 電子發燒友App
電子發燒友App


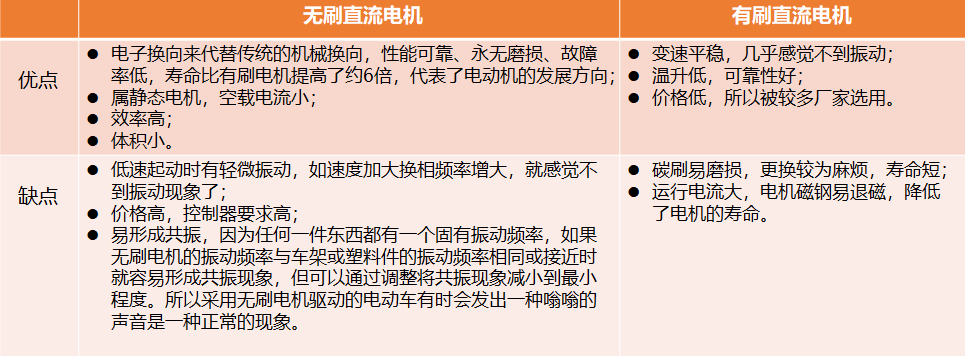
無刷直流電機(BLDC)以電子換向器取代了機械換向器,所以無刷直流電機既具有直流電機良好的調速性能等特點,又具有交流電機結構簡單、無換向火花、運行可靠和易于維護等優點。
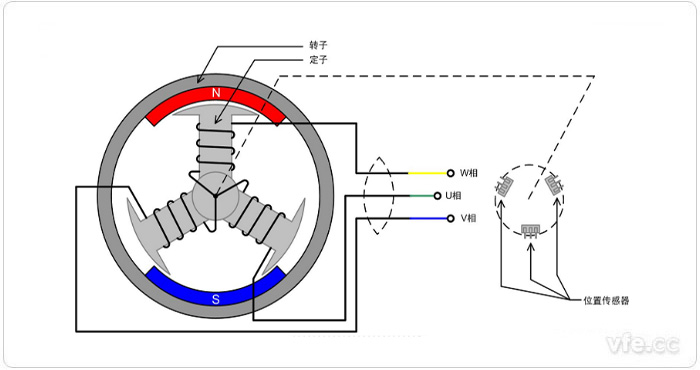
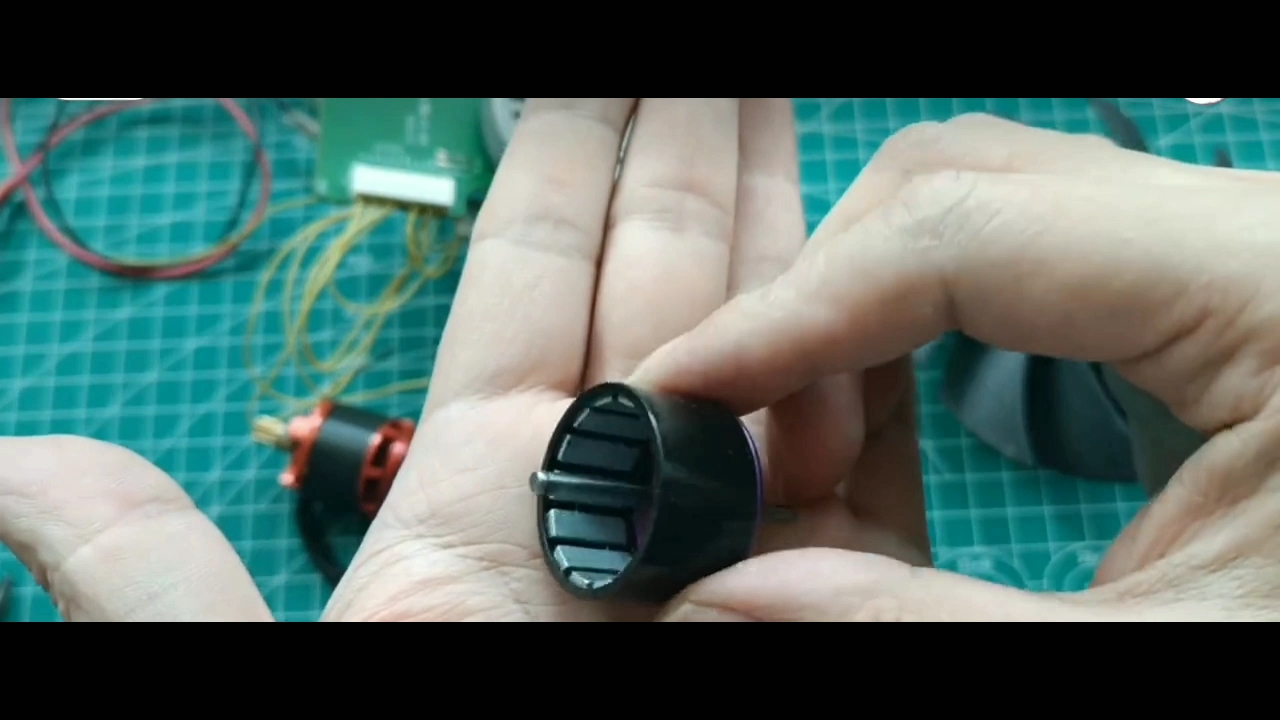
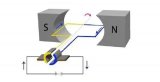
圖1、無刷直流電機模型
無刷直流電機主要由用永磁材料制造的轉子、帶有線圈繞組的定子和位置傳感器(可有可無)組成。可見,它和直流電機有著很多共同點,定子和轉子的結構差不多(原來的定子變為轉子,轉子變為定子),繞組的連線也基本相同。但是,結構上它們有一個明顯的區別:無刷直流電機沒有直流電機中的換向器和電刷,取而代之的是位置傳感器。這樣,電機結構就相對簡單,降低了電機的制造和維護成本,但無刷直流電機不能自動換向(相),犧牲的代價是電機控制器成本的提高(如同樣是三相直流電機,有刷直流電機的驅動橋需要 4 只功率管,而無刷直流電機的驅動橋則需要 6 只功率管)。
圖1所示為其中一種小功率三相、星形連接、單副磁對極的無刷直流電機,它的定子在內,轉子在外。另一種無刷直流電機的結構和這種剛剛相反,它的定子在外,轉子在內,即定子是線圈繞組組成的機座,而轉子用永磁材料制造。
無刷直流電機有以下的特點:
● 無刷直流電機的外特性好,能夠在低速下輸出大轉矩,使得它可以提供大的起動轉矩;
● 無刷直流電機的速度范圍寬,任何速度下都可以全功率運行;
● 無刷直流電機的效率高、過載能力強,使得它在拖動系統中有出色的表現;
● 無刷直流電機的再生制動效果好,由于它的轉子是永磁材料,制動時電機可以進入發電機狀態;
● 無刷直流電機的體積小,功率密度高;
● 無刷直流電機無機械換向器,采用全封閉式結構,可以防止塵土進入電機內部,可靠性高;
● 無刷直流電機比異步電機的驅動控制簡單。
無刷電機的驅動工作原理?
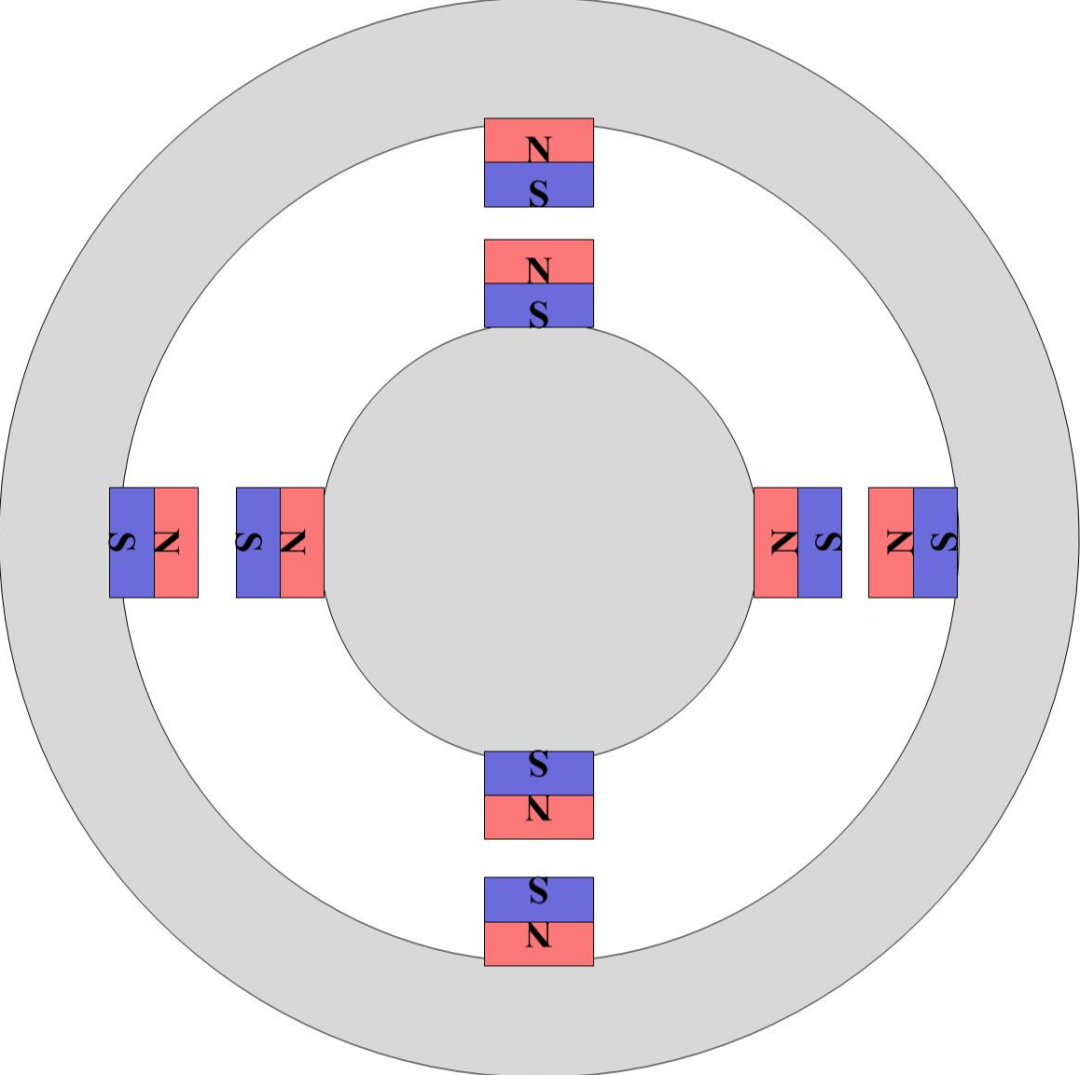
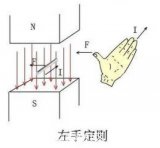
無刷直流電機的定子是線圈繞組電樞,轉子是永磁體。如果只給電機通以固定的直流電流,則電機只能產生不變的磁場,電機不能轉動起來,只有實時檢測電機轉子的位置,再根據轉子的位置給電機的不同相通以對應的電流,使定子產生方向均勻變化的旋轉磁場,電機才可以跟著磁場轉動起來。
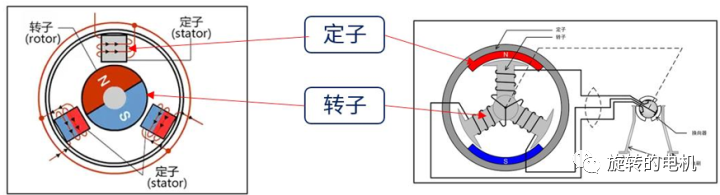
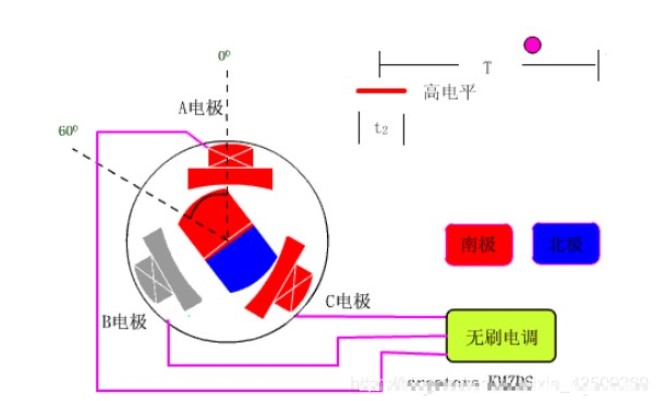
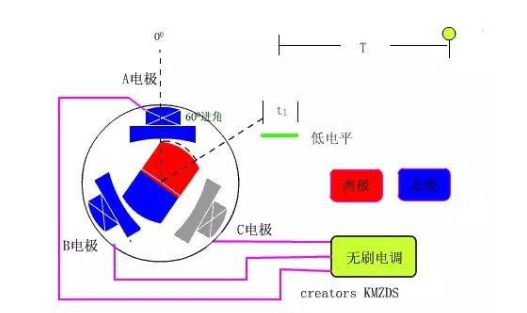
如圖2所示為無刷直流電機的轉動原理示意圖,為了方便描述,電機定子的線圈中心抽頭接電機電源 POWER,各相的端點接功率管,位置傳感器導通時使功率管的 G極接 12V,功率管導通,對應的相線圈被通電。由于三個位置傳感器隨著轉子的轉動,會依次導通,使得對應的相線圈也依次通電,從而定子產生的磁場方向也不斷地變化,電機轉子也跟著轉動起來,這就是無刷直流電機的基本轉動原理——檢測轉子的位置,依次給各相通電,使定子產生的磁場的方向連續均勻地變化。
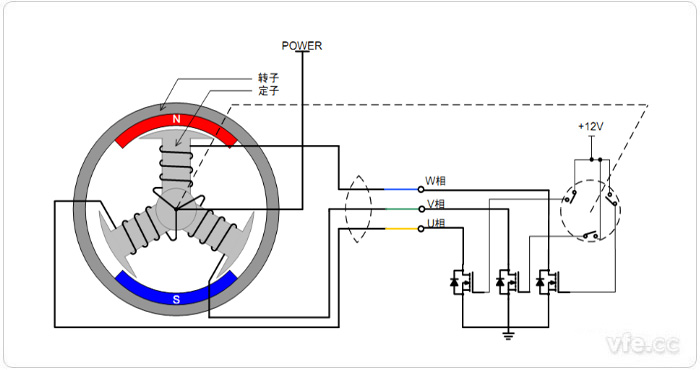
圖2:無刷直流電機轉動原理示意圖
1.三相驅動橋?
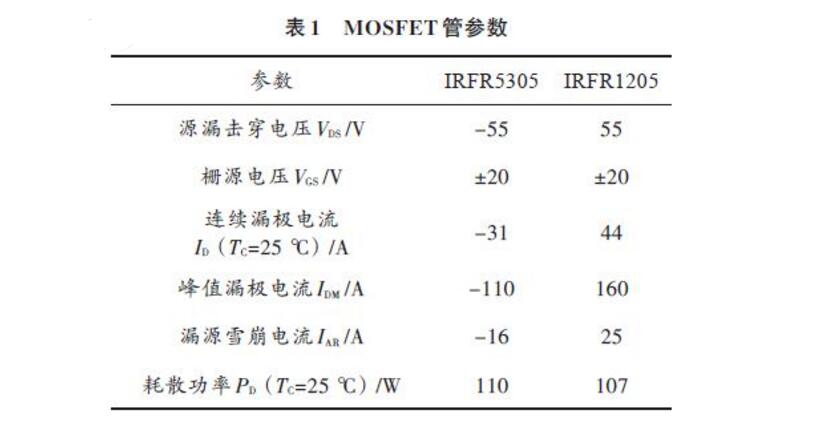
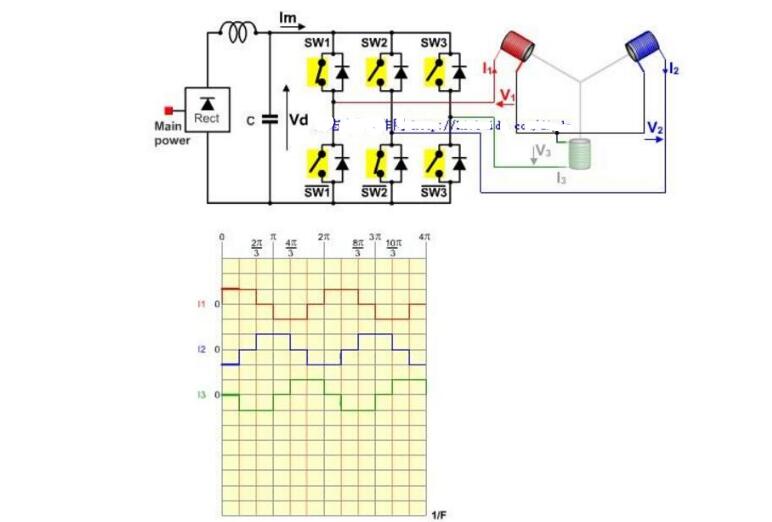
下圖為無刷電機的三相全橋驅動電路,使用六個N溝道的MOSFET管(Q1~Q6)做功率輸出元件,工作時輸出電流可達數十安。為便于描述,該電路有以下默認約定:Q1/Q2/Q3稱做驅動橋的“上臂”,Q4/Q5/Q6稱做“下臂”。
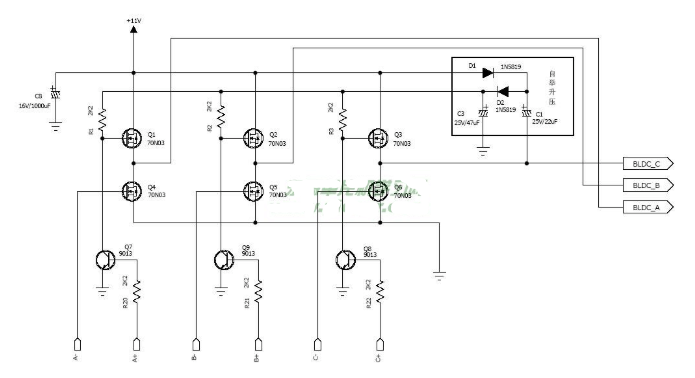
圖中R1/R2/R3為Q1/Q2/Q3的上拉電阻,連接到二極管和電容組成的倍壓整流電路(原理請自行分析),為上臂驅動管提供兩倍于電源電壓(2×11V)的上拉電平,使上臂MOSFET在工作時有足夠高的VGS壓差,降低MOSFET大電流輸出時的導通內阻,詳細數據可參考MOS管DataSheet。?
上臂MOS管的G極分別由Q7/Q8/Q9驅動,在工作時只起到導通換相的作用。下臂MOS由MCU的PWM輸出口直接驅動,注意所選用的MCU管腳要有推挽輸出特性。
驅動橋全部選用N溝道MOSFET的好處:?
大電流N溝道MOS可供選擇的型號眾多,貨源充足便于購買,使用的MOSFET類型減少,間接降低采購元件的難度。???
在圖1中,上臂MOS管經過Q7/Q8/Q9驅動,邏輯電平和下臂MOS剛好相反,這樣的好處是,MCU上電時I/O默認為1,上臂MOS不會導通。只有下臂MOS導通,因此不會有電流經過驅動橋,消除了潛在電路隱患。??
C8是整個電調的電源濾波電容,使用中一定要接上,否則無刷電機的反電動勢疊加在電源上不能被濾除,由倍壓電路整流后的電壓高達30V左右,己接近MOSFET的VGS上限,可能會損壞MOSFET。?
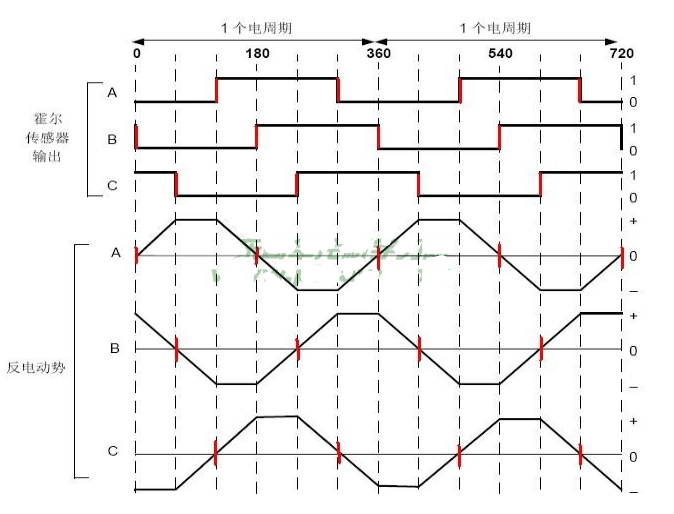
2.反電動勢波形
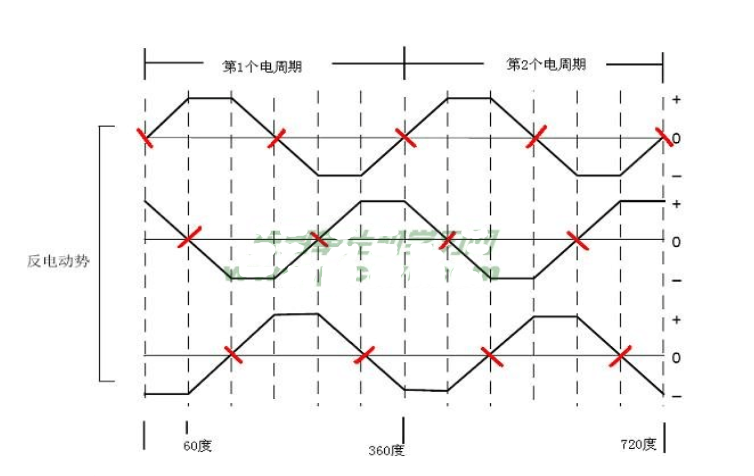
上圖所示為無刷電機運轉中的理想反電動勢波形,紅線標出來的是反電動勢的過零點。兩個虛線間是60度電氣角度,不要理解成電機的機械角度。常用航模電機屬于無刷三相六拍電機,每個電周期有六個狀態。星形接法中(Y形)在每一時刻電機的通電線圈只有兩相,另一相線圈懸空,懸空的線圈會產生反電動勢,反電動勢來源于電機磁體旋轉而造成本線圈切割磁力線和另兩相線圈通電時的互感。由于電機轉動的瞬時角速度呈梯形波動,產生的反電動勢也相應的呈梯形變化。但這些不是重要的,我們需要的只是準確的檢測出過零點,為換相做準備。看上圖中的第一個電周期過零點數目,三個線圈在時間軸上共出現6次過零點,和電周期的節拍數目相同。我們所要做的是,只要檢測到過零點,就需要給電機換相了。
3.過零檢測電路?
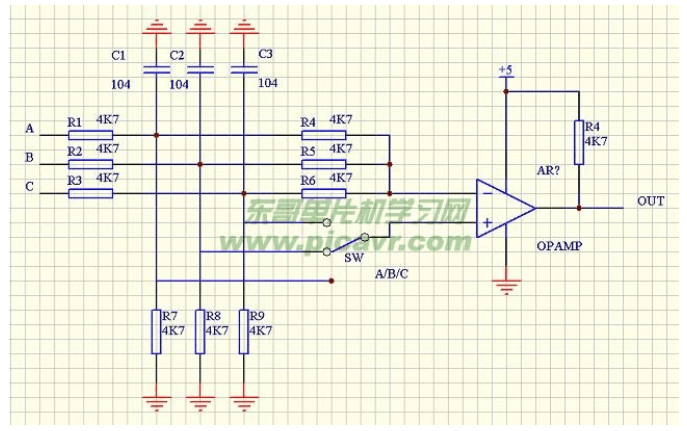
用比較器檢測過零點的基本電路接法,電機的相線(A/B/C)接比較器的同相輸入端,比較器的負端接相線A/B/C的虛擬地電位。虛擬地電位由A/B/C相經過電阻隔離形成,詳細原理可參考相關資料。相線上產生的反電動勢電壓以虛擬地為參考點,做正負周期性的變化。在每次比較器輸出狀態翻轉時,說明檢測到了過零點,接下來需要做換相動作了。A/B/C三相分別需要一個過零點檢測電路,也可用電子開關電路進行實時切換,A/B/C相共用一個過零檢測電路,這通常在集成了模擬外設的MCU內實現。
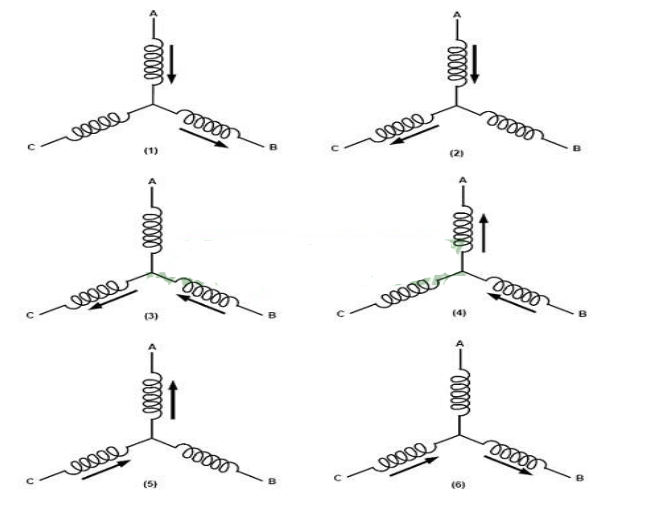
4.線圈換相的順序?
關于電機運行的換相步驟,需嚴格按照以下的換相順序如圖4所示,應用中需要調換電機的轉動方向,只需把電機的任意兩根相線對調即可。
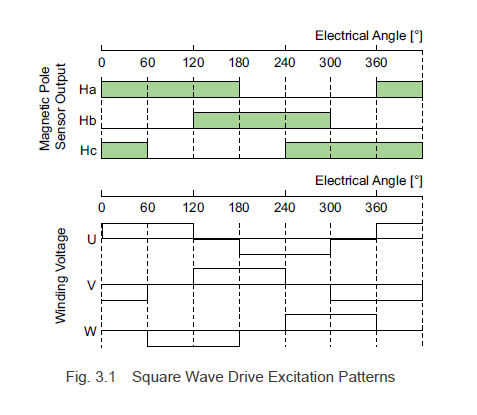
5.?過零點的30度電角度延遲?
理想的反電動勢波形和霍爾傳感器輸出波形對比圖,從圖中可看出,反電動勢的過零點和霍爾傳感器的波形翻轉同步,如果用此反電動勢過零信號進行程序換相會獲得和有感無刷電機一樣的運轉性能。
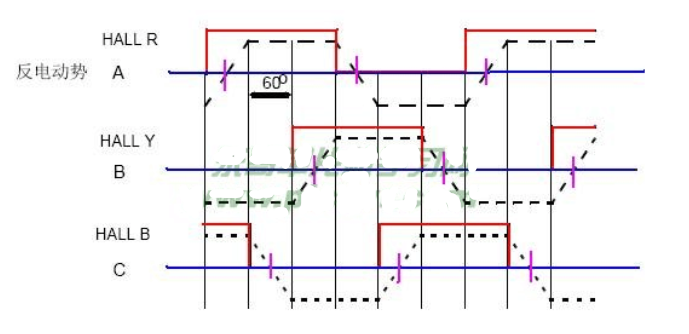
實際的反電動勢波形和霍爾波形對比圖如上所示,紅線為霍爾的輸出波形,黑色虛線是反電動勢,紫色豎線為反電動勢的過零點,時間軸的方向為從左往右,可以得知反電動勢的過零點比霍爾傳感器的輸出波形提前了半個電節拍,即30度電角度。為了能夠在正確的時刻才換相,需要在檢測到反電動勢過零點后延遲30度電角度之后,才進行換相。究竟延遲多長時間才夠30度時間呢?需要對相鄰兩個過零點之間的時間進行計時,因為無刷電機的轉速是會變化的,相應的電周期也會變化。用定時器得到計時值后除以2就是當前電機轉速下的30度電角度延遲時間值,把此時間值裝入一個定時器,并打開該定時器中斷,等延時完畢進中斷即可完成電機換相。












 工商網監
工商網監
評論