 電子發燒友App
電子發燒友App


首 先,讓我們考察一下如何利用模型校驗工具驗證簡單的嵌入式系統特性。為此,我們采用Carnegie-Mellon大學開發的符號模型驗證器 (symbolic model verifier,SMV)作為模型校驗工具。當然,我們也可以采用其他的模型校驗工具描述該模型。文章結束部分列出了可選的模型校驗工具及獲取方式。
如 圖2所示,一個簡單的泵控系統通過泵P將源水槽A中的水傳送至接收水槽B。每個水槽都具有兩級刻度線:一個用來檢測水位是否為空(Empty),而另一個 用來檢測水位是否已滿(Full)。如果水槽的水位既不為空也不為滿,那么水槽刻度線設定為ok;換言之,即水位高于空刻度線但低于滿刻度線。
最 初,兩個水槽均為空。一旦水槽A的水位值為ok(從空開始),啟動泵并假定水槽B尚未為滿。只要水槽A不為空且水槽B不為滿,泵將持續工作。一旦水槽A為 空或水槽B為滿,泵將停止工作。一旦泵啟動(或停止),系統將不會嘗試停止(或啟動)泵。雖然這個示例非常簡單,但可以很容易地擴展為控制多個源水槽和接 收水槽的復雜泵管線網絡控制器,如應用在水處理系統或化工廠中的控制器。
表1:SMV模型描述和需求清單。
MODULE main
VAR
level_a : {Empty, ok, Full}; -- lower tank
level_b : {Empty, ok, Full}; -- upper tank
pump : {on, off};
ASSIGN
next(level_a) := case
level_a = Empty : {Empty, ok};
level_a = ok & pump = off : {ok, Full};
level_a = ok & pump = on : {ok, Empty, Full};
level_a = Full & pump = off : Full;
level_a = Full & pump = on : {ok, Full};
1 : {ok, Empty, Full};
esac;
next(level_b) := case
level_b = Empty & pump = off : Empty;
level_b = Empty & pump = on : {Empty, ok};
level_b = ok & pump = off : {ok, Empty};
level_b = ok & pump = on : {ok, Empty, Full};
level_b = Full & pump = off : {ok, Full};
level_b = Full & pump = on : {ok, Full};
1 : {ok, Empty, Full};
esac;
next(pump) := case
pump = off & (level_a = ok | level_a = Full) &
(level_b = Empty | level_b = ok) : on;
pump = on & (level_a = Empty | level_b = Full) : off;
1 : pump; -- keep pump status as it is
esac;
INIT
(pump = off)
SPEC
-- pump if always off if ground tank is Empty or up tank is Full
-- AG AF (pump = off -> (level_a = Empty | level_b = Full))
-- it is always possible to reach a state when the up tank is ok or Full
AG (EF (level_b = ok | level_b = Full))
該系統的模型的SMV建模如表1所示。起始的VAR部分定義了系統的3個狀態變量,變量level_a和level_b分別記錄了上層水槽(upper tank)和下層水槽(lower
?
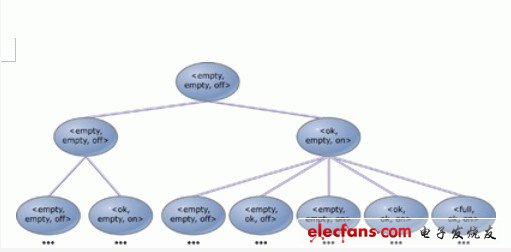
圖3:泵控系統執行樹的初始部分。
tank)的當前水位;在每個“時刻”,這兩個變量都將分別賦值,取值范圍為Empty、ok或Full。變量pump表征了泵的啟動(on)和停止(off)。
系 統狀態就可用上述3個變量的不同取值來表示。例如(level_a=Empty, level_b=ok, pump=off)和l (level_a=Empty, level_b=Full, pump=on)就可以表示系統狀態。在靠近結尾的INIT部分,定義了這些變量的初始值(這里,最初假定pump的初始值為off,而其他兩個變量則可 取任意值)。
ASSIGN部分定義了系統如何從一個狀態遷移到另一個狀態。每個next語句都規定了特定變量的取值變化。所 有這些賦值語句都假定可以并行執行;next語句定義為在該部分執行所有賦值語句后的最終結果。下層水槽的狀態可以從Empty狀態遷移到Empty或 ok狀態;從ok狀態遷移到Empty或Full狀態,或保持為ok狀態(如果pump的狀態為on);從ok狀態遷移到ok或Full狀態(如果 pump的狀態為off);如果pump狀態為off,那么下層水槽在Full狀態無法發生狀態遷移;如果泵狀態為on,則可遷移到ok或Full狀態。 上層水槽也可規定類似的操作。
在系統內部,大多數模型校驗工具通常會將輸入模型擴展為具有Kripke結構的動態系統。擴展 過程包括在EFSM中除去分層結構、并行成分以及狀態遷移時的告警和操作。Kripke結構中的每個狀態實際上都可用每個狀態均賦值的元組(tuple) 來表示。Kripke結構中的狀態遷移表征了一個或多個狀態變量取值的變化;而且還可以比較通過擴展給定模型而得到的Kripke結構,對指定的系統屬性 進行校驗。然而,為了更好地理解每條屬性語句的含義,Kripke結構還必須進一步擴展為無限樹形結構,其中樹形結構的每個分支都表征了系統可能的執行操 作或行為。







 工商網監
工商網監
評論