 電子發燒友App
電子發燒友App


圖2顯示了sigma-delta、逐次逼近和閃速轉換器的分辨率范圍,同時還給出了每種轉換器類型的最大轉換速率。如圖所示,sigma-delta ADC的轉換速率在逐次逼近ADC的轉換速率范圍以內,但比不上轉換速率最低的閃速轉換ADC。表中沒有給出速率和精確度的折衷結果。例如,可以找到8至16位的逐次逼近ADC,但在給定的系列產品中16位ADC的轉換速率并不是最快的;而且在閃速ADC中,速率最快的不是12位ADC,而是6位或8位ADC。
上述圖表簡要描述了ADC技術的當前發展狀況。隨著CMOS工藝的不斷改進,逐次逼近轉換的時間已由以前的數十微秒迅速下降至數微秒。雖然并非所有的技術進步都將對所有類型的轉換器產生影響,CMOS工藝的改進仍將提高各類轉換器的速率,但在ADC芯片上添加更為復雜的DSP功能并不能改進逐次逼近轉換器的性能。DSP功能可以改進sigma-delta型ADC,因為該產品可以在芯片上添加更好、更快,也更復雜的濾波器。
采樣與保持
ADC轉換直流信號的工作原理簡單明了。但如果在轉換期間輸入信號的變化超過一個最低有效位(LSB),ADC將得到不正確(或至少是不精確)的結果。減小誤差的一種方法是在ADC之前添加低通濾波器,并選擇適當的參數以保證ADC的輸入在一個轉換周期中的變化不超過一個最低有效位。
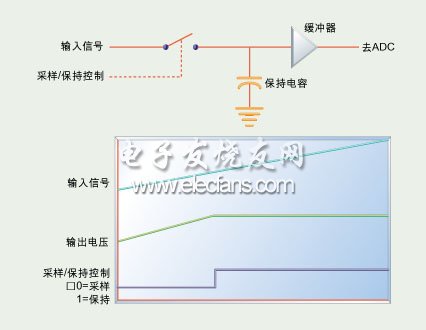
處理變化的輸入信號的另一種方法是在ADC之前添加采樣-保持(S/H)電路,圖3顯示了采樣-保持電路的工作原理。S/H電路具備帶有控制輸入的模擬(固態)開關,當開關閉合時,輸入信號將連接至保持電容,而緩沖器的輸出將跟蹤輸入。當開關開啟時,輸入信號將與保持電容斷開。
圖中還給出了S/H的工作波形,S/H輸入連接一個緩慢上升的信號,當控制信號較低時(采樣模式),輸出將跟蹤輸入;隨著控制信號的增強(保持模式),輸出將與輸入的保持電容斷開,并保持在S/H切換至保持模式時的輸入值。當電路再次閉合,電容迅速充電,輸出再次跟蹤輸入。通常S/H在ADC轉換開始前切換至保持模式,而當轉換結束后切回至采樣模式。
在理想條件下,保持電容不會發生漏電并且緩沖放大器具有無窮大的輸入阻抗,因此輸出將保持恒定。但在實際中,保持電容會漏電,而且緩沖放大器的輸入阻抗是有限的,因而輸出電平將隨著電容放電產生緩慢的漂移。
S/H電路在保持模式下保持輸出的性能取決于保持電容的質量、緩沖放大器(主要是輸入阻抗)的特性和采樣/保持開關(實際的電子開關在開路時總會有漏電)的質量。保持模式下輸出呈現出的漂移量稱為固定偏差率(droop rate),可用毫伏/秒、毫伏/微秒或微伏/微秒來表示。
實際中,S/H電路由于電子開關無法達到理想狀況而具有有限的輸入阻抗。這意味著在采樣模式下,保持電容需要通過某些電阻進行充電,這限制了S/H可獲取的輸入速率。S/H在采樣模式下為獲得滿刻度輸入所必須保持的采樣時間稱為采集時間,單位是納秒或微秒。
采樣時一些電阻與保持電容相串聯,這樣的效果等同于低通RC濾波器。這無疑限制了S/H所能獲取的最大頻率,該頻率稱為滿功率帶寬,單位是千赫或兆赫。
如前所述,由于電子開關無法達到理想狀況,某些輸入信號將出現在輸出中,即便在保持模式下也是如此,這種狀況稱為饋通,單位是分貝。
輸出偏移表示輸入信號與輸出信號之間的差異,S/H電路數據表通常以毫伏的形式表示保持模式下的偏移和采樣模式的偏移。
應用軟件
使用S/H的ADC系統必須能處理硬件異常情況。在某些系統中,軟件通過端口或寄存器輸出位直接控制S/H的控制輸入。S/H通常置為采樣模式,而軟件必須滿足采集時間要求。在某些系統中,這項工作的完成僅僅只需將S/H置為采樣模式,直到需要轉換為止。
當S/H置為保持模式后,另一位(或寫入地址,或進行其它操作)將啟動ADC。轉換完成后,軟件將讀取結果。然而,一旦異常中斷(或出現最壞情況的中斷堆棧)導致S/H的輸出電路變化至少一個最低有效位,將會出現問題。這種情況一旦發生,軟件必須在S/H切換至保持模式之前禁止中斷,并在開始轉換之前開放中斷,這樣就能保證ADC在發生S/H偏差之前完成轉換工作。
軟件還必須能調節S/H的充電時間。當電子開關閉合并與S/H電容的輸入信號連通時,電容必須在有限的時間內充電,因為此時開關和任何驅動輸入的電源都將具有非零阻抗。如果這些阻抗之和充分大,軟件將需要增加延遲,以使得保持電容在轉換之前,在終值的一個最低有效位變化以內有充分的時間進行充電。
內部微控制器ADC
許多微控制器均帶有片上ADC。典型的器件包括Microchip的PIC167C7xx系列產品和Atmel的AT90S4434。大多數微控制器ADC采用逐次逼近法,因為這種方法能對轉換速率和微控制器裸片空間成本進行最佳折衷。
PIC16C7xx微控制器包含一個帶有模擬輸入多路復用器的8位逐次逼近ADC。該系列微控制器具有4至8個通道,內部寄存器控制所選的通道并啟動轉換。輸入一旦選定,在啟動A/D轉換之前,必須經過一段穩定時間使S/H電容充電。軟件必須保證上述操作所需的延遲時間。
轉換精確度
一些微控制器(如Microchip系列產品)允許使用一個輸入引腳作為參考電壓,該引腳通常與某種精密參考電源相連。轉換后從A/D轉換器上讀取的值為:
(Vin/Vref)×256
某些微控制器使用電源電壓作為參考。在5V系統下,這意味著Vref為5V。因此采用8位ADC測量3.2V信號將得到如下結果:
(Vin×256)/Vref =(3.2v×256)/5V =16310 =A316
然而得到的結果還取決于5V電源值。如果電源電壓超過1%,即為5.05V,那么A/D轉換的結果將為:
(3.2V×256)/5.05V=16210=A216
因此電源電壓1%的變化將導致轉換結果計數改變1。典型電源的電壓變化范圍為2%或3%, 因此電源電壓的變化將對轉換結果產生顯著的影響。電源電壓的輸出常常受到電源間負載、溫度、交流輸入變化的影響。
這里提出了一個影響所有ADC設計的問題:參考電壓的精確度。典型的ADC參考電壓可為2.5V額定值,但可在2.47V和2.53V(這些數值來自數據表的實數部分)之間變化。如果采用10位的ADC,在上述給定的參考范圍極限條件下,轉換2V的輸入將得到如下結果:當Vref=2.47V時, 轉換結果=(2V×1,024)/2.47=82910;當Vref = 2.53V時,轉換結果=(2V×1,024)/2.53=80910。
各部分之間參考電壓的變化可導致輸出發生20個計數的變化。圖4顯示了參考變化對ADC結果的影響。盡管誤差的百分比在整個范圍內維持不變,但ADC值越大,誤差值顯然也越大。
?
軟件校正
有時由于需要得到精確的參考電壓,對精確度的要求甚至超過了產品成本所能承受的范圍。當無法進行手工調節時,即可采用軟件來補償參考電壓的變化。這通常可通過提供已知的用于校正ADC的精確輸入來實現。這個參考電壓可以非常精確(當然也非常昂貴),因為只有很少的生產線需要這類參考電壓。
在上述2.47V示例中,ADC的輸入可采用2V的精確電壓。當軟件讀取ADC時,知道正確的值應為819,由此校正常數為829/819,或1.012。類似地,2.53V參考電壓的校正常數為809/819,或0.988。
這意味著需要浮點運算來校正ADC值。如果使用的處理器可處理浮點運算,那么這種方法就是可取的。但對于比較簡單的處理器,則有可能不具備必要的處理時間或代碼空間來實現浮點運算。
進行ADC校正的一種有效方法是查表。但該方法的缺陷是需要足夠大的固定存儲器來維持對應于每個可能的ADC值的查表值,對于10位的ADC,查表需要1024字的存儲空間。
電壓參考與其額定值相當接近,否則就不能稱其為參考了。假定在工作溫度中參考電壓足夠穩定,ADC誤差占ADC讀數值的百分比將是恒定的。因為ADC具有有限的分辨率,精度校正ADC誤差的精度不會大于1LSB。
這樣我們就可按下面給出的方法簡化ADC的校正工藝。作為查詢表的替代,我們可以另外存儲一個值,該值通知軟件將要從ADC讀取值中添加或刪除的(二進制)百分比,由此校正誤差。我們可以添加或刪除輸入的1/8、1/16或1/24,但都將導致精確度下降1 LSB。我們只需存儲單個校正常數,而除法運算則可由一系列移位加或移位減運算實現。
上述2.47V示例可由ADC值與.988相乘的結果加以校正,也可通過初始值減去1/128,再減去1/256和1/512得到相同的結果。在初始的2V示例中,采用整數表示法,可得到如下結果:
829-829/128-829/156-829/512 =829-6-3-1 =819
上述結果將ADC讀取值校正為819,這是額定參考電壓為2.5V條件下的理想值。類似地,2.53V參考電壓可通過增加1/128 和1/256加以校正。
我們還必須確信在期望的工作溫度范圍內參考電壓充分穩定,否則在期望溫度附近只能得到較好的校正結果。如果參考電壓的溫度穩定性不夠好,那么必須選擇更好的參考電壓,或者將工作溫度范圍分為多個段并在每個段上使用不同的校正值。當然,這也意味著需要使用熱敏電阻或其它方法來測量溫度。
該方法通過對移位結果進行截斷舍入而實現舍入誤差處理。在2.47V示例給出的電子表格中,所有情形下的校正值均在理想值的兩個計數以內。大多數校正值都是正確無誤的,或者僅偏差一個計數。2V輸入條件下得到的校正結果明顯優于最初的偏差(10個計數),這正好滿足了諸多應用系統的需要。如果應用系統連這點偏差都無法承受,那么確實需要更好的參考電壓或者求助于手工調節。
校正技術同樣可用來補償其它系統的不精確度,如電阻累計誤差。如果所測量的系統包含電壓輸入,即可在輸入中應用精確電壓,并進行適當的校正,由此在ADC中補償參考輸入的變化并在輸入條件下補償電阻公差的影響。










 工商網監
工商網監
評論