 電子發燒友App
電子發燒友App


具體是將異步電動機的定子電流矢量分解為產生磁場的電流分量 (勵磁電流) 和產生轉矩的電流分量 (轉矩電流) 分別加以控制,并同時控制兩分量間的幅值和相位,即控制定子電流矢量,所以稱這種控制方式稱為矢量控制方式。簡單的說,矢量控制就是將磁鏈與轉矩解耦,有利于分別設計兩者的調節器,以實現對交流電機的高性能調速。
矢量控制方式又有基于轉差頻率控制的矢量控制方式、無位置傳感器矢量控制方式和有位置傳感器的矢量控制方式等。這樣就可以將一臺三相異步電機等效為直流電機來控制,因而獲得與直流調速系統同樣的靜、動態性能。矢量控制算法已被廣泛地應用在siemens,ABB,Allen-Bradley,GE,Fuji,SAJ等國際化大公司變頻器上。
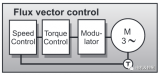
矢量控制(VC)方式
矢量控制變頻調速的做法是將異步電動機在三相坐標系下的定子電流Ia、Ib、Ic、通過三相-二相變換,等效成兩相靜止坐標系下的交流電流Ia1Ib1,再通過按轉子磁場定向旋轉變換,等效成同步旋轉坐標系下的直流電流Im1、It1(Im1相當于直流電動機的勵磁電流;It1相當于與轉矩成正比的電樞電流),然后模仿直流電動機的控制方法,求得直流電動機的控制量,經過相應的坐標反變換,實現對異步電動機的控制。
其實質是將交流電動機等效為直流電動機,分別對速度,磁場兩個分量進行獨立控制。通過控制轉子磁鏈,然后分解定子電流而獲得轉矩和磁場兩個分量,經坐標變換,實現正交或解耦控制。綜合以上:矢量控制無非就四個知識:等效電路、磁鏈方程、轉矩方程、坐標變換(包括靜止和旋轉)。矢量控制方法的提出具有劃時代的意義。然而在實際應用中,由于轉子磁鏈難以準確觀測,系統特性受電動機參數的影響較大,且在等效直流電動機控制過程中所用矢量旋轉變換較復雜,使得實際的控制效果難以達到理想分析的結果。
了解了矢量控制的定義和矢量控制的方式,接下來我們一起來了解一下關于閉環矢量控制與開環矢量控制之間到底有何不同。
閉環矢量控制 VS 開環矢量控制
SLVC 我們也把它稱為開環矢量控制,但它其實不是真正意義上的開環,因為這種控制方式下,其轉速外環還是存在的,只不過這個時候,轉速反饋值不是電機的真正轉速反饋值,而是變頻器根據電機模型算出來的轉速值作為反饋信號。電機不帶轉速反饋裝置,變頻器依靠自身內部軟件中的轉速觀測器,來計算出電機轉速。從而達到對電機轉速的控制。它本質上是一種“不帶轉速反饋的閉環控制”,
如果調速系統對電機轉速的控制精度要求非常高,且需要進行位置或者轉矩控制,并對轉矩的穩定性、精度也有要求,那就需要進行閉環矢量控制,這時你的電機一定要配編碼器,而帶編碼器的矢量控制即VC控制方式下,轉速反饋值是編碼器測出的實際轉速值,是真正的電機轉速,不是變頻器自己算出來的。
開環矢量控制最終和閉環一樣,也是改變變頻器的脈沖電壓波形,只是因為沒有編碼器的速度反饋,是通過電流環的電流傳感器反饋一個電流信號到微處理器,來參與矢量運算,從而實現電機的矢量控制。
要說調速系統的開環控制的話,其實V/F(變頻變壓)控制是才可以說是真正的開環控制,這時變頻器對電機轉速完全不能控制,它只輸出一個固定頻率、固定幅值的電壓,而不管電機此時轉速為多少。
轉速閉環調速系統中控制器默認的是PID控制,不過一般都把微分控制功能關閉,采用比例積分PI調節器控制。(如西門子MM440變頻器。 )而且PID控制器是變頻器內置的,速度環PID控制器是不需要我們用戶外配的。













 工商網監
工商網監
評論