 電子發(fā)燒友App
電子發(fā)燒友App


無刷直流電機介紹
無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。 無刷電機是指無電刷和換向器(或集電環(huán))的電機,又稱無換向器電機。早在十九紀誕生電機的時候,產(chǎn)生的實用性電機就是無刷形式,即交流鼠籠式異步電動機,這種電動機得到了廣泛的應(yīng)用。但是,異步電動機有許多無法克服的缺陷,以致電機技術(shù)發(fā)展緩慢。上世紀中葉誕生了晶體管,因而采用晶體管換向電路代替電刷與換向器的直流無刷電機就應(yīng)運而生了。這種新型無刷電機稱為電子換向式直流電機,它克服了第一代無刷電機的缺陷。
無刷直流電機工作原理
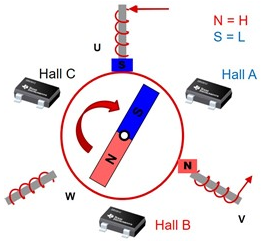
無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。 電動機的定子繞組多做成三相對稱星形接法,同三相異步電動機十分相似。電動機的轉(zhuǎn)子上粘有已充磁的永磁體 ,為了檢測電動機轉(zhuǎn)子的極性,在電動機內(nèi)裝有位置傳感器。驅(qū)動器由功率電子器件和集成電路等構(gòu)成,其功能是:接受電動機的啟動、停止、制動信號,以控制電動機的啟動、停止和制動;接受位置傳感器信號和正反轉(zhuǎn)信號,用來控制逆變橋各功率管的通斷,產(chǎn)生連續(xù)轉(zhuǎn)矩;接受速度指令和速度反饋信號,用來控制和調(diào)整轉(zhuǎn)速;提供保護和顯示等等。
直流電機具有響應(yīng)快速、較大的起動轉(zhuǎn)矩、從零轉(zhuǎn)速至額定轉(zhuǎn)速具備可提供額定轉(zhuǎn)矩的性能,但直流電機的優(yōu)點也正是它的缺點,因為直流電機要產(chǎn)生額定負載下恒定轉(zhuǎn)矩的性能,則電樞磁場與轉(zhuǎn)子磁場須恒維持90°,這就要藉由碳刷及整流子。碳刷及整流子在電機轉(zhuǎn)動時會產(chǎn)生火花、碳粉因此除了會造成組件損壞之外,使用場合也受到限制。交流電機沒有碳刷及整流子,免維護、堅固、應(yīng)用廣,但特性上若要達到相當于直流電機的性能須用復雜控制技術(shù)才能達到。現(xiàn)今半導體發(fā)展迅速功率組件切換頻率加快許多,提升驅(qū)動電機的性能。微處理機速度亦越來越快,可實現(xiàn)將交流電機控制置于一旋轉(zhuǎn)的兩軸直角坐標系統(tǒng)中,適當控制交流電機在兩軸電流分量,達到類似直流電機控制并有與直流電機相當?shù)男阅堋?/p>

無刷直流電機特點:
1、可替代直流電機調(diào)速、變頻器+變頻電機調(diào)速、異步電機+減速機調(diào)速;
2、具有傳統(tǒng)直流電機的優(yōu)點,同時又取消了碳刷、滑環(huán)結(jié)構(gòu);
3、可以低速大功率運行,可以省去減速機直接驅(qū)動大的負載;
4、體積小、重量輕、出力大;
5、轉(zhuǎn)矩特性優(yōu)異,中、低速轉(zhuǎn)矩性能好,啟動轉(zhuǎn)矩大,啟動電流小;
6、無級調(diào)速,調(diào)速范圍廣,過載能力強;
7、軟啟軟停、制動特性好,可省去原有的機械制動或電磁制動裝置;
8、效率高,電機本身沒有勵磁損耗和碳刷損耗,消除了多級減速耗,綜合節(jié)電率可達20%~60%。
9、可靠性高,穩(wěn)定性好,適應(yīng)性強,維修與保養(yǎng)簡單;
10、耐顛簸震動,噪音低,震動小,運轉(zhuǎn)平滑,壽命長;
11、不產(chǎn)生火花,特別適合爆炸性場所,有防爆型;
12、根據(jù)需要可選梯形波磁場電機和正弦波磁場電機。
無刷直流電機的PWM調(diào)制方式介紹
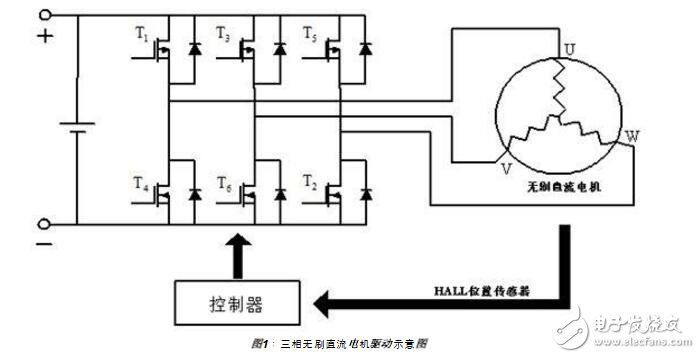
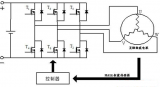
圖1為三相無刷直流電機的驅(qū)動部分示意圖,主要包括霍爾信息的采集,以及根據(jù)霍爾信號對三相逆變器做對應(yīng)的調(diào)制,三相逆變器PWM的開關(guān)順序已經(jīng)PWM的占空比是調(diào)制的主要內(nèi)容,不同的調(diào)制方式對BLDC的運行性能有很大影響,近年來隨著電機控制系統(tǒng)越來越精細,在原來常見的方波120度脈寬調(diào)制基礎(chǔ)上,正弦脈寬調(diào)制(SPWM)和空間矢量脈寬調(diào)制(SVPWM)出現(xiàn),使電機脈動降低、電流波形畸變減小,但后兩者的算法比較復雜,本文將對三種調(diào)制方式逐一地介紹其特性、原理及計算細節(jié)。安森美半導體LC08000M芯片集成這三種調(diào)制方式,適合應(yīng)用在BLDC的驅(qū)動。
1. 方波120度脈寬調(diào)制
利用霍爾值(每個電氣周期6次變化),改變UVW相電流流向,但同一霍爾值內(nèi)電流流向不變,任何時刻只能一相的上橋和另一相的下橋?qū)ǎ@種控制方式簡單,但存在最大60度的轉(zhuǎn)矩偏角,效率降低,同時會伴有轉(zhuǎn)動噪音。
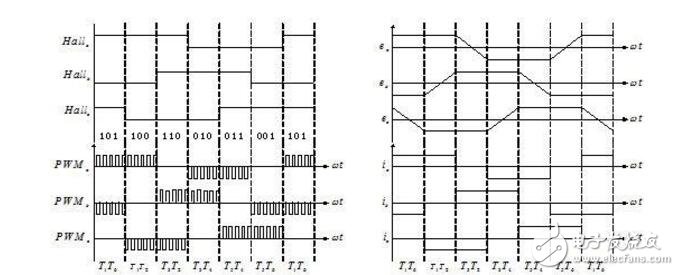
圖2: Hall狀態(tài)與PWM、三相反電動勢、三相電流的對應(yīng)關(guān)系
在上橋下橋PWM開關(guān)控制順序不同,我們可以做出下面5種模式的選裝。
LC08000M為了減小在換相時轉(zhuǎn)矩的波動,采用了PWM值過渡方式,這一處理能有效降低了轉(zhuǎn)動噪音。
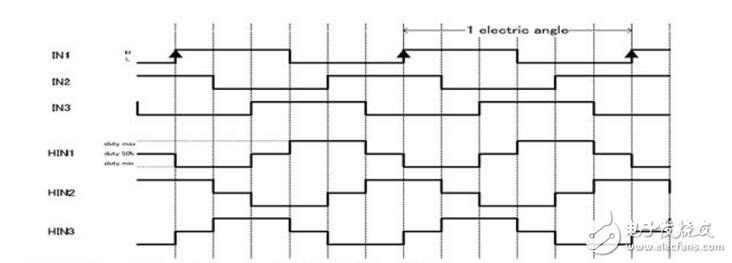
圖3:LC08000M 方波120°脈寬調(diào)制的PWM與霍爾關(guān)系的對應(yīng)圖
2. 正弦脈寬調(diào)制(SPWM)
疊加在MOS管的直流電壓可以通過PWM開關(guān)控制來等效成正弦電壓,由于中性點為0,因此電機的相電壓也為正弦,從而使得電機相線電流也成正弦變化規(guī)則,消除了轉(zhuǎn)矩波動。根據(jù)面積等效原理,正弦波還可以等效成PWM波。如圖5所示,通過這種方式我們不停的調(diào)整PWM的占空比來實現(xiàn)正弦電壓效應(yīng)。
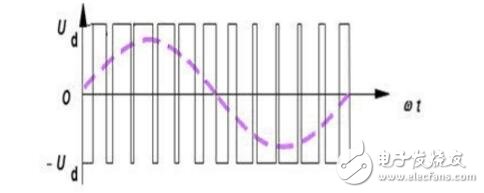
圖3:正弦波與PWM波的等效圖
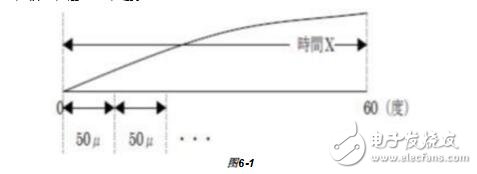
正弦脈寬調(diào)制需要知道ωt的詳細值,而我們從$霍爾元件只可以讀取到60°120°180°240°360°這個6個大體的位置信息,所以我們需要從前幾次霍爾值變化的間隔時間推算出60度內(nèi)的內(nèi)角度。在電機靜啟動情況下,我們無法推算出內(nèi)角度信息,因此啟動情況下,我們還是要采用方波120度脈寬調(diào)制方式啟動,但電機得到一個穩(wěn)定轉(zhuǎn)動后,我們可以推算出內(nèi)角度,就可以切換成正弦脈寬調(diào)制方式。
推算內(nèi)角度方法:如圖6-1首先計算出每個60°需要的時間,除以PWM周期的時間可以計算出60°內(nèi)PWM的次數(shù),從而得到60°內(nèi)每增加1個PWM時內(nèi)角度增加的值,在加上通過霍爾值對應(yīng)的大角度值就得到當前的角度;UVW三相彼此相差120°相位。
推薦課程:
張飛軟硬開源,基于STM32?BLDC直流無刷電機驅(qū)動器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論