步進電機都是通過脈沖信號控制的,一般都是一個用來產生一定頻率脈沖的單片機(脈沖頻率用來控制速度),經過信號隔離放大(達到驅動電機的電壓)來驅動控制步進電機。
2013-08-19 10:04:28 4167
4167 ,wm 是電機的機械角速度,p 為極對數,kt 是轉矩常數,J 為轉動慣量,B 為摩擦系數,Tl 是負載系數。 從以上方程可以看出,僅控制 iq 我們就可以控制轉矩的大小,d軸電壓也僅與 iq有關,這樣極有益于我們的控制。 并且,當 id=0 時,相當于一臺典型的他勵直流電動機,定子只有
2021-03-22 15:56:4213600 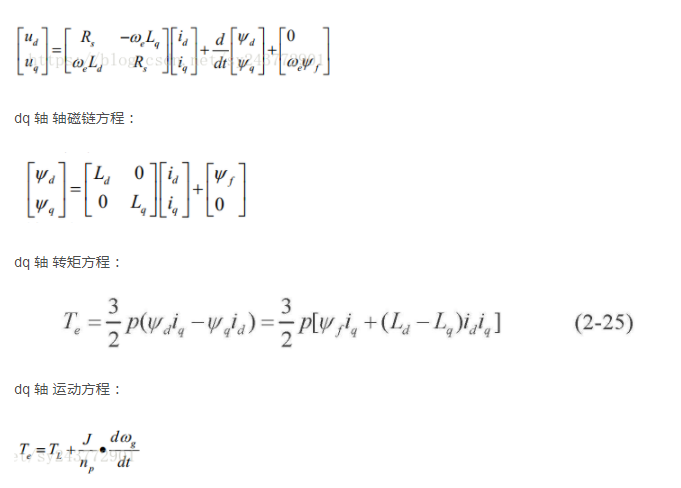
1 永磁同步電機MTPA的控制原理 1.1 MTPA控制方式與id=0控制方式的區別 當電機采用id=0的控制策略,但是這種控制方法忽略和磁阻轉矩的作用 。 ? 這個從轉矩方程最容易看出來,轉矩分為
2021-03-22 16:30:3611293 
口電機控制的核心是在直流電壓和電壓利用率的約束內,盡量輸出更大的轉矩達到更高的轉速。因此需要找到合理的Id/Iq指令組合用于控制,實現預期的性能目標。
口可以通過標定不同轉速和轉矩下的Id/Iq指令,形成二維表格用于控制。
2023-05-29 10:05:29624 
請幫忙解答下,IQ converter與IQ modulator的區別,謝謝!
2018-12-26 14:24:28
所耗費的時間。在第一種情況中,IQ2010系統配合待測器件(DUT),以不同數據傳輸率送出信號。再加上組件驅動器以及測試程序的支持能力,IQ2010系統能一次捕獲多個突發數據率,并減少其自身與待測器件
2019-12-30 22:55:32
所耗費的時間。在第一種情況中,IQ2010系統配合待測器件(DUT),以不同數據傳輸率送出信號。再加上組件驅動器以及測試程序的支持能力,IQ2010系統能一次捕獲多個突發數據率,并減少其自身與待測器件
2020-01-17 10:05:45
最近導師給我了幾個信號樣本,都是用IQ模式采集的,保存成wav格式,利用wav格式的左右聲道分別保存IQ路的數據,然后又給了我一個其中一個信號樣本合路后的樣本,就是把IQ合路成實信號了,要我把其他
2019-10-04 22:20:05
在實際使用電機驅動器控制電機的時候,PID的整定方法采用實驗中的試湊法,但是電機的響應曲線怎么獲得?
2016-11-17 17:45:25
的磁場ANT控制。在右側的這里,是電機和測量相位電流、轉軸位置,這些信號饋回到控制算法中。使用Clarke和Park變換,將三相電流轉換成代表扭矩和通量組分(也稱為Id和Iq)的DC量。為此,用測得的轉軸
2018-06-21 11:50:12
這里提一個實際應用中簡單的方法:利用simulink的PID參數調節的工具。涉及到幾個公式:電機模型簡化為: 1/(R+L?s)假如實際的電機控制系統的采樣和更新PWM寄存器的方式如下,還會
2022-10-08 11:38:25
://v.youku.com/v_show/id_XNjUxNTA5ODI0.html本人做的直流無刷電機220V控制視頻http://v.youku.com/v_show/id_XODY0MzE4MDAw.html本人
2017-10-21 04:09:15
電機控制群 42400784本人做的單相電機調速視頻 PID速度環 誤差小http://v.youku.com/v_show/id_XNjUxNTA5ODI0.html本人做的直流無刷電機220V
2018-04-25 12:43:25
USER_IQ_FULL_SCALE_CURRENT_A (10.0)// 10.0 Example for hvkit_rev1p1 typical usage 這個參數是說ID,IQ的1PU代表10A實際電流嗎?還是代表電機的最大電流,如果
2020-06-19 13:47:26
表1所示某款典型永磁同步電機的基本參數,主要用于電動汽車的動力電機。為了獲得該電機的實際電感變化趨勢,需要進行一些實驗,但本文將不介紹具體實驗方法。實測得到的Lq~iq數據、Ld~id數據導入Matlab環境中做曲線擬合,根據最小二乘法原理去除個別測量值的誤差,最終得...
2021-08-27 06:16:18
、iC,在兩相坐標系下的ia、ib和在旋轉兩相坐標系下的直流id、iq是等效的,它們能產生相同的旋轉磁動勢。D-Q坐標變換的應用電機坐標變換理論在電氣工程領域已經被廣泛應用,不但在電機控制及瞬態分析
2018-10-11 11:14:52
坐標系轉換為相對定子靜止的兩相坐標系,得出對應的變換輸出Iα和Iβ,然后使用park變換,將相對定子靜止的兩相坐標系轉換為相對轉子靜止的兩相坐標系從而算出ID和IQ。電機控制過程是反變換過程,首先設定
2023-03-06 17:45:31
調速通常指控制某一物體速度的改變,那么怎么控制物體速度的改變呢?電機調速指標都是什么?
2021-03-05 07:32:54
合理設定電流的分配對轉矩實現高效控制,現階段常用的算法為MTPA控制和id=0控制。id=0控制Id=0控制十分簡單,直接令id=0作為給定值就可以,iq的給定值通過轉速閉環PI控制器生成的轉...
2021-08-27 06:28:00
仔細權衡,以便在電池壽命期間獲得最大的容量,因此,較低的IQ并不能始終保證長電池壽命。需要注意IQ 在雙極拓撲中的表現。IQ 不但隨負載電流變化很大,而且在壓降情況下會有所增加。另外,需要注意在數據表中
2011-06-16 16:10:52
PMSM foc 在調試電流單閉環時,設置id=0,Iq如何給定??電機額定電流1.1A極對數=4Rs=20.3Ls=0.032 請各位前輩賜教,謝謝!
2016-02-20 15:57:32
時的定子電流達到最小,進而減小損耗,提高電機的效率,所以重點是要討論使用何種控制方法實現同樣的轉矩而電流達到最小。2、在PMSM的數學方程中我們知道電磁轉矩的方程為Te=1.5*P*[fluxf
2018-09-24 11:25:47
小弟使用F407控制PMSM, 利用矢量控制。在做電流(Id和Iq閉環)單閉環時,IPARK和park中的電角度是不是只能用函數生成的電角度,而不能使用編碼器反饋算出來的實際電角度??我使用函數生成
2016-02-19 08:25:28
旋轉變換后得到正交的電流量 Id、Iq,其中Iq與轉矩有關,Id與磁通有關。在實際控制中,常將Id置為0。得到的這兩個量不是時變的,因此可以單獨的對這兩個量進行控制,類似直流量控制一樣。而不需要
2019-11-01 09:33:58
1、SVPWM的生成在FOC矢量控制中,Id、Iq 經過PID輸出Vd、Vq。Vd、Vq經過反park變換成Vα、Vβ。再經過Vα、Vβ合成空間參考矢量Uref。那么怎么根據Vα、Vβ確定Uref
2021-09-06 07:58:01
的控制。但是這種假設僅限于低速的情況,在高速情況下,id分量會變得很高,致使iDC=iq就不成立了。 我們來看看FOC FOC電流力矩控制算法讀取無刷直流電機(通常為ia 和 ib)的相電流。此外
2023-03-28 17:41:38
;Out -= _IQ(1.0);else if (v->OutOut += _IQ(1.0);}rampgen.c在電機控制中的作用是什么?請說的詳細些
2019-06-11 16:57:36
simulink電機仿真學習 - 基本坐標變換在學習simulink過程中,發現park變換出來的id\iq仍然是交流電,心想這么簡單的變化都不對,懵逼,然后在大佬的講解下,知道了simulink
2021-09-13 09:21:58
stm2.0庫中hTorque_Reference的十進制數值與實際的交軸電流iq是多少的比例關系,hFlux_Reference的十進制數值與實際的直軸電流id是多少比例關系,有大神標定過嗎
2015-07-01 22:16:17
,從而使得交流電機有類似于直流電機的控制性能。2、矢量控制技術的概述三相永磁同步電機的矢量控制技術通常包含三個主要部分:轉速控制環,電流控制環和PWM控制算法。傳統的矢量控制技術包含Id=0控制方式
2018-09-19 19:19:33
用定子電流矢量的幅值和矩角β表示,另外一種是用Id和Iq表示。 2.不同應用場合對永磁電機的要求 2.1 恒速并網運行 關于永磁電機的轉矩我們接下來講第二個問題,就是不同場合對永磁電機的要求
2023-03-01 10:59:13
沒有一毛錢的關系,即使電機不轉,我們只要給定子繞組通Id和Iq電流,電機就會產生轉矩,所以我們可以自由的通過控制Id和Iq來精準的控制轉矩。 第四,當電磁轉矩要求比較大的時候,定子電流是不可能無限
2023-03-01 11:15:47
不管ID IQ 看矢量控制函數是否正常, 也可以用VS先仿真,看波形。1.3 限制UD UQ的電壓 從而限制PWM占空比 輸出 以免過流, 比如開始可以限到 +-1V 沒問題慢慢提高,不然電機都轉不起來。1.4 然后看 ID IQ PID是否能調整 ...
2021-06-28 06:55:06
的升壓控制器,例如NCV8877啟動停止非同步升壓控制器。例如,NCV8877在非激活時將為Iq總數再增加12μA(典型值)。圖3- 具有預增壓器的典型汽車系統電源框圖如果負載電流較低或效率較低,則可
2018-10-12 11:54:00
有誰知道C8051F507-IQ中的IQ是什么意思么知道的說聲謝了
2013-05-27 15:26:00
前言 ST MCSDK中PID部分功能代碼在pid_regulator.c文件中,電機庫中電機iq,id以及速度環控制均采用PI(對應pi_controller接口)控制
2021-08-03 07:21:04
同步發電機可以通過電樞反應來調節有功功率和無功功率。 而電樞反應主要與外界的負載性質有關(阻性,感性,容性)電機學194頁電樞電流可以分為直軸Id和交軸Iq兩個分量,交軸分量控制有功功率,直軸分量控制
2021-09-03 06:01:50
回收IQ2010 IQ2011 IQ2012 IQ2015藍牙測試儀WiFi測試銷售 回收 租賃 維修東莞市安捷電子儀器有限公司景(先生) :171-9030-4760 QQ:76967857景經理
2018-09-05 21:28:59
的CAN通訊其實也學到了一些東西,CAN通訊主要就是對電機的ID號發送信息,最重要的三個部分就是:1.電機ID號碼,這個通常是可以根據電機自帶軟件更改的,控制的時候注意以下就好2.波特率,這個也很簡單,說明書就有3.發送的消息,一般情況下就是八個字節,都是十六進制調試經驗:一般情況下先在WIND
2021-06-28 09:42:22
這兩個電流就相當于靜態電流,我們控制他就非常容易了,所以我們的控制就是經過PARK變換后的值,經過PID后就Iq增大或者減小來控制電機的轉動速度和力,請注意:我們一般情況下是Id=0的控制方式,當然還有弱
2020-07-28 14:29:27
文章目錄EASII中CL的查看PL:峰值延續和門限參考期望值CL:電流持續限制及電機阻滯保護參數ID、IQ:有功電流、無功電流EASII中CL的查看PL:峰值延續和門限參考期望值CL:電流持續限制及電機阻滯保護參數ID、IQ:有功電流、無功電流...
2021-09-13 08:54:38
大家好,我現在手頭有4個MAXON的無刷電機,其中有兩臺的電感非常小 都是幾十微亨大小的,另外兩臺差不多都是幾百微亨的,電感大點兩臺電機,我通過電流環給定一個較小iq,id=0,iq的反饋值可以跟蹤
2017-12-13 16:54:58
交流一個問題。轉差型矢量控制異步電機,電流環控制理想,加上轉速環后,在正常運行情況下,改變轉速給定,(變負或者w*-w過大)電動機會失控(電機不斷加速,此時轉速與iq*相反)。有哪位做電機時碰到過這種問題,交流一下,多謝了
2018-05-14 10:00:41
的解耦控制。 主要是對電機的控制電流進行矢量分解,變成勵磁電流IdId 和交軸電流IqIq ,勵磁電流主要是產生勵磁,控制的是磁場的強度,而交軸電流是用來控制力矩,所以在實際使用過程中,我們常令Id
2019-10-14 10:51:09
大家好!我正在使用PXA IQ分析儀(基本)模式對I / Q數據進行采樣。我嘗試將跟蹤保存到儀器中,然后我得到了一種我不知道的格式的跟蹤,看起來不像復雜的I和Q數據與時間(樣本)。當我嘗試使用遙控器
2019-01-28 15:24:23
當我使用扭矩儀進行測試時,我計算出的扭矩大約是扭矩儀的 2 倍。我的計算中有什么遺漏嗎?我想使用 FOC Iq 電流測量電機負載轉矩。
2022-12-16 07:00:53
怎樣去調試永磁同步電機FOC矢量控制中電流環PI控制器的參數?如何對Iq,Id進行PID控制器的參數整定?
2021-09-23 09:12:48
程序中有一句_iqSpeedRef=_IQ(0.15),其中全局的Q格式是24,可不可以這樣理解,speedref的十進制的數值就是0.15*2^24的值?求助ti人,1.怎樣理解IQ的計算?2,程序中的iq值可以看作是標幺值嗎
2020-05-14 08:44:24
;autoDesignWidth\\\": false
}
}
]
二、關鍵代碼及知識點在開發IQ- EQ測試應用的過程中,主要運用了容器組件、裝飾器、頁面路由和AppStorage等。下面,我們就結合
2022-06-23 12:01:24
simulink仿真PID,并封裝起來。??目標:使用Simulink基礎模塊搭建電流環的PI控制器,然后封裝成Mask。1,PID基礎知識??電機中使用的電流環Id\Iq是用來保持電流的恒定輸出,一般都是...
2021-06-28 13:45:56
步進電機在控制的過程中怎么提高控制的精度
2023-10-12 06:02:50
大家有沒有遇到Iq/Id Reference 需要微調達到最優的控制效果,即同等功率情況下最大效率率,你還在完全依賴于仿真結果?有沒有一種可以自動獲取最佳組合的手段呢?如果按照如圖所示的結構來獲取最佳組合,是不是可行呢?請大蝦們指點!
2016-10-24 20:33:29
以Level4為例1.請問這里面的lsw變量的三個狀態0、1、2是調試的時候通過變量窗口改變的嗎?因為在代碼中沒有找到哪里改變lsw變量的值,都是用lsw的值來做判斷2.從level4理解,永磁電機
2018-09-11 10:14:56
如下:在永磁同步電機中通常采用 id = 0,所以:可見電磁轉矩和 q 軸電流成正比,只要對電流進行控制就達到了控制轉矩的目的。同時這樣也能保證最大的輸出轉矩。其運動方程如下:其中TL,J 分別為電機
2014-01-22 09:46:51
我要做的是永磁同步直線電機伺服系統的simulink仿真,電機模型搭好了,用svpwm發波,采用Id=0的控制方法。想用試探法來調電流環PID參數的時候,我給定一個Iq值比如10,再給定Id=0
2017-03-23 16:39:31
性能,因此必須依據電動機的動態數學模型。永磁無刷電機的動態數學模型為非線性、多變量,它含有ω與id或iq的乘積項,因此要得到精確的動態控制性能,必須對ω和id,iq解耦。近年來,研究各種非線性控制
2018-10-31 10:45:53
本人新手一枚,最近調試永磁同步電機控制策略,發現電機三相電流Ia/Ib/Ic 很爛,里面有三個PI 調節器,即Speed/Iq/Id,各級模塊,如電流采樣、變換,速度計算等環節單獨計算都沒有
2016-06-12 09:52:47
閉環控制為例的,也就是讓電機始終產生一個恒定的力矩(也就是恒定的電流,因為力矩和電流成正比)。控制流程如下:對電機三相電流進行采樣得到Ia,Ib,Ic。將Ia,Ib,Ic經過Clark變換得到Iα,Iβ。將Iα,Iβ經過Park變換得到Iq,Id。計算Iq,Id和其設定值Iq_ref
2021-08-30 06:22:46
本帖最后由 luky1117 于 2017-4-22 21:12 編輯
電流環的Kp,Ki已經調試完成(采用FOC算法控制永磁同步電機),Iq給定和Iq反饋波形都一致,但是發生了不太理解的一
2017-04-22 21:01:37
的技術核心是在轉子磁場旋轉坐標系中針對激勵電流Id和轉矩電流iq分別進行控制,并且采用的是經典的PI線性調節器。系統能夠呈現出良好的線性特性,可以按照經典的線性控制理論進行控制系統的設計,逆變器的控...
2021-08-27 07:38:34
位置的反饋。(一個電角度周期=編碼器分辨率/極對數)所以在控制起初的編碼器零點的電角度偏移量就是很重要的一個參數,角度不對,Iq、Id的控制就不準確了。當知道1.此時轉子的電角度2.編碼器的值。計算編碼器零點電角度偏移。一個電角度周期對應的編碼器的值mt_angle_encode = sen
2021-09-03 06:08:34
由于后面的MTPA和弱磁都準備在矢量控制的基礎下進行,在此記錄下矢量控制的其他波形,供日后參考。1 id=0的矢量控制1.1 轉速+轉速環輸出波形+電流環iq輸出波形1.2 電流環iq輸出+電流環id輸出+iqid反饋1.3轉速+轉矩波形...
2021-08-27 07:59:07
專家,您好:有個事情不懂,想請教您一下。在TI公司提供的2812矢量控制例程pmsm3_1中,為什么CLARKE變換,需要_IQ15toIQ轉換呢,多謝!
2018-08-31 09:35:40
同步電機控制,經過PARK變換后,得到IQ和ID。然后分別進行各自的PI運算之后得到UD UQ。為什么ID IQ分別進行各自的PI運算之后得到UD UQ???
2019-01-22 06:36:01
堵死了。。。最近這三個pi環節的參數整定搞的很沒頭緒,查看了論壇里面很多pi調節的帖子,關于同步電機id、iq pi參數整定感覺沒有結合實際操作說清楚的。。。所以在這里專門發個帖請大家指點迷津,正在做相關實驗的同學也可以一起交流下。
2018-10-08 10:59:30
\HVPM_Sensorless_2833x中關于28335對電機控制的例程,但是里面的程序仍然是利用_IQ格式處理的,這是不是代表著沒用到28335本身的浮點運算能力啊?完全體現不出來28335優勢啊!我想問一下有沒有利用28335的FPU進行電機控制的例程?
2018-11-22 10:06:27
速度控制一般都是有變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內達到幾千轉,由于伺服都是閉環的,速度非常穩定。
2018-12-26 17:33:357607 本文檔的主要內容詳細介紹的是三菱電機微型可編程控制器MELSEC iQ-F系列FX5的模擬量手冊說明。
2019-11-18 08:00:00 2
2 利用 VHDL 硬件描述語言在 FPGA 中設計直流伺服電機控制器。其含 4 路 PWM 控制器,每個控制器均分配一個 ID,當地址線 Address 選中某個 ID 時,表明對該 PWM 控制
2020-05-11 08:00:0013 本文檔的主要內容詳細介紹的是IQ-F系列三菱電機可編程控制器MELSEC的用戶手冊免費下載
2020-08-18 08:00:002 由于后面的MTPA和弱磁都準備在矢量控制的基礎下進行,在此記錄下矢量控制的其他波形,供日后參考。 1 id=0的矢量控制 1.1 轉速+轉速環輸出波形+電流環iq輸出波形 如圖給定轉速為1000r
2021-03-22 16:22:363577 三菱電機微型可編程控制器MELSEC iQ-F FX5-4DA硬件手冊
2022-08-23 14:39:271 MELSEC iQ-F 凸輪輸出控制FB參考 產品規格書下載
2022-08-25 15:34:542 MELSEC iQ-F FX5 用戶手冊 (安全控制篇) 產品規格書,本手冊記述的是iQ-F系列安全擴展模塊有關的操作
2022-08-24 17:20:361 MELSEC iQ-R 柔性高速I/O控制模塊FB參考 產品規格書
2022-08-24 11:16:280 MELSEC iQ-R PROFINET IO控制器模塊FB參考 產品規格書
2022-08-24 11:13:300 本參考手冊的FB是MELSEC iQ-L系列CPU模塊中安裝的MELSEC-L柔性高速I/O控制模塊用的模塊FB。
2022-08-25 15:12:332 MELSEC iQ-R C語言控制器模塊編程手冊 產品規格書
2022-08-26 16:14:500 MELSEC iQ-R 柔性高速I/O控制模塊用戶手冊(應用篇) 產品規格書
2022-08-26 15:56:550 電機控制的核心是在直流電壓和電壓利用率的約束內,盡量輸出更大的轉矩達到更高的轉速。因此需要找到合理的Id/Iq指令組合用于控制,實現預期的性能目標。
2022-12-05 11:29:47492 在進行電機矢量控制時,需要通過坐標變換將三相電流ia,ib,ic轉換為id,iq,要實現正確的坐標變換,必須知道電機轉子的準確位置,很多電機安裝有霍爾傳感器,根據霍爾傳感器在任何狀態都可以準確
2023-03-13 11:18:480 目前傳統的矢量控制常見的方法有 id=0 控制和最大轉矩電流比控制,前者主要適用于標貼式三相PMSM,后者主要用于內嵌式PMSM。但這里說明一下,對于表貼式PMSM,Id=0控制和最大轉矩電流比控制
2023-03-13 10:46:362 。
本文采用id = 0的控制方式。
電流閉環控制需要實現dq軸電流解耦,矢量控制中使用clark變換和park變換實現dq軸電流的解耦,永磁同步電機控制筆記:clark變換park變換示意圖中對相關原理做出了說明。
本次實驗為了降低模型復雜度,不使用clark,par
2023-03-15 09:55:031 利用率的約束內,盡量輸出更大的轉矩達到更高的轉速。因 此需要找到合理的Id/Iq指令組合用于控制,實現預期的性能目標。 □可以通過標定不同轉速和轉矩下的Id/Iq指令,形成二維表格用于控制。
2023-04-28 11:17:199 伺服電機速度控制和轉矩控制都是用模擬量來控制,位置控制是通過發脈沖來控制。
2023-05-24 09:44:00655 
齒輪減速電機的齒輪分為斜齒輪和直齒輪。為什么很多齒輪減速電機的齒輪都是斜的?我們可以通過比較得出原因。
2021-11-13 14:38:05732 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論