 電子發燒友App
電子發燒友App


單片機被廣泛應用于工業控制,家電,消費電子,醫療電子,儀表測量等領域,為應廣大初級電子工程師/單片機愛好者之需,電子發燒友網隆重策劃整合推出《單片機關鍵技術基礎詳解》系列技術文章,以后會陸續推出其他章節,敬請廣大工程師朋友繼續關注和留意。應廣大工程師網友對前面章節熱烈反響,電子發燒友網會再接再厲為各位工程師網友推出更多技術精品系列文章,以饗讀者。
參閱相關系列章節
一、單片機矩陣鍵盤原理與結構
矩陣式結構的鍵盤識別要復雜一些,列線通過電阻接正電源,并將行線所接的單片機的I/O口作為輸出端,而列線所接的I/O口則作為輸入。這樣,當按鍵沒有按下時,所有的輸入端都是高電平,代表無鍵按下。行線輸出是低電平,一旦有鍵按下,則輸入線就會被拉低,這樣,通過讀入輸入線的狀態就可得知是否有鍵按下了。
在矩陣式鍵盤中,每條水平線和垂直線在交叉處不直接連通,而是通過一個按鍵加以連接。這樣,一個端口(如P1口)就可以構成4*4=16個按鍵,比之直接將端口線用于鍵盤多出了一倍,而且線數越多,區別越明顯,比如再多加一條線就可以構成20鍵的鍵盤,而直接用端口線則只能多出一鍵(9鍵)。由此可見,在需要的鍵數比較多時,采用矩陣法來做鍵盤是合理的。
《1》確定矩陣式鍵盤上何鍵被按下介紹一種“行掃描法”。
行掃描法 行掃描法又稱為逐行(或列)掃描查詢法,是一種最常用的按鍵識別方法,如上圖所示鍵盤,介紹過程如下。
1、判斷鍵盤中有無鍵按下 將全部行線Y0-Y3置低電平,然后檢測列線的狀態。只要有一列的電平為低,則表示鍵盤中有鍵被按下,而且閉合的鍵位于低電平線與4根行線相交叉的4個按鍵之中。若所有列線均為高電平,則鍵盤中無鍵按下。
2、判斷閉合鍵所在的位置 在確認有鍵按下后,即可進入確定具體閉合鍵的過程。其方法是:依次將行線置為低電平,即在置某根行線為低電平時,其它線為高電平。在確定某根行線位置為低電平后,再逐行檢測各列線的電平狀態。若某列為低,則該列線與置為低電平的行線交叉處的按鍵就是閉合的按鍵。
《2》確定矩陣式鍵盤上何鍵被按下介紹一種“高低電平翻轉法”。
首先讓P1口高四位為1,低四位為0,。若有按鍵按下,則高四位中會有一個1翻轉為0,低四位不會變,此時即可確定被按下的鍵的行位置。
然后讓P1口高四位為0,低四位為1,。若有按鍵按下,則低四位中會有一個1翻轉為0,高四位不會變,此時即可確定被按下的鍵的列位置。
最后將上述兩者進行或運算即可確定被按下的鍵的位置。
更多矩陣鍵盤的資料請訪問http://m.xsypw.cn/zhuanti/20111025226587.html
二、什么是格雷碼
格雷碼(Gray code),又叫循環二進制碼或反射二進制碼 在數字系統中只能識別0和1,各種數據要轉換為二進制代碼才能進行處理,格雷碼是一種無權碼,采用絕對編碼方式,典型格雷碼是一種具有反射特性和循環特性的單步自補碼,它的循環、單步特性消除了隨機取數時出現重大誤差的可能,它的反射、自補特性使得求反非常方便。格雷碼屬于可靠性編碼,是一種錯誤最小化的編碼方式
簡介
因為,自然二進制碼可以直接由數/模轉換器轉換成模擬信號,但某些情況,例如從十進制的3轉換成4時二進制碼的每一位都要變,使數字電路產生很大的尖峰電流脈沖。而格雷碼則沒有這一缺點,它是一種數字排序系統,其中的所有相鄰整數在它們的數字表示中只有一個數字不同。它在任意兩個相鄰的數之間轉換時,只有一個數位發生變化。它大大地減少了由一個狀態到下一個狀態時邏輯的混淆。另外由于最大數與最小數之間也僅一個數不同,故通常又叫格雷反射碼或循環碼。
2、格雷碼對照表
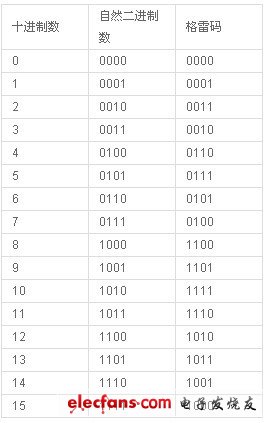
下表為幾種自然二進制碼與格雷碼的對照表:
一般的,普通二進制碼與格雷碼可以按以下方法互相轉換:
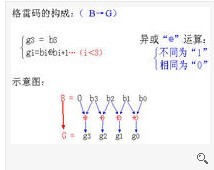
二進制碼-》格雷碼(編碼):從最右邊一位起,依次將每一位與左邊一位異或(XOR),作為對應格雷碼該位的值,最左邊一位不變(相當于左邊是0);
格雷碼-〉二進制碼(解碼):從左邊第二位起,將每位與左邊一位解碼后的值異或,作為該位解碼后的值(最左邊一位依然不變)。
數學(計算機)描述:
原碼:p[n:0];格雷碼:c[n:0](n∈N);編碼:c=G(p);解碼:p=F(c);
書寫時按從左向右標號依次減小,即MSB-》LSB,編解碼也按此順序進行
編碼:
。..。..。..。..。..。...c[n]=p[n],
。..。..。..。..。..。...c[i]=p[i] XOR p[i+1] (i∈N,n-1≥i≥0);
解碼:
。..。..。..。..。..。...p[n]=c[n],
。..。..。..。..。..。...P[i]=c[i] XOR p[i+1] (i∈N, n-1≥i≥0)。
Gray Code是由貝爾實驗室的Frank Gray在20世紀40年代提出的(是1880年由法國工程師Jean-Maurice-Emlle
Baudot發明的),用來在使用PCM(Pusle Code Modulation)方法傳送訊號時避免出錯,并于1953年3月17日取得美國專利。由定義可知,Gray Code的編碼方式不是唯一的,這里討論的是最常用的一種。
用異或乘除法實現二進制碼與格雷碼互相轉換
如果在二進制運算中忽略進位、退位,那么加減運算都變成了異或(XOR)。
用異或代替加減進行二進制豎式乘除,稱為異或乘除,它的特點是無進退位。
由于沒有退位,異或除法將變得更像多項式除法。
如:10101除以11將變成1100余1,而不是111。
二進制轉格雷碼:
只要異或乘以二分之三,即二進制的1.1,然后忽略小數部分;也可以理解成異或乘以三(即11),再右移一位。
格雷碼轉二進制:
異或乘以三分之二,即除以1.1,忽略余數;或者左移一位,再異或除以三,忽略余數。
格雷碼轉二進制方法
二進位碼第n位 = 二進位碼第(n+1)位+格雷碼第n位。因為二進位碼和格雷碼皆有相同位數,所以二進位碼可從最高位的左邊位元取0,以進行計算。(注:遇到1+1時結果視為0)
例如: 格雷碼0111,為4位數,所以其所轉為之二進位碼也必為4位數,因此可取轉成之二進位碼第五位為0,即0 b3 b2 b1 b0。
0+0=0,所以b3=0
0+1=1,所以b2=1
1+1取0,所以b1=0
0+1取1,所以b0=1
因此所轉換為之二進位碼為0101
格雷碼轉換快速方法
(假設以二進制為0的值做為格雷碼的0)
G:格雷碼 B:二進位碼
G(N) = B(n+1) XOR B(n)

三、AVR單片機開發經驗
AVR與傳統類型的單片機相比,除了必須能實現原來的一些基本的功能,其在結構體系、功能部件、性能和可靠性等多方面有很大的提高和改善。
但使用更好的器件只是為設計實現一個好的系統創造了一個好的基礎和可能性,如果還采用和沿襲以前傳統的硬件和軟件設計思想和方法的話,是不能用好AVR的,甚至也不能真正的了解AVR的特點和長處。
功能越好的器件,需要具備更高技術和能力的人來使用和駕馭它。就象一部好的F1賽車,只有具備高超技術的駕駛員才能充分體會到車的特點,并能最大限度的發揮出車的性能。
AVR具有上手入門快,開發方便簡單的特點,但要充分體會和發揮AVR的優點,還需要應用工程師本身的硬軟件設計開發能力的不斷學習、實踐提高。
“外行看熱鬧,內行看門道”,對于有一定基礎的嵌入式和單片機系統設計開發的工程師,不妨先簡單嘗試一下AVR。
開發環境與工具:PC+下載線+實際的系統板
PC上的開發軟件:
AVR Studio(Free)匯編+匯編調試+高級語言調試+軟件仿真
ICC、CVAVR、BASCOM-AVR 高級語言程序開發+程序下載。其中一個購買正版全功能,作為主要的開發環境,其它使用DEMO版,作為輔助及參考。
AVR ISP下載線:
STK200 And STK200+ And STK300 ISP Programmer。通過PC的打印機口,采用ISP技術將系統運行代碼(HEX、BIN)和數據寫入AVR芯片的Flash和EEProm中,編程AVR的配置熔絲位和加密位。支持決大多數的AVR芯片、以及ATMEL的51兼容芯片89S8252、89S52等。在ICC、CVAVR、BASCOM-AVR、BASCOM-8051中都內含對該下載線的支持程序。免費專用的下載程序:SLISP、PonyProg2000等。
盡量不使用仿真器的建議:
在開發和調試系統程序時,有許多人完全依賴于仿真器,一旦離開了仿真器時就感覺無從下手。其實,由于AVR的Flash存貯器可方便的使用ISP技術在線的多次擦寫,因此建議盡量不使用(依賴)仿真器來開發和調試程序。
在實際開發過程中,程序的調試可以從下幾方面入手:
現在的高級語言編譯器(如C編譯器)可以產生效率很高的機器代碼,因此建議大家盡量使用高級語言編寫系統程序。
使用Atmel公司提供AVR Studio軟件模擬仿真環境,以及其他的軟件模擬仿真環境(BASCOM-AVR)。
盡可能使用高級語言編寫系統程序。
利用目標板上的LED、LCD或異步串口。見附件“沒有仿真器的情況下如何開發AVR”的介紹。
提高硬件設計的合理性:
盡量合理和充分使用AVR片內的資源,如EEPROM、A/D、內部的RC振蕩源。
盡量采用串口通信連接的外圍器件,大容量的存儲器、LCD控制器、打印機、不用8279(LED數碼管+鍵盤)而使用7279等。除了必須外擴RAM(如語音和圖象),一般不提倡使用并行擴展(573+譯碼電路),減小硬件和連線以及PCB板上錯誤的出現概率,同時也提高了系統的可靠性。并行擴展向串行擴展是發展趨勢。現在有大量的新的外圍器件采用高速的串行接口,如A/D、D/A、RTC、存儲器等。
盡量使用以及在目標板上預留ISP程序下載接口,或使用IAP技術。
優點:ISP接口與I/O的兼容性比JETAG好。
缺點:不能在線調試
注意和掌握AVR配置熔絲位的使用:
。 系統晶振的選擇
.BOD的使用
。啟動延時.Mega8的PC6引腳,RESET與通用I/O的轉換
.JETAG接口和通用I/O的轉換
。啟動向量的轉換,BOOT-LOAT區大小的設置
提高硬件可靠性的考慮:
。盡量采用片內晶體、采用低頻率的系統時鐘、振蕩電路的輸出小幅度。
。選擇合適的啟動延時參數
。使用BOD、片內的看門狗
。合理休眠方式的使用
。不用I/O口設定輸出低電平
。利用內部的EEProm和寄存器MCUCSR判斷復位標志,進行不同的處理
提高軟件設計的能力和水平:
盡量合理采用高級語言設計編寫系統程序。有許多人認為使用匯編寫程序比較精簡,而用高級語言開發會浪費很多程序空間,其實這是一種誤解。對一個有經驗的,而且非常熟悉某種單片機的匯編高手而言,他是能寫出比高級語言更精簡的代碼。而對匯編不是很熟的開發者、或突然更換了一種新的單片機,您能保證一定可以寫出比高級語言更簡練的代碼嗎?
高級語言的優越性是匯編語言不能比的:
。程序移植方便
。程序的堅固性
。數學運算的支持
。條理清晰的結構化編程,程序的可維護性。
。可協同開發軟件,開發周期短。
現在的高級語言編譯器(如C編譯器)已可以產生代碼效率很高的機器代碼,因此建議大家能用高級語言實現的程序盡可能使用高級語言寫,在對速度和時序要求特嚴的場合可以采用混合編程的方法來解決。
更深入和全面的掌握各種串行通信協議的規程:
嵌入式系統目前以大量的使用串行接口外圍芯片和各種通信接口,如RS232、兩線(I2C)、三線(SPI)、單總線、USB、CAN、TCP/IP等。開發人員和程序員應了解低層協議,熟悉硬件怎樣和如何實現低層協議,如何定義可靠的上層應用協議,以及低層協議驅動同上層應用協議之間的接口設計(中間層軟件的實現)等。
硬件工程師的軟件編寫能力要提高,采用標準程序編寫方式、完善的軟件整體框架的設計、良好的數據結構和程序結構系統。(計算機軟件專業的程序設計員對硬件不熟悉、大部分是在操作系統支持下編寫軟件,對低層接口和協議的驅動層以及接口也不了解,往往也編寫不出好的單片機系統程序。)
通信接口的編寫應盡量
。采用中斷+緩沖區,
。分層+結構化設計,
。盡量不使用輪循方式(降低AVR的效率)。參見URAT(RS232)驅動+中間層軟件示例。
采用好的系統設計模式:
盡量不使用傳統的前后臺(中斷)系統設計模式,任務之間相互影響和干擾,無法定時操作。如設計一個采用動態掃描方式驅動的8位LED數碼管顯示+動態掃描的4*4矩陣鍵盤。
采用TimeTip+狀態機設計+CASE結構,實現多任務并行運行系統設計方法。或時間觸發式的系統設計。(見:《時間觸發嵌入式系統設計模式》中國電力出版社 2004.6)
移植小型嵌入式操作系統,如UCOS-II。在網上有些免費的基于AVR的簡潔的操作系統。
提高C語言的編程能力和軟件應用水平:
熟悉和用好C中的數據結構體、指針應用、內存管理等較高級的應用。
熟悉和了解你所使用的高級語言開發平臺的特點。這些平臺是針對某一類處理器的,包含許多特殊的不兼容的語句和擴展的結構、語句、函數等。盡管使用方便,但由于其不透明性和時間的不確定性,因此要合理使用。如C中的Getchar()、Putchar()等。AVR有多個開發平臺,每個都有其特點和不足。能夠綜合使用這些平臺,相互互補,能夠提高開發效率。如通過ICC、CVAVR的程序生成器CodeWizard學習和了解AVR的硬件設置,簡化計算,快速的生成程序基本模塊,如“一個URAT(RS232)低層驅動+中間層軟件示例”。
四、AVR單片機定時器輸出PWM的設計及注意問題
一、定時/計數器PWM設計要點
根據PWM的特點,在使用ATmega128的定時/計數器設計輸出PWM時應注意以下幾點:
1.首先應根據實際的情況,確定需要輸出的PWM頻率范圍,這個頻率與控制的對象有關。如輸出PWM波用于控制燈的亮度,由于人眼不能分辨42Hz以上的頻率,所以PWM的頻率應高于42Hz,否則人眼會察覺到燈的閃爍。
2.然后根據需要PWM的頻率范圍確定ATmega128定時/計數器的PWM工作方式。AVR定時/計數器的PWM模式可以分成快速PWM和頻率(相位)調整PWM兩大類。
3.快速PWM可以的到比較高頻率的PWM輸出,但占空比的調節精度稍微差一些。此時計數器僅工作在單程正向計數方式,計數器的上限值決定PWM的頻率,而比較匹配寄存器的值決定了占空比的大小。PWM頻率的計算公式為:
PWM頻率 = 系統時鐘頻率/(分頻系數*(1+計數器上限值))
4.快速PWM模式適合要求輸出PWM頻率較高,但頻率固定,占空比調節精度要求不高的應用。
5.頻率(相位)調整PWM模式的占空比調節精度高,但輸出頻率比較低,因為此時計數器僅工作在雙向計數方式。同樣計數器的上限值決定了PWM的頻率,比較匹配寄存器的值決定了占空比的大小。PWM頻率的計算公式為:
PWM頻率 = 系統時鐘頻率/(分頻系數*2*計數器上限值))
6.相位調整PWM模式適合要求輸出PWM頻率較低,但頻率固定,占空比調節精度要求高的應用。當調整占空比時,PWM的相位也相應的跟著變化(Phase Correct)。
7.頻率和相位調整PWM模式適合要求輸出PWM頻率較低,輸出頻率需要變化,占空比調節精度要求高的應用。此時應注意:不僅調整占空比時,PWM的相位會相應的跟著變化;而一但改變計數器上限值,即改變PWM的輸出頻率時,會使PWM的占空比和相位都相應的跟著變化(Phase And Frequency Correct)。
8.在PWM方式中,計數器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。或由用戶設定的0x0000-0xFFFF,設定值在16位T/C的ICP或OCRA寄存器中。而比較匹配寄存器的值與計數器上限值之比即為占空比。
二、 PWM應用參考設計
下面給出一個設計示例,在示例中使用PWM方式來產生一個1KHz左右的正弦波,幅度為0-Vcc/2。
首先按照下面的公式建立一個正弦波樣本表,樣本表將一個正弦波周期分為128個點,每點按7位量化(127對應最高幅值Vcc/2):
F(X) = 64 + 63 * Sin(2πx/180) X∈[0…127]
如果在一個正弦波周期中采用128個樣點,那么對應1KHz的正弦波PWM的頻率為128KHz。實際上,按照采樣頻率至少為信號頻率的2倍的取樣定理來計算,PWM的頻率的理論值為2KHz即可。考慮盡量提高PWM的輸出精度,實際設計使用PWM的頻率為16KHz,即一個正弦波周期(1KHz)中輸出16個正弦波樣本值。這意味著在128點的正弦波樣本表中,每隔8點取出一點作為PWM的輸出。
程序中使用ATmega128的8位T/C0,工作模式為相位調整PWM模式輸出,系統時鐘為8MHz,分頻系數為1,其可以產生最高PWM頻率為: 8000000Hz / 510 = 15686Hz。每16次輸出構成一個周期正弦波,正弦波的頻率為980.4Hz。PWM由OC0(PB4)引腳輸出。參考程序如下(ICCAVR)。
//ICC-AVR Application Builder : 2004-08
// Target : M128
// Crystal: 8.0000Mhz
#Include
#Include
#Pragma Data:code
// 128點正弦波樣本表
Const Unsigned Char Auc_SinParam[128] = {
64,67,70,73,76,79,82,85,88,91,94,96,99,102,104,106,109,111,113,115,117,118,120,121,
123,124,125,126,126,127,127,127,127,127,127,127,126,126,125,124,123,121,120,118,
117,115,113,111,109,106,104,102,99,96,94,91,88,85,82,79,76,73,70,67,64,60,57,54,51,48,
45,42,39,36,33,31,28,25,23,21,18,16,14,12,10,9,7,6,4,3,2,1,1,0,0,0,0,0,0,0,1,1,2,3,4,6,
7,9,10,12,14,16,18,21,23,25,28,31,33,36,39,42,45,48,51,54,57,60};
#Pragma Data:data
Unsigned Char X_SW = 8,X_LUT = 0;
#Pragma Interrupt_handler Timer0_ovf_isr:17
Void Timer0_ovf_isr(Void)
{
X_LUT += X_SW; // 新樣點指針
If (X_LUT 》 127) X_LUT -= 128; // 樣點指針調整
OCR0 = Auc_SinParam[X_LUT]; // 取樣點指針到比較匹配寄存器
}
Void Main(Void)
{
DDRB |= 0x10; // PB4(OC0)輸出
TCCR0 = 0x71; // 相位調整PWM模式,分頻系數=1,正向控制OC0
TIMSK = 0x01; // T/C0溢出中斷允許
SEI(); // 使能全局中斷
While(1)
{……};
}
每次計數器溢出中斷的服務中取出一個正弦波的樣點值到比較匹配寄存器中,用于調整下一個PWM的脈沖寬度,這樣在PB4引腳上輸出了按正弦波調制的PWM方波。當PB4的輸出通過一個低通濾波器后,便得到一個980.4Hz的正弦波了。如要得到更精確的1KHz的正弦波,可使用定時/計數器T/C1,選擇工作模式10,設置ICR1=250為計數器的上限值。
五、C51單片機矩陣鍵盤掃描去抖程序
這段有1個C51的項目,用的是新華龍的C51 F020單片機。項目中要使成為事實4*5的矩陣鍵盤。矩陣電路圖如次如示
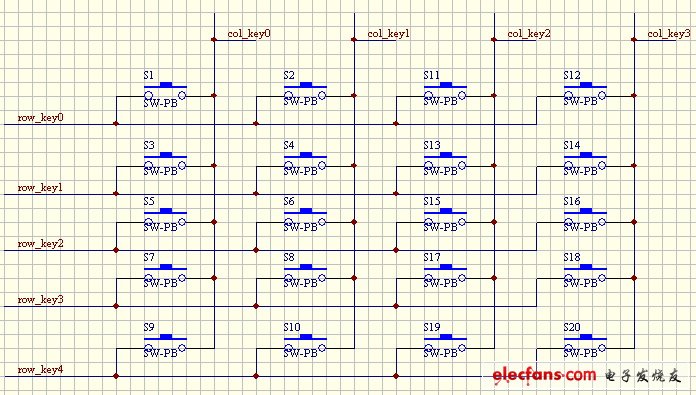
此中,四條列線接在 F020的P2~P5口線上,5條行線接在P5口線上(F020的P5口是差別于平凡C51的擴大接口,不克不及位尋址)。同時4條列線接在一四輸入與非門(74LS20)上,門輸出接F020的外間斷1,如許,不論什么一鍵按下,都會孕育發生間斷,報信程序舉行鍵盤電子掃描。
托1個新手給寫了鍵盤的電子掃描程序,基本功效都能使成為事實,但對鍵盤的去抖措置懲罰老是做欠好,體現是或不克不及去抖,或按鈕相應太卡,或采集到紕繆鍵值。看來新手對矩陣鍵盤電子掃描原理掌握較好(網上資料多),但對鍵盤去抖的知識卻有所欠缺,基本都是按照書上說的延時一段時間再采集鍵值,現實應用中,如許的措置懲罰是遠遠不敷的,過于簡單。現實去抖措置懲罰應該如許舉行更合理一些,即連續采集鍵值,當采集到的鍵值在一段時間內是不異的,即以為按鈕狀況已經穩定,此鍵值為真實鍵值。別的,按鈕開釋時,也會有抖動,導致誤采鍵值,是以在鍵開釋時,也應舉行去抖措置懲罰,措置懲罰要領同時是連續一段時間采集到無鍵按下狀況,才以為按鈕被開釋。按照這個要領,我重寫了新手的程序,現實應用中體現極好。
現將程序發布如次,供新手參考。
Key.h文件內容
#ifndef __key_H__
#define __key_H__
#define 滅茬_KEY 0x0000
#define S1 0x3801
#define S2 0x3401
#define S3 0x3802
#define S4 0x3402
#define S5 0x3804
#define S6 0x3404
#define S7 0x3808
#define S8 0x3408
#define S9 0x3810
#define S10 0x3410
#define S11 0x2C01
#define S12 0x1C01
#define S13 0x2C02
#define S14 0x1C02
#define S15 0x2C04
#define S16 0x1C04
#define S17 0x2C08
#define S18 0x1C08
#define S19 0x2C10
#define S20 0x1C10
#define KEY_DELAY 20
extern unsigned int Key_Value;
extern void Init_Key();
extern void Scan_Key();
extern bit Key_Pressed;
extern bit Key_Released;
extern unsigned int idata Keypress_Count;
extern unsigned int idata Keyrelease_Count;
#endif
key.c 文件內容
#include
#include “key.h”
bit Key_Down; //是不是有鍵按下的標記
unsigned int idata Keypress_Count;
sbit Col_Key0 = P2^2;
sbit Col_Key1 = P2^3;
sbit Col_Key2 = P2^4;
sbit Col_Key3 = P2^5;
bit Key_Pressed;
bit Key_Released;
unsigned int Key_Value; bit Key_Down; //是不是有鍵按下的標記
unsigned int idata Keypress_Count; //一毫秒增加一次的變量
unsigned int idata Keyrelease_Count; //一毫秒增加一次的變量
//矩陣鍵盤施用間斷1作為鍵盤間斷
void Init_Key()
{
P5 = 0; //行線全數置為0
EX1 = 1; // 允許外部鐘表秒間斷
IT1 = 1; // 外部鐘表間斷配備布置為邊緣觸發
}
void Key_Int() interrupt 2
{
Key_Pressed = 1;
EX1 = 0;
}
void Scan_Key()
{
unsigned char temp,rowvalue;
unsigned int key;
int i;
temp = P2;
temp &= 0x3C;
if(temp == 0x3C)
{
Key_Released = 0;
Key_Pressed = 0;
key = 滅茬_KEY;
EX1 = 1;
}
else
{
key = temp;
key = key《《8;
rowvalue = 0x01;
for(i=0;i《5;i )
{
P5 = rowvalue《
DelayMs⑴;
temp = P2;
temp &= 0x3C;
if(temp == 0x3c)
{
rowvalue = rowvalue《
key = key | rowvalue;
P5 = 0x00;
break;
}
}
P5 = 0x00;
DelayMs⑴;
}
if(key!=滅茬_KEY) //如果有鍵按下
{ if(key==Key_Value) //如果按下的是不異的鍵
{
if(Keypress_Count》=KEY_DELAY)
{
Key_Down = 1;
}
}
else if(Key_Down != 1)
{
Keypress_Count=0;
Keyrelease_Count = 0;
Key_Value=key;
}
}
else //如果無鍵按下
{
if(Key_Down) //如果時下是鍵開釋,返回鍵值
{
if(Keyrelease_Count 》= KEY_DELAY)
{
Key_Down=0;
Keypress_Count=0;
Keyrelease_Count=0;
Key_Released = 1;
EX1 = 1;
return;
}
}
else
{
Keypress_Count=0;
Keyrelease_Count=0;
Key_Value = 滅茬_KEY;
EX1 = 1;
return;
}
}
}
在main.c中的挪用要領為
if(Key_Pressed == 1)
{
//Key_Pressed = 0;
Scan_Key();
}
if(Key_Released == 1)
{
Key_Released = 0;
Ack_Key();
}
更多矩陣鍵盤的資料請訪問http://m.xsypw.cn/zhuanti/20111025226587.html
?











 工商網監
工商網監
評論