共享前段時間做自平衡小車時MPU6050的資料適用于自平衡小車,四軸飛行器。
2013-09-01 19:54:20
最近想做一個兩輪的自平衡車,所以先研究了一下姿態(tài)檢測模塊MPU6050模塊,使用DMP運(yùn)動解算模塊方便求得姿態(tài)角,使用串口打印出檢測到的姿態(tài)角數(shù)據(jù)。方便大家在用到這個模塊時,可以參考一下。
2017-10-27 20:39:16
兩輪自平衡小車兩輪自平衡車特點(diǎn):1、小車底盤使用的是一體成型的鈑金件,且表面做了黑色陽極化處理,更耐臟,更堅固,而非其他的使用亞克力固定電機(jī)座的做法。2、上兩層使用黑色亞克力,與底盤渾然一體,更加
2019-06-03 17:11:43
最近在做兩輪平衡車,網(wǎng)上都有很多成功的兄弟,所以自己來做,用的是MPU6050(互補(bǔ)濾波),用stm32控制小車,電機(jī)采用的是42步進(jìn)電機(jī)(A4988驅(qū)動),結(jié)果在做PID控制時,發(fā)現(xiàn)電機(jī)因為頻繁
2019-02-12 06:36:01
STM32野火平衡小車之如何搭建之PID與MPU6050初始化
2021-10-13 06:04:02
兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車兩輪平衡小車
2014-07-20 21:07:30
兩輪平衡小車完整資料
2014-07-28 08:54:04
兩輪平衡小車是用51單片機(jī)好,還是stm32好?
2023-10-08 08:27:06
賽格威兩輪載人平衡車2013年春,在一次偶然的機(jī)會接觸到真實(shí)版的兩輪載人平衡車,試駕了一下感覺不是一般的爽啊!作為機(jī)械電子專業(yè)畢業(yè)的我,心里就有想買的沖動,上網(wǎng)一查,美國的那個賽格威一臺好幾
2014-09-27 09:52:25
做一個兩輪自平衡小車,用陀螺儀怎樣使小車保持平衡,小車的重心怎樣測量
2012-12-04 16:39:35
兩輪自平衡小車一直是近幾年來畢設(shè),課設(shè)的熱點(diǎn),這回帶來一片比較優(yōu)秀的設(shè)計,有完整代碼的1.原理圖架構(gòu)大概整理了一下原理圖的結(jié)構(gòu),少了電源部分,電源是電池供電,輸入7.2~8V左右,用兩個LDO,變成
2022-01-20 07:40:33
本帖最后由 richthoffen 于 2019-7-19 16:40 編輯
兩輪自平衡小車資料
2019-07-18 12:29:28
兩輪自平衡小車資料
2020-05-09 09:14:37
兩輪自平衡小車資料
2020-05-09 09:14:37
主要有兩種:一種是底端固定的,另一種是底端沿著固定的軌道運(yùn)動,其中大部分在直線軌道上運(yùn)行。兩輪自平衡小車則是一個底端可以自由移動的三自由度倒立擺系統(tǒng)。增加了控制的難度。安裝在小車上的傾角計實(shí)時地反饋小車的偏角于控制器,控制器通過先進(jìn)的控制策略實(shí)時計算輸出兩車輪的力矩來控制小車的平衡。
2011-03-07 11:11:36
EFM32平臺自平衡小車制作材料單: 控制板:EFM32wg-stk 3800 小車底盤:兩輪自平衡小車底盤總成。 傳感器: MPU-6050模塊 電機(jī)驅(qū)動 : 小車專用驅(qū)動模塊 Wifi模塊可見光
2015-05-11 07:04:16
申請理由:資深電子愛好者,設(shè)計過循跡、蔽障、WIFI視頻小車,參加過robocup機(jī)器人大賽,一直想做一輛兩輪平衡車,現(xiàn)在用飛思卡爾的MC9SXS128MAL設(shè)計出一款平衡車,想借此機(jī)會申請一塊
2015-11-24 09:32:05
申請理由:申請F(tuán)ireBLE做兩輪平衡車實(shí)驗。項目描述:開發(fā)項目:兩輪平衡車開發(fā)方案:FireBLE集成了Cortex-M0,MPU6050,藍(lán)牙4.0,剛好做平衡車可以省去三大部
2015-07-19 15:28:44
實(shí)驗室正在做“自平衡”類的項目,我們正在學(xué)習(xí)中,。這塊開發(fā)板又恰好集成了MPU6050,希望貴公司能資助我們完成自身對知識的渴求。項目描述:初步方案:1、實(shí)現(xiàn)對兩輪平衡車控制2、控制電機(jī)與電機(jī)驅(qū)動;3
2015-07-30 09:33:17
經(jīng)過一段時間的努力,自平衡小可以站起來了,但是這站立比較曲折,先是用FireBLE自身來處理姿態(tài)數(shù)據(jù),然后控制TB6612FNG驅(qū)動電現(xiàn),但是沒有成功,后來轉(zhuǎn)用兩個處理器來控制,F(xiàn)ireBLE只用
2015-09-22 09:29:13
本帖最后由 將軍問鼎 于 2016-8-20 23:06 編輯
收到板子有一段時間了,近幾日一直在研究兩輪平衡車,廢話少說,先展示我的一張產(chǎn)品圖,接著我在給大家細(xì)細(xì)介紹:先看一下結(jié)構(gòu)下部是兩
2016-08-20 18:34:27
申請理由:我是廣西機(jī)電職業(yè)技術(shù)學(xué)院應(yīng)用電子專業(yè)學(xué)生,現(xiàn)在也在做嵌入式的開發(fā)和學(xué)習(xí),想利用業(yè)余時間設(shè)計智能平衡兩輪小車,同時加深學(xué)習(xí)嵌入式的開發(fā)技術(shù)。項目描述:我們團(tuán)隊打算設(shè)計的智能小車預(yù)想的功能主要有:自動平衡及語音提示、、語音控制、循跡、自動避開障礙物、能超聲波測距等功能
2015-07-17 08:56:14
平衡”類的項目,我們正在學(xué)習(xí)中,。這塊開發(fā)板又恰好集成了WiFi控制,希望貴公司能資助我們完成自身對知識的渴求。項目描述:初步方案:1、實(shí)現(xiàn)對兩輪平衡車控制2、控制電機(jī)與電機(jī)驅(qū)動;3、利用MPU6050
2015-08-12 14:43:37
。MWbalanced采用的是芯片LM2940-5.0和ASM1117-3.3。##姿態(tài)傳感器MWbalanced采用的是當(dāng)下很火的的MPU6050陀螺儀加速度計一體芯片,成本不超過15元,對兩輪自平衡小車
2016-02-24 10:31:17
這個是去年做的一個兩輪自平衡循跡小車,小車采用兩片STM32,一塊負(fù)責(zé)圖像處理,另一塊負(fù)責(zé)對電機(jī)的控制。兩塊板子之間使用串口通信傳輸數(shù)據(jù)。做這個車子學(xué)會了很多,最初兩塊板子之間串口通信有問題,程序會跑著跑著就跑飛,很是惱火。之后每次需要串口通信才打開中斷,解決了跑飛的問題。以下是車子的圖片,和源碼。
2015-09-10 08:59:28
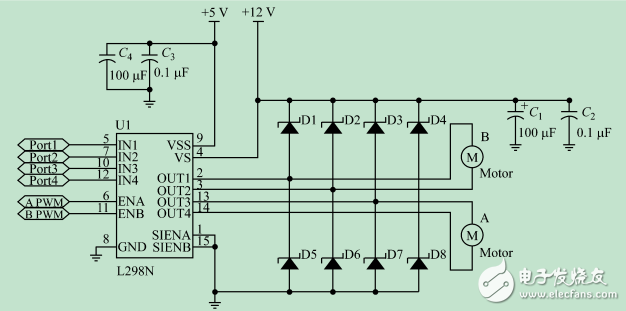
系統(tǒng)基本框架,實(shí)現(xiàn)對車身信息的采集。驅(qū)動直流電機(jī),實(shí)現(xiàn)車體的平衡控制。二、項目設(shè)計 二輪平衡小車采用直流電機(jī)驅(qū)動方式,依靠陀螺儀和角加速度傳感器采集平衡信息
2013-11-16 00:18:41
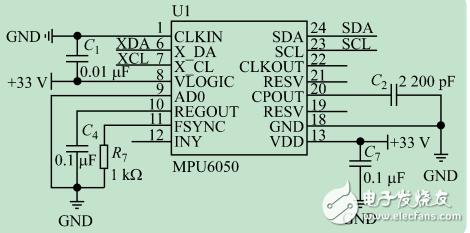
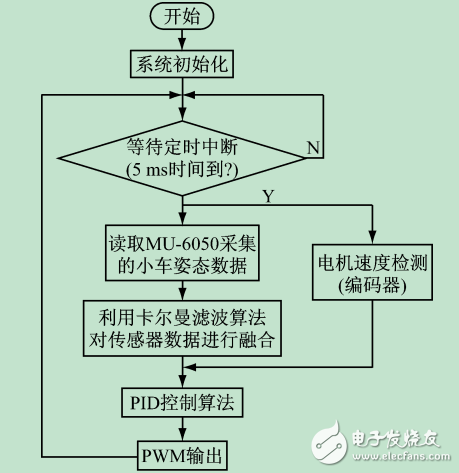
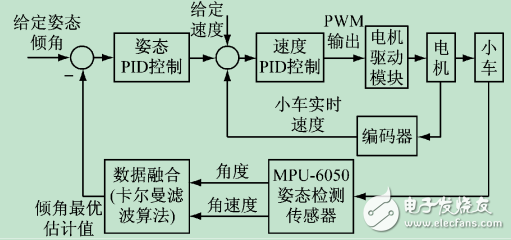
使用MSP制作兩輪自平衡車基本原理:該系統(tǒng)以MSP-EXP432P401R為主控板,采用MPU6050采集小車的姿態(tài)。然后通過卡爾曼濾對數(shù)據(jù)進(jìn)行融合處理,最后利用PID控制算法計算電機(jī)的PWM值以
2015-05-10 07:01:09
現(xiàn)在流行的自平衡兩輪機(jī)器人,有人接觸過嗎,小弟最近想DIY一個玩玩,現(xiàn)在碰到了一個難點(diǎn),至今沒想通,這一類自平衡機(jī)器人都是能夠載物的,不同的物體放在托盤上面,會影響機(jī)器人的重心偏移,應(yīng)該采用什么算法
2016-11-24 11:20:07
` 本帖最后由 幻影刀俠 于 2016-4-5 17:01 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之1.物料工具軟件準(zhǔn)備看著發(fā)燒友眾籌上平衡小車四軸等等這么紅紅火火,我也自己high一下吧
2016-03-15 09:56:10
` 本帖最后由 幻影刀俠 于 2016-4-5 17:00 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之2.底盤電池模塊的組裝改裝準(zhǔn)備好所有的物料之后呢,今天對電池、底盤還有其他模塊進(jìn)行一下
2016-03-16 13:11:20
` 本帖最后由 幻影刀俠 于 2016-4-5 17:02 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之3.原理圖和模擬走線繼續(xù)走起,配置一下管腳,畫一下原理圖,然后模擬一下走線,擺擺放放,免
2016-03-18 14:45:00
` 本帖最后由 幻影刀俠 于 2016-4-5 17:03 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之4.控制板焊接開始焊接,本期沒多少說的。按照上一期的走線,一點(diǎn)點(diǎn)焊接就好了。用雙層板吧
2016-03-19 18:13:54
` 本帖最后由 幻影刀俠 于 2016-4-5 17:05 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之5.APP軟件Bluetooth RC Controller解析本期介紹一款安卓手機(jī)藍(lán)牙
2016-03-21 21:29:28
` 本帖最后由 幻影刀俠 于 2016-4-1 07:45 編輯
刀俠DIY洞洞板stm32兩輪平衡小車之6.走你APP分析本期介紹一款蘋果手機(jī)藍(lán)牙APP軟件“走你”。DFRobot推出的。這個
2016-04-01 07:47:15
``主題:零基礎(chǔ)制作兩輪自平衡小車主講人:宋一標(biāo):喵嗚實(shí)驗室創(chuàng)建者,五邑大學(xué)信息工程學(xué)院本科畢業(yè),曾獲第七屆全國大學(xué)生“飛思卡爾”杯智能汽車競賽華南區(qū)三等獎,曾工作于CVTE,追求極致,熱愛技術(shù)
2016-02-24 11:57:06
喵嗚實(shí)驗室【兩輪自平衡小車】開源項目官網(wǎng):miaowlabs.com快!扶我起來看超清無碼的角度環(huán)PD調(diào)試指南來!再扶我起來看超清無碼的速度環(huán)PI調(diào)試指南
2016-04-12 10:45:36
` 本帖最后由 youzizhile 于 2015-9-17 23:28 編輯
今天上午看到兩輪自平衡車的開發(fā)套件活動,很興奮,一直想做這樣的東西。之前在電子市場買了開發(fā)四軸的電機(jī)和扇葉,還有
2015-04-29 15:46:49
本帖最后由 Stark揚(yáng) 于 2018-10-19 16:26 編輯
基于STM32打造的兩輪直立自平衡小車帶硬件和軟件資料畢設(shè)的資料——STM32兩輪自平衡小車系統(tǒng),完整資料分享出來,給需要
2018-10-18 18:03:10
預(yù)告:代碼及文檔下載方案分析1、基于STM32F103C8T6 單片機(jī)的雙輪自平衡小車系統(tǒng);2、以 MPU6050 三軸陀螺儀加速計為傳感器的姿態(tài)感知系統(tǒng);3、通過卡爾曼濾波對傳感器的數(shù)據(jù)進(jìn)行濾波
2021-11-30 08:03:37
STM32F1穩(wěn)點(diǎn)可用速通版全國大學(xué)生電子設(shè)計競賽 :stm32cubemx+HAL+ mpu6050+DMP+硬件iic+平衡小車之家?guī)霤UBEMX工程的設(shè)置需要的文件報錯分析全國大學(xué)生電子設(shè)計
2022-02-10 06:07:10
基于stm32的兩輪自平衡小車,主控芯片用的是100腳的STM32F103VET6,陀螺儀用的是MPU6050,電機(jī)驅(qū)動用的是TB6612,藍(lán)牙是匯承的HC05郵票孔封裝的,WIFI用的是濟(jì)南有人科技的USR-WIFI232-S,小車底盤用的是平衡小車之家的某一款帶編碼器的(不是我買的,同學(xué)的),電池用...
2021-07-27 06:17:26
最近辭職在家,想學(xué)點(diǎn)東西,看了視頻教程,覺得枯燥無聊,想著是嵌入式方向的,怎么也要會一些項目吧,便準(zhǔn)備開始著手做一些項目,就先從stm32的兩輪自平衡小車開始入手吧。以下物料都是自己采購的。主控板
2021-08-09 06:48:42
大四期間一邊做畢業(yè)設(shè)計,一邊和老師一起設(shè)計兩輪平衡車控制系統(tǒng)。傳感器采用的還是熟悉的mpu6050,控制芯片采用的是stm32f103c8t6,程序方面也是采用了卡爾曼濾波和PID控制算法。經(jīng)過
2016-07-23 23:32:50
智能車種類眾多,其中兩輪平衡車特別受到了工程師的喜愛,整理了8個兩輪平衡車的資料,一起看看這個小可愛吧。1、基于ARM-STM32的兩輪自平衡小車小車直立和方向控制任務(wù)都是直接通過控制小車兩個電機(jī)
2021-11-30 08:15:36
以ADSP為系統(tǒng)核心實(shí)現(xiàn)的兩輪自平衡動作模仿小車,主要由自平衡模塊與控制模塊構(gòu)成。自平衡模塊采用卡爾曼濾波算法對傳感器測得的角度值和角速度值進(jìn)行數(shù)據(jù)融合后求出精確的角度值,再利用PID控制實(shí)現(xiàn)倒立
2014-11-03 17:12:35
今天開貼貼,制作基于MSP430的兩輪平衡車。希望各路大神多多指教,提出問題!大家一起學(xué)習(xí),提高。(預(yù)計是三個月內(nèi),完成前每一周至少一個技術(shù)貼),陸續(xù)會把開發(fā)過程,軟硬件開源,并附上各階段開發(fā)圖片,
2015-05-08 16:31:12
的站立式為坐式兩輪自平衡車,使得做起來更加的舒適,更加易于控制。通過使用陀螺、加速度計來測姿、測速等,采用模糊控制來控制小車,實(shí)現(xiàn)小車的平衡。 技術(shù)關(guān)鍵:①測量小車的姿態(tài)、速度等。②使用處理芯片對姿態(tài)
2013-11-01 13:51:26
怎樣去控制舵機(jī)?轉(zhuǎn)動角度與占空比有何關(guān)系?如何實(shí)現(xiàn)一種基于三軸云臺與MPU-6050的平衡系統(tǒng)?
2021-09-29 07:51:49
如何利用STM32去實(shí)現(xiàn)一種兩輪自平衡車呢?
2021-12-20 07:44:28
如何去制作一種基于stm32的兩輪平衡小車?基于stm32的兩輪平衡小車電路設(shè)計的基本過程是怎樣的?
2021-07-09 07:47:07
寒假無所事事,決定做一個兩輪平衡車來玩玩.個人覺得兩輪自平衡車是集合所有算法的精髓.它就像蛋炒飯,最簡單也是最困難.他可以用簡單的算法實(shí)現(xiàn),當(dāng)然也可以用最復(fù)雜的控制理論來實(shí)現(xiàn). 本質(zhì)上來說它就是個
2021-07-13 07:24:30
現(xiàn)在有GY521模塊,有只能小車的基礎(chǔ)配件,現(xiàn)在想做兩輪平衡小車,但是對于GY521模塊輸出的數(shù)據(jù),濾波算法都不太懂,還有調(diào)節(jié)的方法只知道大概,網(wǎng)上的資料都是大體說說,希望大神分享一些做平衡小車細(xì)致點(diǎn)的資料,問一下GY521輸出的信號是什么,有這個模塊還用不用卡爾曼濾波
2019-01-11 10:37:58
怎么實(shí)現(xiàn)基于STM32兩輪自平衡小車的設(shè)計?
2021-10-11 09:37:12
怎么實(shí)現(xiàn)基于STM32的二輪自平衡小車的制作?
2021-11-15 07:55:50
兩輪平衡小車是由哪些模塊組成的?怎樣去設(shè)計一種基于stm32的兩輪平衡小車?
2021-09-28 06:26:18
基于stm32的兩輪自平衡小車是由哪些模塊組成的?怎樣去設(shè)計一種基于stm32的兩輪自平衡小車呢?
2022-03-01 06:31:44
怎樣去設(shè)計一種基于AVR單片機(jī)的兩輪自平衡智能車?如何對其進(jìn)行測速?
2021-09-24 07:12:25
畢設(shè)分享:STM32兩輪自平衡小車系統(tǒng)設(shè)計與控制 含源碼、原理圖及PCB文件
2021-07-27 07:20:05
此篇為硬件篇,接上一篇“基于stm32的兩輪自平衡小車2(原理篇)”。包含自行設(shè)計電路板原理圖與PCB電路圖的過程。詳見目錄。目錄stm32管腳分配硬件原理圖PCB電路圖最后效果圖stm32管腳分配
2021-08-11 07:20:11
怎樣通過手機(jī)藍(lán)牙APP去控制兩輪自平衡車呢?怎樣去設(shè)計一種兩輪自平衡車的軟硬件呢?
2021-11-11 06:21:03
我的兩輪平衡小車之路(基于STM32的腦洞大開設(shè)計)https://bbs.elecfans.com/jishu_481497_1_1.html@wqqq 基于MSP430的兩輪自平衡小車的設(shè)計和制作
2015-04-28 23:40:49
。整個過程的開發(fā)資料會全部開源,同時在過程中會同步更新部分干貨,不喜求輕噴。實(shí)現(xiàn)基本功能(兩輪小車自平衡)外,還附帶一些“浮夸”點(diǎn)的技能,喜歡的朋友可以后續(xù)關(guān)注一下。最后PS一下,所有開源資源僅限學(xué)習(xí)交流,禁止進(jìn)行商用,本人保留所有追究權(quán)利。
2015-05-09 10:33:01
MPU6050傳感器展開。分為數(shù)據(jù)獲取,濾波,數(shù)據(jù)處理1.1數(shù)據(jù)獲取STM32通過I2C和MPU6050進(jìn)行通訊,其中涉及到基礎(chǔ)的I2C通信協(xié)議實(shí)現(xiàn),在I2C基礎(chǔ)上,涉及到MPU6050各種參數(shù)的設(shè)置
2016-12-11 01:02:50
畢設(shè)的資料一STM32兩輪自 平衡小車系統(tǒng),完整資料分享出來,給需要的人。硬件資源:主控芯片用的是100腳的STM32F103VET6,陀螺儀用的是MPU6050,電機(jī)驅(qū)動用的是TB6612,藍(lán)牙
2019-03-19 14:43:28
求兩輪自平衡小車的資料,最好是與元件清單和電路圖源碼等等,自己想做一個玩玩,最好是51或者avr的也不要太貴了,個人是學(xué)生,可能承受不起,主要是學(xué)習(xí)用的,有這方面資料的大神,發(fā)一下給我,或者留下聯(lián)系方式,我的郵箱是1083552109@qq.com。有大神能夠指導(dǎo)我那就更好了
2013-12-24 17:35:00
求兩輪自平衡小車資料,本人做畢業(yè)設(shè)計。謝謝了。
2013-12-31 21:27:17
求兩輪自平衡小車資料 畢業(yè)設(shè)計用。謝謝。
2014-01-01 12:27:12
最近想弄個自平衡小車試試,便在網(wǎng)上買了個ADX345加速度計和L3G4200三軸陀螺儀傳感器模塊,根據(jù)數(shù)據(jù)手冊可以輸出他們的X、Y、Z的值,但接下來該怎么做,網(wǎng)上看了很多,但沒頭緒,跪求大神指導(dǎo)指導(dǎo)。
2013-11-15 15:59:58
)開發(fā)板。本樣例效果動圖:硬件配置資源兩輪平衡小車主要硬件資源:主控CPU:小熊派BearPi-HM Nano(Hi3861)開發(fā)板;陀螺儀:MPU6050六軸陀螺儀傳感器;左右輪:帶有霍爾傳感器
2022-12-16 12:03:36
`主題:零基礎(chǔ)制作兩輪自平衡小車主講內(nèi)容:器件選型;原理圖講解;自平衡原理;濾波算法講解;調(diào)試經(jīng)驗分享;課件資料:(回復(fù)可見)[hide][/hide]`
2016-04-28 11:33:36
參照飛思卡爾智能車的方案,diy了一臺兩輪自平衡小車,小車上電后能停在一點(diǎn)不動,收到干擾可以自動平衡。另外我發(fā)現(xiàn),配合速度環(huán),即使重心不在小車中心,小車也能自己調(diào)整角度,達(dá)到重心平衡使用的材料
2014-04-19 12:39:37
研究兩輪自平衡電動車有什么意義?怎樣去設(shè)計兩輪自平衡自動車系統(tǒng)?設(shè)計兩輪自平衡自動車有哪些步驟程序?兩輪自平衡電動車有什么優(yōu)點(diǎn)?
2021-04-19 11:13:11
大神們,求一份兩輪平衡小車資料啊。主控芯片是STM32F103C8T6的。拜托大家了
2019-02-24 22:57:58
最近想做個兩輪自平衡小車,有大神做過的嗎?能給點(diǎn)建議唄比如電機(jī)的選取需要的模塊需要提前了解的知識,原理等等不勝感激
2018-09-21 09:29:15
給大家分享個兩輪平衡小車設(shè)計,不多說了,直接上圖 附件資料
2016-06-07 16:32:18
共享前段時間做自平衡小車時MPU6050的資料適用于自平衡小車,四軸飛行器。
2015-10-28 17:10:29 25
25 兩輪自平衡小車的設(shè)計與實(shí)現(xiàn),基于STM32控制的自平衡雙輪小車,其中機(jī)械部分包括車體、車輪、步進(jìn)電機(jī)、鋰電池等部件設(shè)計加工。
2016-05-19 15:16:1520 arduino MPU-6050庫文件Arduino+MPU6050+卡爾曼濾波自平衡車
2016-05-23 18:21:1651 基于STM32的兩輪平衡小車源代碼說明。
2021-03-17 14:21:0762 畢設(shè)分享:STM32兩輪自平衡小車系統(tǒng)設(shè)計與控制 含源碼、原理圖及PCB文件
2021-11-23 18:07:0488 STM32 MPU6050 平衡車
2021-12-06 14:51:1061 基于STM32兩輪自平衡小車系統(tǒng)設(shè)計與控制 含源碼、原理圖及PCB文件.主控芯片用的是100腳的STM32F103VET6,陀螺儀用的是MPU6050,電機(jī)驅(qū)動用的是TB6612,藍(lán)牙是匯承的HC05郵票孔封裝的,WIFI用的是濟(jì)南有人科技的USR-WIFI232-S
2022-04-30 23:20:01 7708
7708 
兩輪自平衡電動車以其靈活、便捷、節(jié)能等特點(diǎn),得到了很大的發(fā)展,今天向大家介紹一款平衡車控制板方案。 一、硬件方案硬件組成:本方案采用STM32F103核心控制板
2024-01-11 14:12:28
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論