 電子發(fā)燒友App
電子發(fā)燒友App


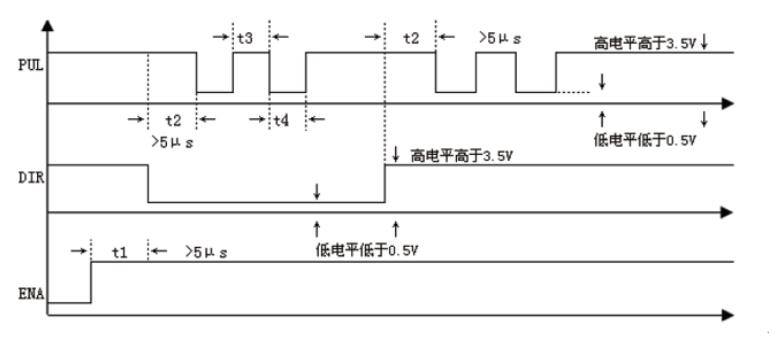
步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號,電機(jī)則轉(zhuǎn)過一個(gè)步距角。步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動器接收到一個(gè)脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個(gè)固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
通常電機(jī)的轉(zhuǎn)子為永磁體,當(dāng)電流流過定子繞組時(shí),定子繞組產(chǎn)生一矢量磁場。該磁場會帶動轉(zhuǎn)子旋轉(zhuǎn)一角度,使得轉(zhuǎn)子的一對磁場方向與定子的磁場方向一致。當(dāng)定子的矢量磁場旋轉(zhuǎn)一個(gè)角度。轉(zhuǎn)子也隨著該磁場轉(zhuǎn)一個(gè)角度。每輸入一個(gè)電脈沖,電動機(jī)轉(zhuǎn)動一個(gè)角度前進(jìn)一步。它輸出的角位移與輸入的脈沖數(shù)成正比、轉(zhuǎn)速與脈沖頻率成正比。改變繞組通電的順序,電機(jī)就會反轉(zhuǎn)。所以可用控制脈沖數(shù)量、頻率及電動機(jī)各相繞組的通電順序來控制步進(jìn)電機(jī)的轉(zhuǎn)動。
發(fā)熱原理
通常見到的各類電機(jī),內(nèi)部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產(chǎn)生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標(biāo)準(zhǔn)的直流或正弦波,還會產(chǎn)生諧波損耗;鐵心有磁滯渦流效應(yīng),在交變磁場中也會產(chǎn)生損耗,其大小與材料,電流,頻率,電壓有關(guān),這叫鐵損。銅損和鐵損都會以發(fā)熱的形式表現(xiàn)出來,從而影響電機(jī)的效率。步進(jìn)電機(jī)一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉(zhuǎn)速而變化,因而步進(jìn)電機(jī)普遍存在發(fā)熱情況,且情況比一般交流電機(jī)嚴(yán)重。
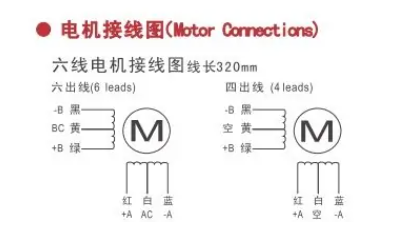
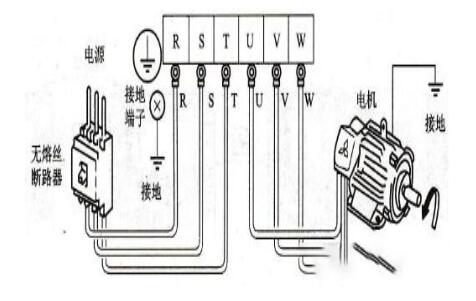
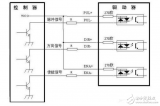
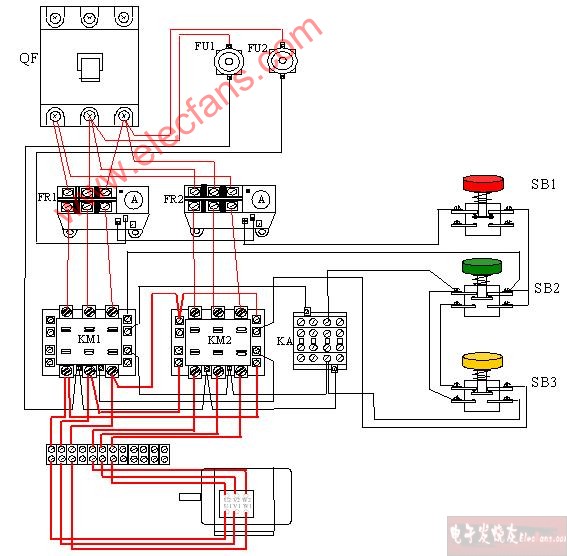
步進(jìn)電機(jī)接線圖

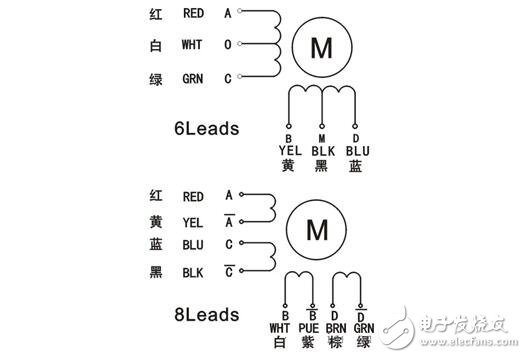


四相步進(jìn)電機(jī)接線圖
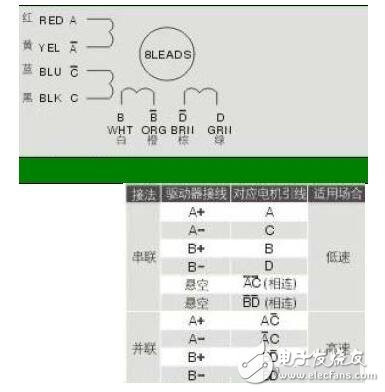
8線步進(jìn)電機(jī)接線圖圖解
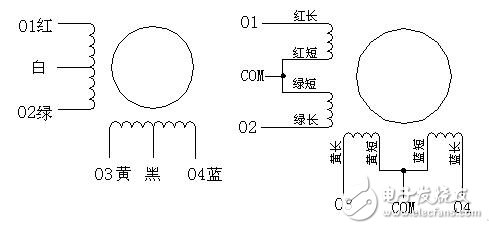
在沒有電機(jī)說明書時(shí),可以用萬用表確認(rèn)電機(jī)8引線的極性,具體步驟如下:
A.先用萬用表測量8個(gè)引線之間的電阻,可判斷出4組線圈引線;
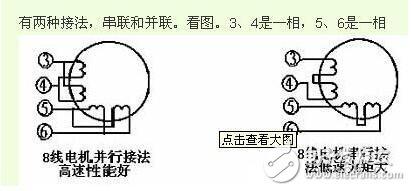
B.由于只接1、6,2、8或1、6,7、4二個(gè)線圈電機(jī)也能正常轉(zhuǎn)動,所以,在4個(gè)線圈中任選2個(gè),接在驅(qū)動器上;
如果電機(jī)不轉(zhuǎn),說明這2組線圈是A相線圈;另外2個(gè)線圈是B相的2個(gè)線圈;
如果電機(jī)轉(zhuǎn)動,說明這2個(gè)線圈一個(gè)是A相,一個(gè)是B相線圈;
C.接2組線圈讓電機(jī)轉(zhuǎn)動后,再從剩下的2個(gè)線圈中任選一個(gè)線圈,串聯(lián)在A相線圈上,如果電機(jī)電機(jī)正常轉(zhuǎn)動了,說明該線圈是A相的另一個(gè)線圈;
如果電機(jī)不轉(zhuǎn),將這個(gè)線圈的正負(fù)對調(diào)后再試一次,如果電機(jī)還不轉(zhuǎn),說明該線圈是B相的另一個(gè)線圈。
D.用上述同樣方法,可以確定最后一個(gè)線圈的極性。
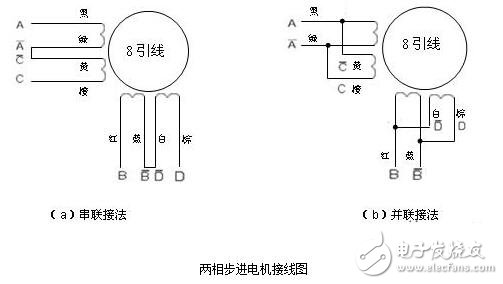
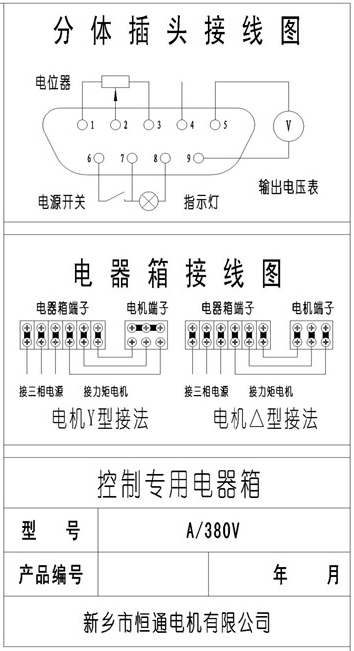
四相八線步進(jìn)電機(jī)接法 :F1、F2接勵磁電源,H1和C1用連線連起來,H2、C2接直流電源。如果需要反轉(zhuǎn)只需改換一下連線這就是:將H1和C2連起來,H2、C1接直流電源就可以了。
四相八線和兩相四線步進(jìn)電機(jī)的區(qū)別:
兩相步進(jìn)電機(jī)在定子上只有兩個(gè)繞組,有四根出線,整步為1.8°,半步為0.9°。在驅(qū)動器中,只要對兩相繞組電流通斷和電流方向進(jìn)行控制就可以了。而四相步進(jìn)電機(jī)在定子上有四個(gè)繞組,有八根出線,整步為0.9°,半步為0.45°,不過驅(qū)動器中需要對四個(gè)繞組進(jìn)行控制,電路相對復(fù)雜了。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論