè)數(shù)正負(fù)一個(gè)計(jì)數(shù)誤差,高頻脈沖情況下誤差較小,測量精度高。
方案比較:由于兩個(gè)方案都產(chǎn)生的誤差,但是方案一中的時(shí)間誤差,而本設(shè)計(jì)是汽車測速要測得是時(shí)刻速度,故選擇方案二。
3、總體硬件設(shè)計(jì)
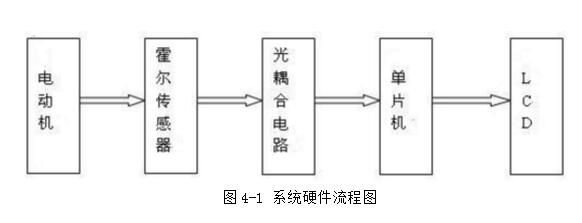
3.1、硬件流程圖
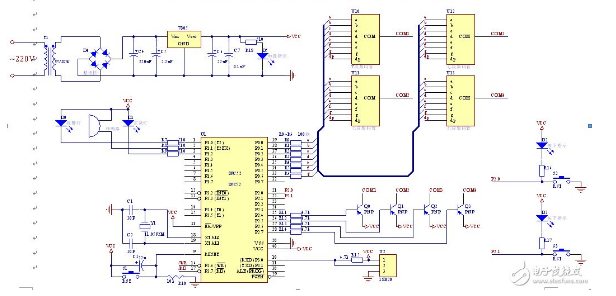
基于霍爾傳感器的速度測量系統(tǒng)工作過程是:測量轉(zhuǎn)速的霍爾傳感器和機(jī)軸同軸連接,機(jī)軸每轉(zhuǎn)一周,產(chǎn)生一定量的脈沖個(gè)數(shù),由霍爾器件電路部分輸出。經(jīng)光電耦合后,成為轉(zhuǎn)速計(jì)數(shù)器的計(jì)數(shù)脈沖。保持同89C2051邏輯電平相一致。控制計(jì)數(shù)時(shí)間,即可實(shí)現(xiàn)計(jì)數(shù)器的計(jì)數(shù)值對(duì)應(yīng)機(jī)軸的轉(zhuǎn)速值。CPU將該值數(shù)據(jù)處理后,在LCD上顯示出來。以單片機(jī)AT89C205l為控制核心,用霍爾集成傳感器作為測量轉(zhuǎn)速的檢測元件,最后用液晶顯示器1602顯示的機(jī)車轉(zhuǎn)速的方法,系統(tǒng)硬件原理圖如圖4-1所示。
3.2、硬件電路設(shè)計(jì)
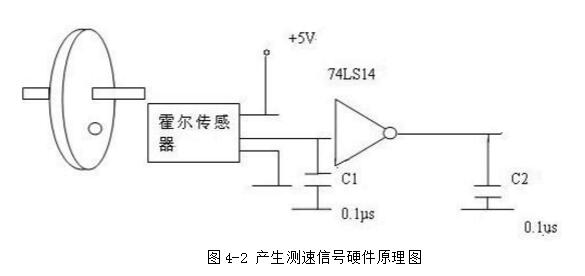
(1)通過霍爾傳感器產(chǎn)生脈沖信號(hào),并經(jīng)過74LS14進(jìn)行放大,硬件電路圖如圖4-2所示:
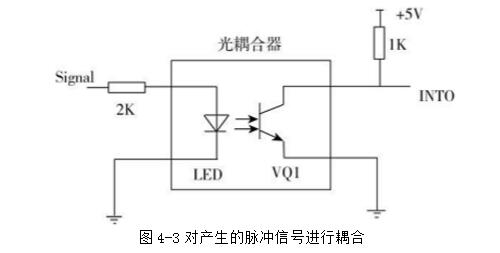
(2)將產(chǎn)生的脈沖信號(hào)進(jìn)行耦合處理。其中Signal代表脈沖信號(hào),脈沖信號(hào)通過光電耦合器將其轉(zhuǎn)換為單片機(jī)可采集的5V脈沖信號(hào),如圖4-3所示。
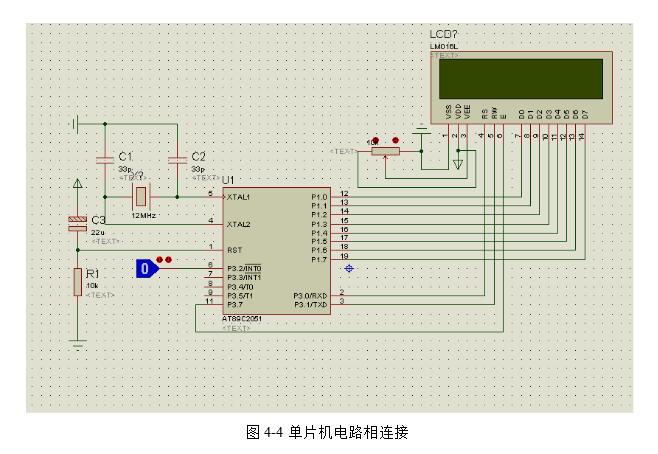
(3)將耦合處理后的信號(hào)介入單片機(jī)中0點(diǎn)位置如圖4-4所示。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論