 電子發(fā)燒友App
電子發(fā)燒友App


串行通信在波特率誤差超過一定范圍時(shí),會產(chǎn)生錯(cuò)誤。本節(jié)介紹的內(nèi)容在51單片機(jī)上僅用軟件就實(shí)現(xiàn)了波特率自動整定,最大程度地減小了波特率誤差,因而可使串行通信的可靠性得到提高。
51單片機(jī)具有一個(gè)全雙工的串行接口,提供了多機(jī)通信功能,可方便地構(gòu)成多機(jī)系統(tǒng)(多機(jī)容錯(cuò)系統(tǒng)、集散型多級系統(tǒng)),為完成大型的控制任務(wù)提供了有效的手段。用51單片機(jī)組成的多機(jī)控制系統(tǒng),國內(nèi)已出現(xiàn)多例。在這樣的系統(tǒng)中,可靠地實(shí)現(xiàn)多處理器間的信息交換(串行通信)是十分重要的。本節(jié)的研究發(fā)現(xiàn),波特率作為串行通信的速率,同時(shí)對通信的可靠性有重要影響。
一、正常串行通信的實(shí)現(xiàn)條件
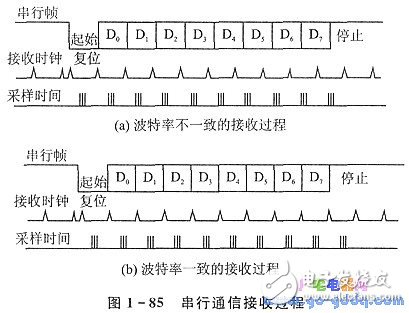
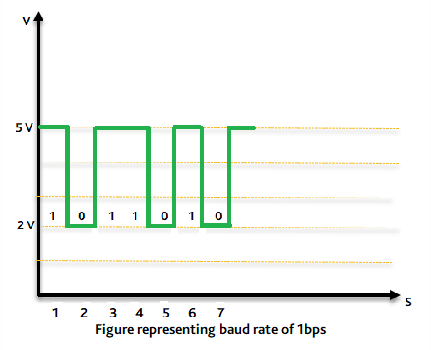
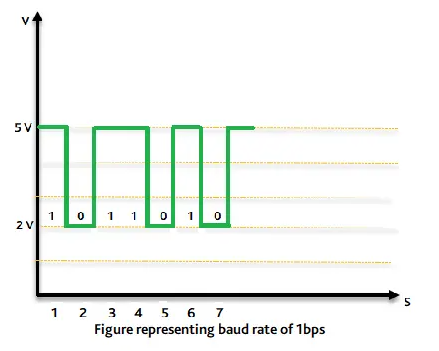
串行通信是按位傳送數(shù)據(jù)的。每個(gè)數(shù)據(jù)有8或9個(gè)數(shù)據(jù)位,加上起始位和停止位構(gòu)成一個(gè)串行幀。每一位占用時(shí)間T,1/T稱為串行通信的波特率。理想情況下,發(fā)送機(jī)和接收機(jī)設(shè)置的波特率一致。接收機(jī)的接收控制器在串行幀每一數(shù)據(jù)位的中點(diǎn)進(jìn)行采樣,能接收到正確的數(shù)據(jù),但要求波特率完全一致是不可能的。這就提出了一個(gè)問題:要可靠地實(shí)現(xiàn)串行通信,允許收發(fā)雙方的波特率有多大誤差?我們以一個(gè)10位的串行幀為例進(jìn)行分析。
圖1 - 85 (b)是正常工作的情形,波特率一致。在圖1 - 85(a)中,接收波特率不變,而發(fā)送波特率變小,每位的時(shí)間T延長5%,在第10位采樣時(shí),就產(chǎn)生了錯(cuò)位,不能進(jìn)行正常通信。對于10位的串行幀,允許的最大波特率誤差不超過5%;在多機(jī)通信方式下,串行幀是11位的,允許的最大波特率誤差不超過4. 5%。
上面得到的僅僅是理想情況下的波特率誤差允許上限。實(shí)際應(yīng)用中,由于硬件設(shè)備的頻帶有限,數(shù)據(jù)位的上下跳沿要占用一定時(shí)間,每個(gè)數(shù)據(jù)位的有效時(shí)間比理想情況要短,所以對波特率誤差會有更嚴(yán)格的要求。
二、波特率誤差來源及克服辦法
1.51單片機(jī)串行通信波特率的產(chǎn)生
51單片機(jī)的串行口有4種操作模式,由串行口控制字SCON中的兩位SMO和SM1設(shè)置。模式0作同步移位寄存器,與通信無關(guān);模式2的波特率直接由機(jī)器主頻fosc決定,不方便應(yīng)用;常用的是模式1和模式3.分別是8位和9位異步通信口。其波特率是可變的,由機(jī)內(nèi)的定時(shí)/計(jì)數(shù)器1(C/T1)來產(chǎn)生,波特率有以下公式:
C/T1有3種工作模式:模式0為13位定時(shí)/計(jì)數(shù)器,模式1為16位定時(shí)/計(jì)數(shù)器,而模式2是可自動重裝時(shí)間常數(shù)的8位定時(shí)/計(jì)數(shù)器。當(dāng)需要的波特率不是太低時(shí),一般用模式2作波特率發(fā)生器:一方面省去了用C/Ti中斷服務(wù)重裝時(shí)間常數(shù)的工作,更主要的是避免了因中斷響應(yīng)時(shí)間不同引起的波特率隨機(jī)誤差。對C/T,的模式2,波特率按如下公式計(jì)算:
式中:fosc為晶振頻率;TH1為時(shí)間常數(shù)。
若采用6 MHz的晶振,用模式2可產(chǎn)生的最低波特率為61。對于實(shí)時(shí)控制系統(tǒng),絕不會采用更低的信息傳遞速率(每秒6個(gè)數(shù)據(jù))。所以,以下討論只限于C/Ti的模式2作波特率發(fā)生器的情況。
2.波特率誤差的來源
由式(1 -4)可知,fbit與fosc及TH1有關(guān)。首先考慮fosc對.fbit的影響。51的振蕩器電路是 由晶體及電容C1、C2構(gòu)成的。XTAL1及XTAL2為外接晶體管引腳。fosc主要由晶體的固有頻率決定,同時(shí)也與電容C1、C2及外界溫度有一定關(guān)系。另外,晶體頻率的標(biāo)稱值與實(shí)際值也不可能完全一致。我們曾測定過一組標(biāo)稱4 MHz的晶體,發(fā)現(xiàn)離散度達(dá)2%。由式(1-4)得:
這說明用有誤差的fosc去計(jì)算fbit時(shí),fbit,會產(chǎn)生同樣大小的相對誤差。
下面考慮TH,的影響。時(shí)間常數(shù)只有8位字長,這樣就必然存在量化誤差。采用四舍五入后,THi的量化誤差|△TH1| mAX=0.5。綜合式(1-4)、(1-5)得:
由式(1 -6)可以看出,由量化誤差產(chǎn)生的波特率誤差與波特率成正比,與fosc成反比;并且若置SMOD-l,則可使誤差減小一半。
3.減小波特率誤差的措施
人工設(shè)置波特率,不可避免要用到fosc的標(biāo)稱值,這樣就引入了一個(gè)誤差源。采用自動整定,可以消除由fosc標(biāo)稱值不準(zhǔn)確引入的誤差。
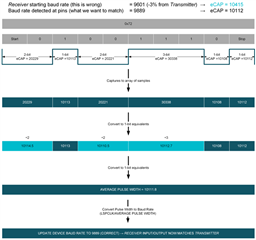
波特率自動整定可按如下的方法進(jìn)行:在一個(gè)多機(jī)系統(tǒng)中,由系統(tǒng)主機(jī)產(chǎn)生出一個(gè)預(yù)定波特率的方波信號,從串行口發(fā)送到各從機(jī);各從機(jī)以各自的時(shí)鐘為基準(zhǔn)測定此方波的周期所包含的機(jī)器周期數(shù)N,從N可以方便地?fù)Q算出產(chǎn)生同樣波特率需要的時(shí)間常數(shù)TH1。計(jì)算公式推導(dǎo)如下:
51單片機(jī)一個(gè)機(jī)器周期的時(shí)間為δT=12/fosc,一個(gè)方波周期包含兩個(gè)串行數(shù)據(jù)位,這樣,每位數(shù)據(jù)占用的時(shí)間為
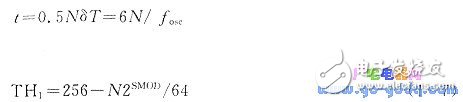
而fbit=1/T,代入式(1-4)得
TH1的量化誤差總是存在的,為減小其影響,應(yīng)盡量選SMOD=1;在用式(1-7)進(jìn)行計(jì)算時(shí),要進(jìn)行舍入,而不是截尾。
采用自動整定時(shí),波特率誤差僅由TH,的量化誤差引起:
采用12 MHz晶體,fbit=4 800時(shí)可能的最大波特率誤差為3.84% (SMOD=1).可以保證正常通信。一般系統(tǒng)1 200的波特率就足以滿足要求了。
三、波特率自動整定的實(shí)現(xiàn)和結(jié)論
1.自動整定的實(shí)現(xiàn)
51單片機(jī)的P3口是復(fù)用的,其中的P3.0(串行口接收線)和P3.1(發(fā)送線)可以用作一般輸入/輸出口線,也可作為串行口使用。利用這個(gè)特點(diǎn),可以在不對串行口接線作任何變動的情況下,僅利用軟件實(shí)現(xiàn)波特率的自動整定。
首先要完成的是方波周期的測量。為保證測量精度,共測8個(gè)方波周期的機(jī)器周期數(shù),然后除以8(移位即可)得N。采用C/T1的模式1(16位定時(shí)器)計(jì)時(shí),程序流程圖如圖1- 86所示。
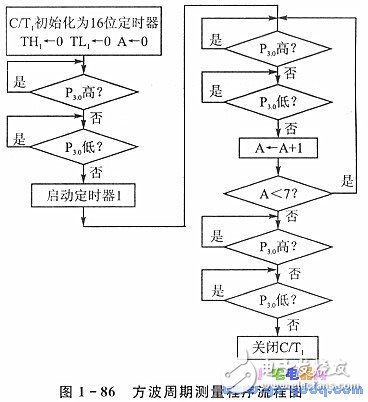
最后得到的16 位計(jì)數(shù)值存放在TH1、TL1中,其值為8N。取SMOD=1,式(1-7)成為
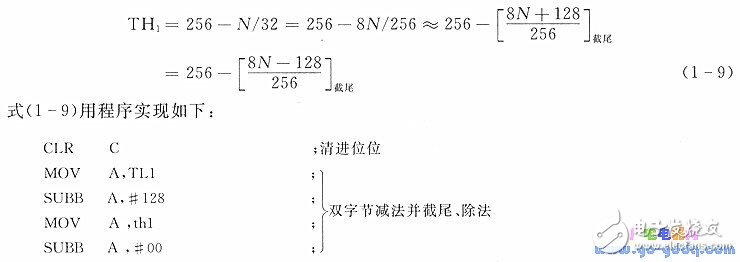

至此,時(shí)間常數(shù)TH1計(jì)算完畢,接下來可進(jìn)行常規(guī)的串行口初始化。若有必要,還可進(jìn)行波特率誤差校驗(yàn)。編程是很容易的,這里省略。
2.結(jié) 論
①串行通信中的波特率誤差超過一定范圍會影響通信的可靠性,在高波特率下更加嚴(yán)重。
②本例給出的波特率自動整定方法對硬件不作任何變動,僅用軟件即可方便實(shí)現(xiàn)。在12 MHz晶振下實(shí)現(xiàn)了4 800 b/s的高速通信,避免了人工試湊波特率的困難。
③當(dāng)串行口作為通用儀表對系統(tǒng)機(jī)的數(shù)據(jù)接口時(shí),此方法尤有意義。本節(jié)的成果已用于一個(gè)通用轉(zhuǎn)速表對IBM - PC的串行接口中。
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論