 電子發(fā)燒友App
電子發(fā)燒友App


雖然PID不是什么牛逼的東西,但是真心希望以后剛剛接觸這塊的人能盡快進入狀態(tài)。特地分享一些自己如何實現(xiàn)的過程。
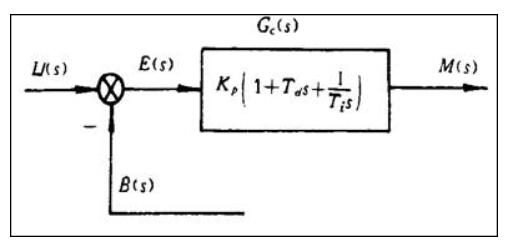
首先說說增量式PID的公式,這個關(guān)系到MCU算法公式的書寫,實際上兩個公式的寫法是同一個公式變換來得,不同的是系數(shù)的差異。
資料上比較多的是:
?

?
還有一種的算法是:
?

?
這里主要介紹第二種,具體會分析比例、積分、微分三個環(huán)節(jié)的作用。
硬件部分:
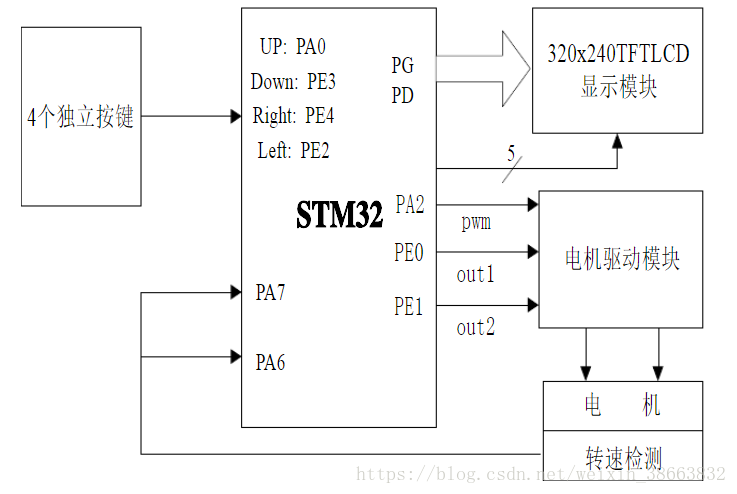
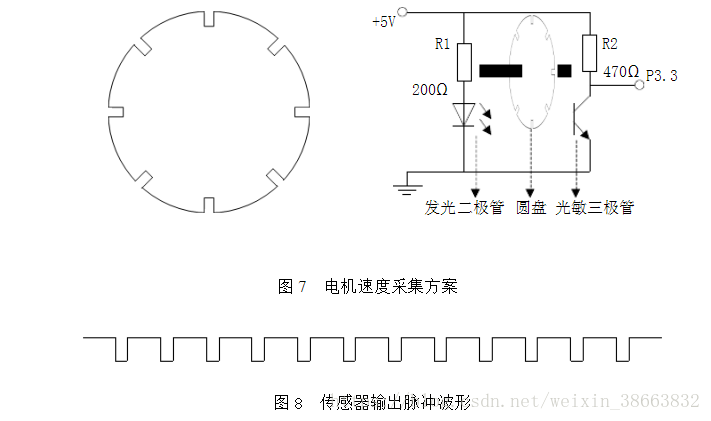
控制系統(tǒng)的控制對象是4個空心杯直流電機,電機帶光電編碼器,可以反饋轉(zhuǎn)速大小的波形。電機驅(qū)動模塊是普通的L298N模塊。
芯片型號,STM32F103ZET6
?
軟件部分:
PWM輸出:TIM3,可以直接輸出4路不通占空比的PWM波
PWM捕獲:STM32除了TIM6 TIM7其余的都有捕獲功能,使用TIM1 TIM2 TIM4 TIM5四個定時器捕獲四個反饋信號
PID的采樣和處理:使用了基本定時器TIM6,溢出時間就是我的采樣周期,理論上T越小效果會越好,這里我取20ms,依據(jù)控制對象吧,如果控制水溫什么的采樣周期會是幾秒幾分鐘什么的。
上面的PWM輸出和捕獲關(guān)于定時器的設(shè)置都有例程,我這里是這樣的:
TIM3輸出四路PWM,在引腳 C 的 GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9輸出
四路捕獲分別是TIM4??TIM1??TIM2??TIM5? ?,對應(yīng)引腳是:??PB7 PE11 PB3 PA1
高級定時器tim1的初始化略不同,它的中斷”名稱“和通用定時器不同。具體的內(nèi)容,請大家看一下我分享的代碼就明白了。
?

?程序.zip?
主要講解PID部分
準備部分:先定義PID結(jié)構(gòu)體:
typedef struct
{
int setpoint;//設(shè)定目標(biāo)
int sum_error;//誤差累計
float proportion ;//比例常數(shù)
float integral ;//積分常數(shù)
float derivative;//微分常數(shù)
int last_error;//e[-1]
int prev_error;//e[-2]
}PIDtypedef;
復(fù)制代碼
在文件中定義幾個關(guān)鍵變量:
float??Kp =? ??0.32??; //比例常數(shù)
float??Ti =? ? ? ? ? 0.09 ; //積分時間常數(shù)
float Td =? ? ? ? ? 0.0028 ;??//微分時間常數(shù)
#define T? ? ? ? ? ? 0.02 //采樣周期
#define Ki? ??Kp*(T/Ti)? ? ??// Kp Ki Kd 三個主要參數(shù)
#define Kd? ? ? ? ? Kp*(Td/T)
復(fù)制代碼
PID.H里面主要的幾個函數(shù):
void PIDperiodinit(u16 arr,u16 psc);? ? ??//PID 采樣定時器設(shè)定
void incPIDinit(void);? ? ? ? ? //初始化,參數(shù)清零清零
int incPIDcalc(PIDtypedef*PIDx,u16 nextpoint);? ? ? ??//PID計算
void PID_setpoint(PIDtypedef*PIDx,u16 setvalue);??//設(shè)定 PID預(yù)期值
void PID_set(float pp,float ii,float dd);//設(shè)定PID??kp ki kd三個參數(shù)
void set_speed(float W1,float W2,float W3,float W4);//設(shè)定四個電機的目標(biāo)轉(zhuǎn)速
復(fù)制代碼
PID處理過程:
岔開一下:這里我控制的是電機的轉(zhuǎn)速w,實際上電機的反饋波形的頻率f、電機轉(zhuǎn)速w、控制信號PWM的占空比a三者是大致線性的正比的關(guān)系,這里強調(diào)這個的目的是
因為樓主在前期一直搞不懂我控制的轉(zhuǎn)速怎么和TIM4輸出的PWM的占空比聯(lián)系起來,后來想清楚里面的聯(lián)系之后通過公式把各個系數(shù)算出來了。
正題:控制流程是這樣的,首先我設(shè)定我需要的車速(對應(yīng)四個輪子的轉(zhuǎn)速),然后PID就是開始響應(yīng)了,它先采樣電機轉(zhuǎn)速,得到偏差值E,帶入PID計算公式,得到調(diào)整量也就是最終更改了PWM的占空比,不斷調(diào)節(jié),直到轉(zhuǎn)速在穩(wěn)態(tài)的一個小范圍上下浮動。
上面講到的“得到調(diào)整量”就是增量PID的公式:
int incPIDcalc(PIDtypedef *PIDx,u16 nextpoint)
{
int iError,iincpid;
iError=PIDx->setpoint-nextpoint;??//當(dāng)前誤差
/*iincpid=? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??//增量計算
PIDx->proportion*iError? ? ? ? ? //e[k]項
-PIDx->integral*PIDx->last_error? ? ? //e[k-1]
+PIDx->derivative*PIDx->prev_error;//e[k-2]
*/
iincpid=? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? //增量計算
PIDx->proportion*(iError-PIDx->last_error)
+PIDx->integral*iError
+PIDx->derivative*(iError-2*PIDx->last_error+PIDx->prev_error);
PIDx->prev_error=PIDx->last_error; //存儲誤差,便于下次計算
PIDx->last_error=iError;
return(iincpid) ;
}
復(fù)制代碼
注釋掉的是第一種寫法,沒注釋的是第二種以Kp KI kd為系數(shù)的寫法,實際結(jié)果是一樣的。
處理過程放在了TIM6,溢出周期時間就是是PID里面采樣周期(區(qū)分于反饋信號的采樣,反饋信號采樣是1M的頻率)
相關(guān)代碼:
void TIM6_IRQHandler(void)? ? ??//? ? ??采樣時間到,中斷處理函數(shù)
{? ? ?
? ?
if (TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET)//更新中斷
? ??{
? ??frequency1=1000000/period_TIM4? ? ??; //通過捕獲的波形的周期算出頻率
? ??frequency2=1000000/period_TIM1? ? ??;
? ??frequency3=1000000/period_TIM2? ? ??;
? ??frequency4=1000000/period_TIM5? ? ??;
/********PID1處理**********/
? ??PID1.sum_error+=(incPIDcalc(&PID1,frequency1));? ? ? //計算增量并累加
? pwm1=PID1.sum_error*4.6875??;? //pwm1 代表將要輸出PWM的占空比
? ? frequency1=0; //清零
??period_TIM4=0;
/********PID2處理**********/
? ? PID2.sum_error+=(incPIDcalc(&PID2,frequency2));? ? ? //計算增量并累加??Y=Y+Y'? ? ? ? ?
? ? pwm2=PID2.sum_error*4.6875 ;? //將要輸出PWM的占空比
? ??frequency2=0;
? ??period_TIM1=0;
/********PID3處理**********/
? ? PID3.sum_error+=(incPIDcalc(&PID3,frequency3));? ? ? //常規(guī)PID控制
? ??pwm3=PID3.sum_error*4.6875 ;? //將要輸出PWM的占空比
? ??frequency3=0;
? ??period_TIM2=0;
/********PID4處理**********/
? ? ? PID4.sum_error+=(incPIDcalc(&PID4,frequency4));? ? ? //計算增量并累加
? ? pwm4=PID4.sum_error*4.6875 ;? //將要輸出PWM的占空比
? ??frequency4=0;
? ??period_TIM5=0;
? ? }
TIM_SetCompare(pwm1,pwm2,pwm3,pwm4);? ? ? ? //重新設(shè)定PWM值
TIM_ClearITPendingBit(TIM6, TIM_IT_Update); //清除中斷標(biāo)志位? ? ? ? ?
}
復(fù)制代碼
?
TIM_SetCompare ()函數(shù):

?
上面幾個代碼是PID實現(xiàn)的關(guān)鍵部分
還有整定過程:
辦法有不少,這里用的是先KP,再TI,再TD,在微調(diào)。其他的辦法特別是有個尼古拉斯法我發(fā)現(xiàn)不適合我這個控制對象。
先Kp,就是消除積分和微分部分的影響,這里我糾結(jié)過到底是讓Ti 等于一個很大的值讓Ki=Kp*(T/Ti)里面的KI接近零,還是直接定義KI=0,TI=0.
然后發(fā)現(xiàn)前者沒法找到KP使系統(tǒng)震蕩的臨界值,第二個辦法可以得到預(yù)期的效果:即KP大了會產(chǎn)生震蕩,小了會讓系統(tǒng)穩(wěn)定下來,當(dāng)然這個時候是有穩(wěn)態(tài)誤差的。
隨后把積分部分加進去,KI=Kp*(T/Ti)這個公式用起來,并且不斷調(diào)節(jié)TI 。TI太大系統(tǒng)穩(wěn)定時間比較長。
然后加上Kd? ?? ???=Kp*(Td/T),對于系統(tǒng)響應(yīng)比較滯后的情況效果好像好一些,我這里的電機反映挺快的,所以Td值很小。
最后就是幾個參數(shù)調(diào)節(jié)一下,讓波形好看一點。這里的波形實際反映的是采集回來的轉(zhuǎn)速值,用STM32的DAC功能輸出和轉(zhuǎn)速對應(yīng)的電壓,用示波器采集的。
最后的波形是這樣的:
?

?
?
?
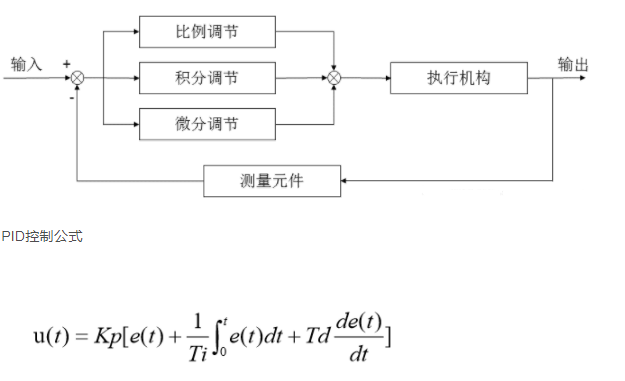
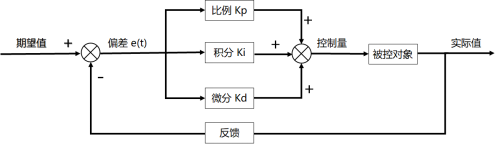
PID控制算法的C語言實現(xiàn)一 PID算法原理
?? 最近兩天在考慮一般控制算法的C語言實現(xiàn)問題,發(fā)現(xiàn)網(wǎng)絡(luò)上尚沒有一套完整的比較體系的講解。于是總結(jié)了幾天,整理一套思路分享給大家。
?? 在工業(yè)應(yīng)用中PID及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無愧的萬能算法,如果能夠熟練掌握PID算法的設(shè)計與實現(xiàn)過程,對于一般的研發(fā)人員來講,應(yīng)該是足夠應(yīng)對一般研發(fā)問題了,而難能可貴的是,在我所接觸的控制算法當(dāng)中,PID控制算法又是最簡單,最能體現(xiàn)反饋思想的控制算法,可謂經(jīng)典中的經(jīng)典。經(jīng)典的未必是復(fù)雜的,經(jīng)典的東西常常是簡單的,而且是最簡單的,想想牛頓的力學(xué)三大定律吧,想想愛因斯坦的質(zhì)能方程吧,何等的簡單!簡單的不是原始的,簡單的也不是落后的,簡單到了美的程度。先看看PID算法的一般形式:
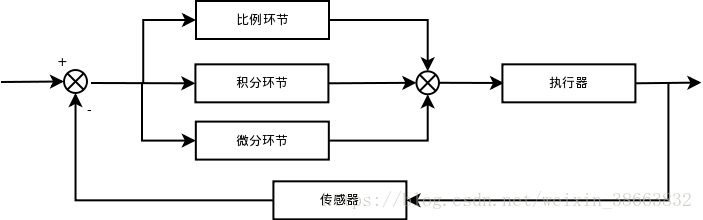
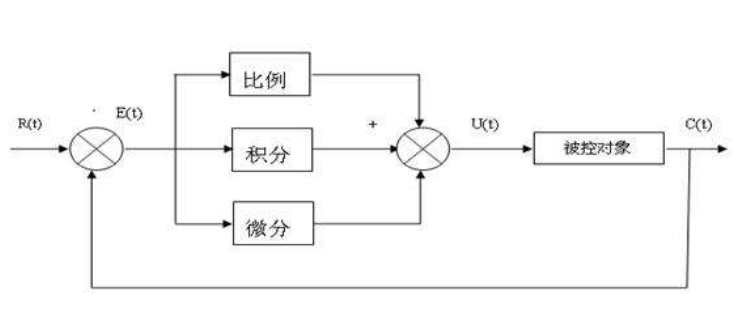
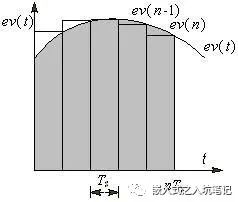
?? PID的流程簡單到了不能再簡單的程度,通過誤差信號控制被控量,而控制器本身就是比例、積分、微分三個環(huán)節(jié)的加和。這里我們規(guī)定(在t時刻):
?? 1.輸入量為rin(t);
?? 2.輸出量為rout(t);
?? 3.偏差量為err(t)=rin(t)-rout(t);
?? pid的控制規(guī)律為

?? 理解一下這個公式,主要從下面幾個問題著手,為了便于理解,把控制環(huán)境具體一下:
?? 1.規(guī)定這個流程是用來為直流電機調(diào)速的;
?? 2.輸入量rin(t)為電機轉(zhuǎn)速預(yù)定值;
?? 3.輸出量rout(t)為電機轉(zhuǎn)速實際值;
?? 4.執(zhí)行器為直流電機;
?? 5.傳感器為光電碼盤,假設(shè)碼盤為10線;
?? 6.直流電機采用PWM調(diào)速 轉(zhuǎn)速用單位 轉(zhuǎn)/min 表示;
? 不難看出以下結(jié)論:
?? 1.輸入量rin(t)為電機轉(zhuǎn)速預(yù)定值(轉(zhuǎn)/min);
?? 2. 輸出量rout(t)為電機轉(zhuǎn)速實際值(轉(zhuǎn)/min);
?? 3.偏差量為預(yù)定值和實際值之差(轉(zhuǎn)/min);
?? 那么以下幾個問題需要弄清楚:
?? 1.通過PID環(huán)節(jié)之后的 U(k) 是什么值呢?
? ?2.通過調(diào)節(jié) PWM 的電壓占空比來調(diào)節(jié)電機的轉(zhuǎn)速。
?? 3.那么U(k)與控制電機的 PWM 之間存在怎樣的聯(lián)系呢?
?
看到有不少人問到底如何讓UK值與PWM占空比值對應(yīng),進而實現(xiàn)占空比輸出和輸出控制電壓對應(yīng)。
(注意,我這里討論的前提是輸出控制的是電壓,不是PWM方波。PWM輸出后要經(jīng)過濾波整形再輸出控制。)
前提條件:
輸出電壓控制電壓范圍是0-10V。
給定、反饋、輸出電壓采樣輸入電壓范圍是0-5V(經(jīng)過運放)。
那么10位AD芯片電壓采集得到的數(shù)據(jù)范圍就是0-1024。
PWM為 8位可調(diào)占空比方波,0對應(yīng)輸出占空比為0的方波,255對應(yīng)輸出占空比100%的方波,127對應(yīng)輸出50%的方波。
比如當(dāng)前給定是2.5V,反饋電壓是1V。(KP,KI,KD等系數(shù)略,關(guān)于PID算法的整數(shù)實現(xiàn)我在前文中有論述如何實現(xiàn))。
那么經(jīng)過AD采樣
1、給定2.5V對應(yīng)為 512
2、反饋1V對應(yīng)為 205
假定經(jīng)過PID計算得到的UK為400
也就意味著輸出電壓應(yīng)當(dāng)為(400*(UPWM峰值電壓))/1024
那么UK對應(yīng)的PWM占空比是多少呢?
我們知道,UK=1024對應(yīng)占空比為100,也就是PWM的占空比系數(shù)為255。可知,PWM系數(shù) = UK/4;
那么400就應(yīng)當(dāng)對應(yīng)系數(shù) 400/4=100。
也就是輸出電壓=400*10/1024=3.9V
同時,由于采樣精度以及PWM輸出占空比精度控制的問題,將導(dǎo)致輸出電壓和期望值不是那么線性,所以,我在項目內(nèi)加入了輸出電壓采樣的控制。
采樣AD輸入為0-5V,所以,對于輸出0-10V有一個縮小的比例。
輸出10V則采樣值對應(yīng)為255
輸出5V則采樣之對應(yīng)127
可知,3.9V對應(yīng)AD結(jié)果為97
采樣輸出電壓值,可以針對性的調(diào)整一下占空比輸出,從而得到誤差允許范圍內(nèi)的一個控制輸出電壓。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論