本實驗:驅動一個步進電機,實驗要求一個按鍵可以控制步進電機啟動和停止,一個按鍵控制正反轉。
2023-08-17 09:24:57 291
291 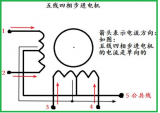
如何采用uln2003模塊來鏈接步進電機?51單片機是如何控制步進電機正反轉的?
2021-10-13 08:04:30
求一個步進電機DM422的控制程序
2017-05-31 10:27:03
步進電機控制系統設計一個開環步進電機控制系統。使得步進電機能夠正常運轉。并能實現啟停、正反轉、調速控制。以及顯示速度。2.設計要求如下:①硬件測試通過。接線完成。三個芯片分別測試通過。步進電機
2021-06-29 06:48:40
步進電機控制程序(c語言+51單片機)#include#define uint unsigned int#define uchar unsigned char#define ms *77// f
2021-06-28 09:35:46
# 提問者采納步進電機控制程序(c語言+51單片機)#include#define uintunsigned int#define uchar unsigned char#define ms *77
2021-08-31 08:44:03
關注公眾號:伊斯電子編程回復:步進電機控制程序還有更多資源等你來領取
2021-07-07 06:40:00
步進電機控制程序液晶顯示一、實驗目的二、實驗內容三、實驗步驟四、C代碼如下五、實驗結果六、實驗體會一、實驗目的(1)畈轉(2)調速(3)鍵盤輸入(4)數碼管顯示二、實驗內容(1)人按下不同的鍵,分別
2022-01-19 07:42:04
步進電機控制程序編寫,在3399上控制步進電機,即控制GPIO口,需要使用庫WiringPi,其相關資料和使用方法參考http://wiki.friendlyarm.com/wiki
2021-07-08 09:59:08
步進電機正反轉控制C語言程序,只為初學者只為初學者的步進電機正反控制程序#include#define uchar unsigned char#define uintunsigned
2021-07-05 06:41:16
上一篇博文簡介了一下步進電機控制程序的配置和思路。這一篇就介紹步進電機驅動器的簡介以及使用方法。這里我們以TB6600步進電機驅動器為例,進行介紹。其他型號的驅動器也大同小異。如圖是我們使用的步進
2021-06-29 09:01:06
步進電機是如何實現正反轉的?怎樣去編寫其代碼?
2021-10-14 09:49:35
本文收集整理關于實現步進電機自動正反轉程序怎么寫的相關議題,使用內容導航快速到達。內容導航:Q1:用c語言程序實現步進電機的正反轉加減速的編程內容:1、本程序用于測試4相步進電機常規驅動2、需要用跳
2021-06-29 06:09:19
Arduino mixly如何控制28BYJ-48步進電機正反轉?
2021-10-14 08:44:43
怎樣將步進電機控制接入blinker平臺呢?blinker平臺是怎樣去控制步進電機正反轉及加減速的?
2021-10-15 07:32:13
新手上路,請高手指教。現有labview軟件;一個步進電機及驅動控制板(單片機+驅動芯片);相應的數據采集設備(數據采集卡+傾角傳感器)。目前通過控制板附帶的源程序能夠手動控制步進電機的正反轉和加
2014-03-10 17:36:34
RT,新手上路,請高手指教。現有labview軟件;一個步進電機及驅動控制板(單片機+驅動芯片);相應的數據采集設備(數據采集卡+傾角傳感器)。目前通過控制板附帶的源程序能夠手動控制步進電機的正反轉
2013-04-19 09:14:15
一個匯編語言的步進電機速度控制程序
2016-01-22 14:43:08
基于51單片機控制步進電機正反轉此次采用uln2003模塊來鏈接步進電機;## 步進電機工作原理步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或
2021-06-28 12:36:36
控制步進電機正反轉的實際應用程序是怎樣的?怎樣去編寫程序?
2021-06-29 06:59:23
步進電機的正反轉控制直接給方向引腳給高低電平即可。光電開關被遮擋時,引號引腳輸出高低電平#include#define uint unsigned int***it motor = P1^0;//位
2021-06-28 09:38:43
如何去實現步進電機的正反轉加減速的編程?步進電機自動正反轉程序該怎么去寫?單片機怎樣實現步進電機的正反轉c程序?
2021-06-29 07:28:20
單片機是如何控制步進電機正反轉的?如何去編寫其程序代碼?
2021-10-14 08:04:18
原創單片機步進電機控制程序(C語言程序寫的,包含調速,正反轉,位置控制)
2013-03-23 13:07:32
基于51單片機的步進電機正反轉調速系統控制_仿真+源程序+詳細教程采用:Keil5.0編程main.c程序
2021-06-28 13:53:25
如何使用PWM的相位控制步進電機正反轉和加減速?
2021-10-14 09:19:38
如何去控制步進電機的正反轉?控制步進電機正反轉的目的是什么?
2021-06-29 08:30:49
步進電機驅動板的原理是什么?如何去控制步進電機的減速、加速以及正反轉?
2021-06-30 07:27:11
前言 上一講我們已成功實現對步進電機的正反轉動控制,并簡單的通過調節節拍間的延時時間實現了簡單的轉速控制(開環),這一節將繼續給大學介紹在STM32中通過定時器方式來實現節拍間的精確延時操作,并
2021-07-08 08:30:20
怎么實現c語言電機正反轉/步進電機正反轉?
2021-10-14 06:44:04
如何限定步進電機只在一個角度內轉動呢?怎樣通過光電管去控制步進電機的正反轉呢?
2021-10-18 06:11:01
求51單片機上步進電機的按鍵控制程序C語言,只要能正反轉
2017-02-20 07:56:16
求LABVIEW做上位機的源程序,與單片機做下位機控制步進電機正反轉的源程序
2015-10-18 14:54:15
求助各位大神給個兩相步進電機的控制程序,只要簡單的正傳即可,主要是用來參考,多謝!
2013-09-09 16:57:46
求大佬分享基于c語言和51單片機的步進電機控制程序
2021-10-13 08:48:20
控制程序函數*****************************************************/voidmotor_ccw(void)//電機反轉函數{uchar i,j;for(j=0;j
2016-04-24 09:41:44
匯編源程序是如何實現步進電機的正反轉的?匯編源程序是如何實現步進電機的加減速的?
2021-07-06 07:53:05
單片機控制直流電機的PWM調速=步進電機直流電機正反轉控制(程序+仿真)
2015-05-01 15:36:55
萌新求助,求一個步進電機c語言控制程序
2021-10-27 06:29:16
萌新求助,求大佬分享步進電機c語言控制程序
2021-10-27 07:42:47
萌新求助,請大佬分享一個控制步進電機正反轉的實際應用程序
2021-10-15 08:11:07
請問51單片機如何控制步進電機正反轉?
2021-10-14 07:40:19
請問51單片機是如何控制步進電機正反轉的?
2021-10-14 06:42:29
blinker是如何控制步進電機的正反轉以及加減速的?有哪些程序?
2021-06-29 06:11:38
步進電機驅動原理是什么?python-樹莓派如何通過按鍵控制步進電機正反轉?
2021-10-09 08:45:55
請問光電開關如何控制步進電機正反轉?
2021-10-14 08:31:50
論壇的各位大神們,步進電機輸入兩個信號然后正轉和反轉,怎樣才能將這兩個信號提取出來,我把四個黑、黃、棕、藍四根線分別接到三極管B極上,E極統一接地,C極接89C51上,結果沒什么作用。請問各位大神有沒有什么辦法把步進電機正反轉的兩組信號提取出來??
2020-07-21 08:10:35
步進電機控制程序(PLC控制)
2008-10-10 14:35:02 65
65 步進電機控制程序(C語言+89c51單片機)
2008-10-10 14:37:081117 本文介紹的是通過對步進電機的控制程序設計,實現了用軟件對步進電機進行升、降速控制。
2009-04-02 15:21:2725 控制步進電機正反轉的實際應用程序:/*這是一個控制步進電機正反轉的實際應用程序*/ /*選用的是三相步進電機驅動器,p14口線用做步進電機的脈沖控制*/ /*p13口線用做步進電機的方向
2010-01-09 15:13:25146 步進電機控制程序ST
2010-01-09 15:19:176 摘要:介紹了一種基于微機和單片機的步進電機控制系統,利用上、下位機控制步進電機的多種運行方式,可實現步進電機正反轉控制以及步進電機的無級調速。程序采用模塊化設計,通
2010-07-22 21:16:4176 步進電機控制程序(c語言+51單片機)
#include<reg51.h>
#define uint unsigned int#define uchar unsigned char#define ms *77// f = 12 M#define LEDLen 4
2008-10-10 14:38:1628321
四相步進電機的正反轉二相勵磁電路
2009-02-09 14:00:582036 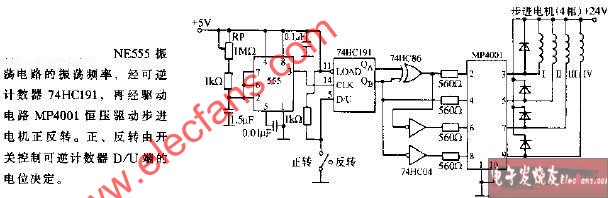
西門子smart控制步進電機正反轉,測試通過。。
2015-12-11 17:22:5821 正反轉可控的步進電機Proteus仿真正反轉可控的步進電機Proteus仿真
2015-12-22 17:45:10209 步進電機的正反轉控制,獨立鍵盤輸入控制電機旋轉方向和圈數
2016-01-11 17:56:3646 步進電機控制程序液晶顯示程序,快來學習吧。
2016-05-12 16:25:3133 步進電機的啟動控制以及對其轉速的改變和注釋得編寫
2016-07-12 15:29:436 基于8051的Proteus仿真-正反轉可控的步進電機
2022-03-22 18:08:3451 2路直流電機驅動模塊正反轉PWM調速+雙H橋步進電機迷你電機
2017-07-21 08:48:0189 之前嘗試用單片機控制42步進電機正反轉,電機連接導軌實現滑臺前進后退,在這里分享一下測試程序及接線圖,程序部分參考網上找到的,已經實際測試過,可以實現控制功能。
2019-04-15 18:22:0016 本文檔的主要內容詳細介紹的是使用51單片機進行步進電機正反轉的程序資料免費下載。
2019-05-05 08:00:0046 本文檔的主要內容詳細介紹的是正反轉可控的步進電機仿真原理圖免費下載。
2019-12-25 15:34:4433 資源使用說明:
定時器:
■步進電機控制器采用兩個定時器cputimer0 和 cputimer2;
■cputimer0 為步進電機每一步的周期計數,定時器的計數初值為0XFFFF,計數
2020-03-24 15:02:0012 本文檔的主要內容詳細介紹的是步進電機控制程序免費下載。
2020-06-04 08:00:007 的加速和減速的控制,還可以實現正反轉控制。同時顯示模塊能夠實時顯示當前步進電機的速度和正反轉狀態。它的最大的創新不僅僅是因為可以控制步進電機的速度,更在于它根據步進電機的工作原理,通過程序計算出來了步進電機的工作轉速
2021-06-07 09:11:3727 基于51單片機控制步進電機正反轉此次采用uln2003模塊來鏈接步進電機;## 步進電機工作原理步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度
2021-11-11 13:21:0617 基于51單片機的步進電機正反轉調速系統控制_仿真+源程序+詳細教程采用:Keil5.0編程main.c程序
2021-11-17 12:06:0350 基于51單片機的步進電機正反轉調速系統控制_仿真+源程序+詳細教程采用:Keil5.0編程main.c程序
2021-11-21 15:51:0824 89c52單片機控制兩個步進電機正反轉加減速(程序+仿真)先上圖:源代碼
2021-11-23 17:06:3140 正反轉可控的步進電機
2021-11-25 14:36:1021 正轉;按下“Negitive(反轉)” 按鍵時,控制步進電機反
轉;按下“加速”按鍵時,控制步進電機加速;按下“減速” 按鍵時,控制步進電機減速。4位數碼管,左邊兩位顯示正反
轉,正轉顯示“11”,反轉顯示“00”,右邊兩位顯示轉速檔次,步進電機的轉速1~30檔在右邊兩位
2023-03-21 15:25:243 設計一個開環步進電機控制系統。使得步進電機能夠正常運轉。并能實現啟停、正反轉、調速控制。以及顯示速度。
設計要求如下: ①硬件測試通過。接線完成。三個芯片分別測試通過。步進電機能夠正常運轉
2023-03-23 10:56:581 作為電機
驅動;可通過按鍵控制正反轉及速度;四位數碼管第1位顯示電機的正反轉,第3位和第4位顯示電機運行速度的檔數;五個紅色LED,一個為電源指示,四個指示電機的轉速。
2023-03-24 11:39:014 基于AT89C51單片機正反轉可控的步進電機Proteus仿真及程序
2023-05-04 15:30:274 基于89C51單片機的步進電機正反轉源程序
2023-05-16 09:42:019 步進電機正反轉的換線方法 步進電機是一種常見的電機類型,它具有正反轉的能力。換線是指改變步進電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細介紹其中一種常見的換線方法。 步進電機
2024-01-23 14:45:51663
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論