 電子發(fā)燒友App
電子發(fā)燒友App


本文首先介紹了伺服系統(tǒng)的組成部分以及結(jié)構(gòu)組成,其次介紹了伺服系統(tǒng)的基本原理及分類,最后詳細(xì)的闡述了伺服系統(tǒng)的性能要求、參數(shù)以及應(yīng)用。
什么是伺服系統(tǒng)
伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。
伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動控制系統(tǒng)。它的主要任務(wù)是按控制命令的要求、對功率進(jìn)行放大、變換與調(diào)控等處理,使驅(qū)動裝置輸出的力矩、速度和位置控制非常靈活方便。
在很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機(jī)械位移或位移速度、加速度的反饋控制系統(tǒng),其作用是使輸出的機(jī)械位移(或轉(zhuǎn)角)準(zhǔn)確地跟蹤輸入的位移(或轉(zhuǎn)角),其結(jié)構(gòu)組成和其他形式的反饋控制系統(tǒng)沒有原則上的區(qū)別。伺服系統(tǒng)最初用于國防軍工, 如火炮的控制, 船艦、飛機(jī)的自動駕駛,導(dǎo)彈發(fā)射等,后來逐漸推廣到國民經(jīng)濟(jì)的許多部門,如自動機(jī)床、無線跟蹤控制等。
伺服系統(tǒng)的組成部分
伺服系統(tǒng)的結(jié)構(gòu)組成
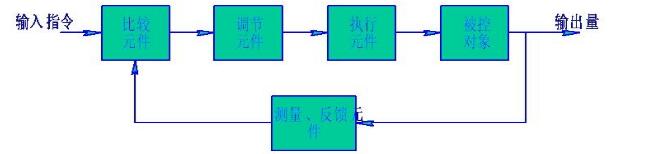
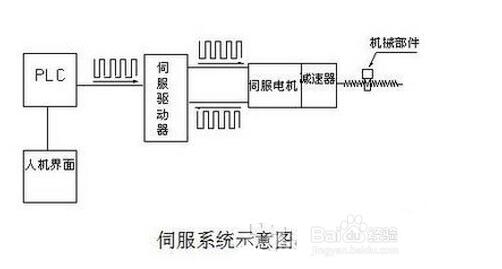
機(jī)電一體化的伺服控制系統(tǒng)的結(jié)構(gòu)、類型繁多,但從自動控制理論的角度來分析,伺服控制系統(tǒng)一般包括控制器、被控對象、執(zhí)行環(huán)節(jié)、檢測環(huán)節(jié)、比較環(huán)節(jié)等五部分。下圖給出了伺服系統(tǒng)組成原理框圖。
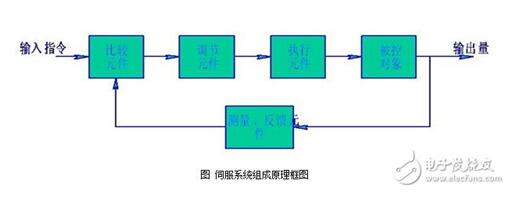
1、比較環(huán)節(jié)
比較環(huán)節(jié)是將輸入的指令信號與系統(tǒng)的反饋信號進(jìn)行比較,以獲得輸出與輸入間的偏差信號的環(huán)節(jié),通常由專門的電路或計算機(jī)來實現(xiàn)。?
2、控制器
控制器通常是計算機(jī)或PID控制電路,其主要任務(wù)是對比較元件輸出的偏差信號進(jìn)行變換處理,以控制執(zhí)行元件按要求動作。
3、執(zhí)行環(huán)節(jié)
執(zhí)行環(huán)節(jié)的作用是按控制信號的要求,將輸入的各種形式的能量轉(zhuǎn)化成機(jī)械能,驅(qū)動被控對象工作。機(jī)電一體化系統(tǒng)中的執(zhí)行元件一般指各種電機(jī)或液壓、氣動伺服機(jī)構(gòu)等。
4、被控對象
5、檢測環(huán)節(jié)
檢測環(huán)節(jié)是指能夠?qū)敵鲞M(jìn)行測量并轉(zhuǎn)換成比較環(huán)節(jié)所需要的量綱的裝置,一般包括傳感器和轉(zhuǎn)換電路。
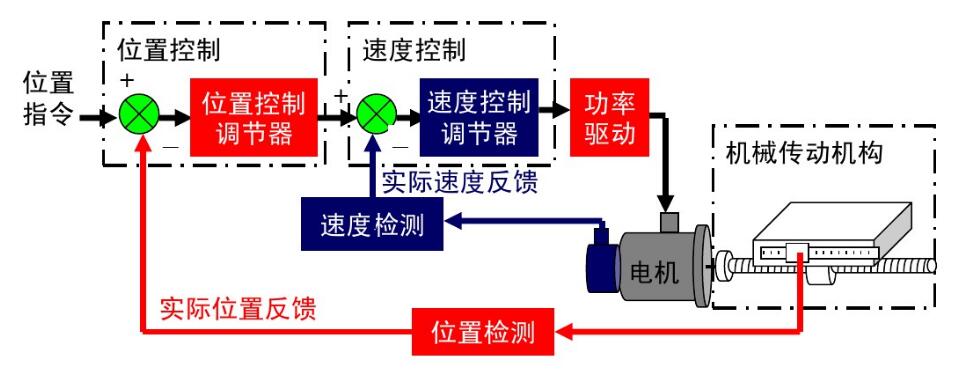
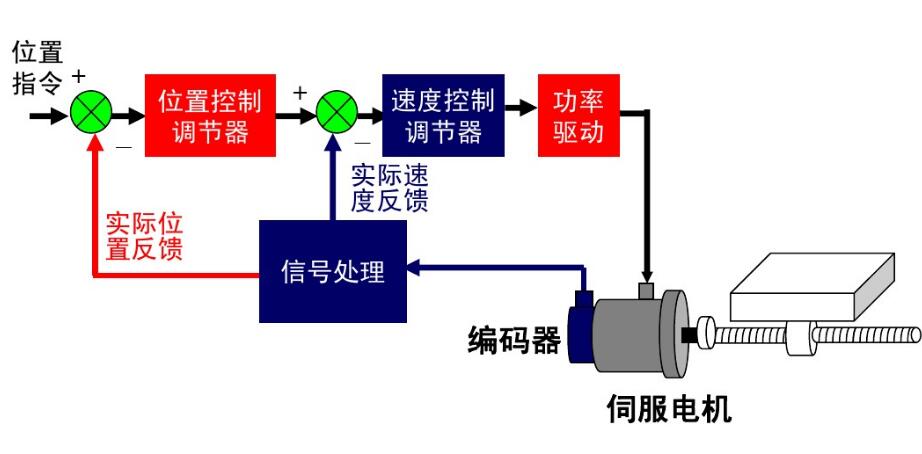
伺服系統(tǒng)的基本原理
位置檢測裝置將檢測到的移動部件的實際位移量進(jìn)行位置反饋,與位置指令信號進(jìn)行比較,將兩者的差值進(jìn)行位置調(diào)節(jié),變換成速度控制信號,控制驅(qū)動裝置驅(qū)動伺服電動機(jī)以給定的速度向著消除偏差的方向運動,直到指令位置與反饋的實際位置的差值等于零為止。
伺服系統(tǒng)的分類
1、開環(huán)伺服系統(tǒng)
開環(huán)伺服系統(tǒng)即無位置反饋的系統(tǒng),其驅(qū)動元件主要是功率步進(jìn)電機(jī)或液壓脈沖馬達(dá)。這兩種驅(qū)動元件的工作原理的實質(zhì)是數(shù)字脈沖到角度位移的變換,它不用位置檢測元件實現(xiàn)定位,而是靠驅(qū)動裝置本身,轉(zhuǎn)過的角度正比與指令脈沖的個數(shù);運動速度由進(jìn)給脈沖的頻率決定。
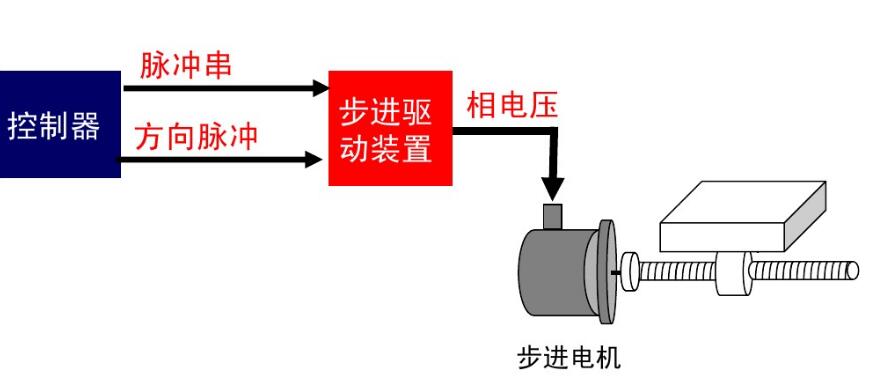
開環(huán)伺服系統(tǒng)的結(jié)構(gòu)簡單,易于控制,但精度差,低速不平穩(wěn),告訴扭矩小。一般用于輕載負(fù)載變化不大或經(jīng)濟(jì)型數(shù)控機(jī)床上。
2、閉環(huán)伺服系統(tǒng)
閉環(huán)伺服系統(tǒng)是誤差控制隨動隨動系統(tǒng)。數(shù)控機(jī)床進(jìn)給系統(tǒng)的誤差,是CNC輸出的位置指令和機(jī)床工作臺(或刀架)實際位置的差值。閉環(huán)系統(tǒng)運動執(zhí)行元件不能反映運動的位置,因此需要有位置檢測裝置。該裝置測出實際位移量或者實際所處的位置,并將測量值反饋給CNC裝置,與指令進(jìn)行比較,求得誤差,依次構(gòu)成閉環(huán)位置控制。
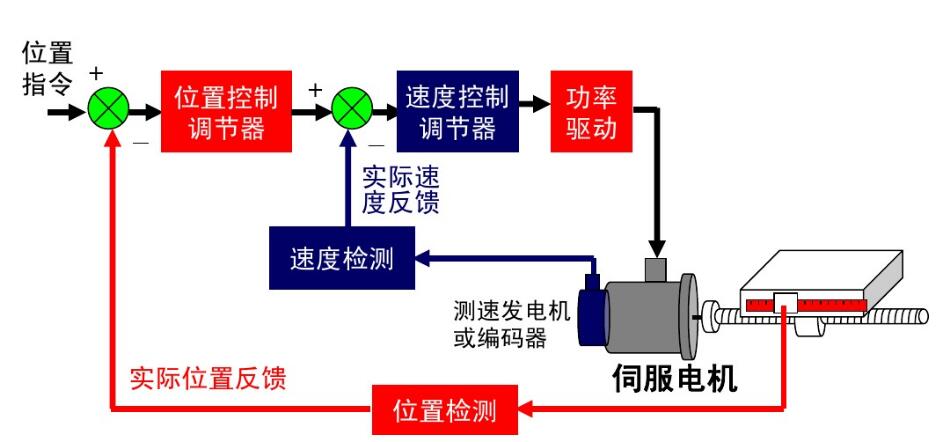
由于閉環(huán)伺服系統(tǒng)是反饋控制,反饋測量裝置精度很高,所以系統(tǒng)傳動鏈的誤差,環(huán)內(nèi)各元件的誤差以及運動中造成的誤差都可以得到補償,從而大大提高了跟隨精度和定位精度。
3、半閉環(huán)系統(tǒng)
位置檢測元件不直接安裝在進(jìn)給坐標(biāo)的最終運動部件上,而是中間經(jīng)過機(jī)械傳動部件的位置轉(zhuǎn)換,稱為間接測量。亦即坐標(biāo)運動的傳動鏈有一部分在位置閉環(huán)以外,在環(huán)外的傳動誤差沒有得到系統(tǒng)的補償,因而這種伺服系統(tǒng)的精度低于閉環(huán)系統(tǒng)。
半閉環(huán)和閉環(huán)系統(tǒng)的控制結(jié)構(gòu)是一致的,不同點只是閉環(huán)系統(tǒng)環(huán)內(nèi)包括較多的機(jī)械傳動部件,傳動誤差均可被補償。理論上精度可以達(dá)到很高。但由于受機(jī)械變形、溫度變化、振動以及其它因素的影響,系統(tǒng)穩(wěn)定性難以調(diào)整。此外,機(jī)床運行一段時間后,由于機(jī)械傳動部件的磨損、變形以及其它因素的改變,容易使系統(tǒng)穩(wěn)定性改變,精度發(fā)生變化。因此,目前使用半閉環(huán)系統(tǒng)較多。只在具備傳動部件緊密度高、性能穩(wěn)定、使用過程溫差變化不大的高精度數(shù)控機(jī)床上使用全閉環(huán)伺服系統(tǒng)。
伺服系統(tǒng)的性能要求及參數(shù)
性能要求
對伺服系統(tǒng)的基本要求有穩(wěn)定性、精度和快速響應(yīng)性。
穩(wěn)定性好:作用在系統(tǒng)上的擾動消失后,系統(tǒng)能夠恢復(fù)到原來的穩(wěn)定狀態(tài)下運行或者在輸入指令信號作用下,系統(tǒng)能夠達(dá)到新的穩(wěn)定運行狀態(tài)的能力,在給定輸入或外界干擾作用下,能在短暫的調(diào)節(jié)過程后到達(dá)新的或者回復(fù)到原有平衡狀態(tài);
精度高:伺服系統(tǒng)的精度是指輸出量能跟隨輸入量的精確程度。作為精密加工的數(shù)控機(jī)床,要求的定位精度或輪廓加工精度通常都比較高,允許的偏差一般都在 0.01~0.00lmm之間;
快速響應(yīng)性好:有兩方面含義,一是指動態(tài)響應(yīng)過程中,輸出量隨輸入指令信號變化的迅速程度,二是指動態(tài)響應(yīng)過程結(jié)束的迅速程度。快速響應(yīng)性是伺服系統(tǒng)動態(tài)品質(zhì)的標(biāo)志之一,即要求跟蹤指令信號的響應(yīng)要快,一方面要求過渡過程時間短,一般在200ms以內(nèi),甚至小于幾十毫秒;另一方面,為滿足超調(diào)要求,要求過渡過程的前沿陡,即上升率要大。
節(jié)能高:由于伺服系統(tǒng)的快速相應(yīng),注塑機(jī)能夠根據(jù)自身的需要對供給進(jìn)行快速的調(diào)整,能夠有效提高注塑機(jī)的電能的利用率,從而達(dá)到高效節(jié)能。
主要參數(shù)
衡量伺服系統(tǒng)性能的主要指標(biāo)有頻帶寬度和精度。頻帶寬度簡稱帶寬,由系統(tǒng)頻率響應(yīng)特性來規(guī)定,反映伺服系統(tǒng)的跟蹤的快速性。帶寬越大,快速性越好。伺服系統(tǒng)的帶寬主要受控制對象和執(zhí)行機(jī)構(gòu)的慣性的限制。慣性越大,帶寬越窄。一般伺服系統(tǒng)的帶寬小于15赫,大型設(shè)備伺服系統(tǒng)的帶寬則在1~2赫以下。自20世紀(jì)70年代以來,由于發(fā)展了力矩電機(jī)及高靈敏度測速機(jī),使伺服系統(tǒng)實現(xiàn)了直接驅(qū)動,革除或減小了齒隙和彈性變形等非線性因素,使帶寬達(dá)到50赫,并成功應(yīng)用在遠(yuǎn)程導(dǎo)彈、人造衛(wèi)星、精密指揮儀等場所。伺服系統(tǒng)的精度主要決定于所用的測量元件的精度。
因此,在伺服系統(tǒng)中必須采用高精度的測量元件,如精密電位器、自整角機(jī)、旋轉(zhuǎn)變壓器、光電編碼器、光柵、磁柵和球柵等。此外,也可采取附加措施來提高系統(tǒng)的精度,例如將測量元件(如自整角機(jī))的測量軸通過減速器與轉(zhuǎn)軸相連,使轉(zhuǎn)軸的轉(zhuǎn)角得到放大,來提高相對測量精度。采用這種方案的伺服系統(tǒng)稱為精測粗測系統(tǒng)或雙通道系統(tǒng)。通過減速器與轉(zhuǎn)軸嚙合的測角線路稱精讀數(shù)通道,直接取自轉(zhuǎn)軸的測角線路稱粗讀數(shù)通道。
伺服系統(tǒng)的應(yīng)用
1、激光加工領(lǐng)域
2、機(jī)器人領(lǐng)域
3、數(shù)控車床領(lǐng)域
4、大規(guī)模集成電路制造辦公自動化設(shè)備
5、雷達(dá)等高科技領(lǐng)域









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論