伺服電機多用于高精尖的控制系統(tǒng),它具有多樣化智能化的控制方式,并帶有反饋系統(tǒng),完成閉環(huán)控制。在測功機中,可以進行對拖,伺服電機將控制特性的優(yōu)勢進一步擴大。
2015-11-26 09:31:51 6875
6875 ,UWB技術(shù)發(fā)展至今稱得上足夠可靠,而且性價比高,能實現(xiàn)厘米級精準定位的芯片技術(shù)革命。UWB技術(shù)厘米級定位帶來的豐富應(yīng)用場景在各類微距定位上有著十足的潛力。根據(jù)ABI Research的預(yù)測,今年UWB設(shè)備的出貨量將超五億臺,其中智能手機對UWB的推
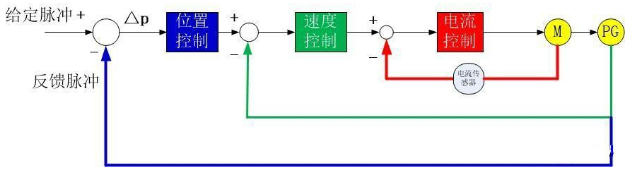
2022-10-12 17:06:513701 既可以控制電機的速度也可以控制電機的力矩。 伺服控制可比作是捕食時的蒼鷹。蒼鷹捕食動作之快,目標定位之準!同樣的伺服控制就是精準定位和快速響應(yīng)。伺服是將電流環(huán)、速度環(huán)、位置環(huán)都閉合才能進行的控制。交流
2016-02-01 14:59:55
,如果你要求它轉(zhuǎn)半度,是不可能實現(xiàn)的。注意步進電機也可以用作伺服。伺服電機一般是功率小,運行精確,能高速制動,慣量小,適合閉環(huán)控制,也就是能檢測到實際位置和理論位置的誤差,并消除. 步進電機:把一圈分成...
2021-06-28 08:44:47
較 從而達到一個閉環(huán)系統(tǒng)2.伺服電機只是接受命令完成某種動作的電機,普通電機也可做伺服電機用,所以伺服電機的種類很多;伺服系統(tǒng)那就復(fù)雜得多了。3.直流電機加上編碼器,加上編碼器是只是實現(xiàn)了閉環(huán)
2018-10-25 10:07:08
伺服電機的缺點有哪些?閉環(huán)步進電機的優(yōu)點有哪些?伺服電機和閉環(huán)步進電機有哪些不同之處?
2021-09-27 07:58:29
倍速鏈輸送具有哪些優(yōu)點?伺服電機和步進電機的控制方式有何區(qū)別?伺服電機和步進電機的過載特性有何區(qū)別?
2021-10-11 06:31:15
變化的自動控制系統(tǒng)。伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會
2018-10-26 11:28:38
【不懂就問】伺服電機的控制,典型分為三個環(huán),位置環(huán)、速度環(huán)、電流環(huán)其中涉及的一個控制參數(shù)“位置前饋增益”怎么理解
2018-07-24 08:41:25
也分成開環(huán)、閉環(huán)和半閉環(huán)3種類型,就是與伺服系統(tǒng)這3種方式相關(guān)。??1、開環(huán)系統(tǒng)??開環(huán)系統(tǒng),它主要由驅(qū)動電路,執(zhí)行元件和機床3大部分組成。常用的執(zhí)行元件是步進電機,通常稱以步進電機作為執(zhí)行元件的開環(huán)
2021-01-05 10:13:47
開閉環(huán) Open closed loop——————關(guān)于伺服電機和步進電機的部分原理差異步進電機與伺服電機的本質(zhì)都是通過驅(qū)動器控制電機,但是在控制原理上有不同之處。Step and servo
2021-06-28 07:10:10
各位前輩好,我想問個問題。我電腦接了個運動控制卡,連接伺服驅(qū)動器,驅(qū)動器連接伺服電機。電機通過編碼器把數(shù)據(jù)反饋給了驅(qū)動器,驅(qū)動器在內(nèi)部構(gòu)成了閉環(huán)。問題來了,我能不能不加其他編碼器,就通過電機
2017-12-19 21:48:30
構(gòu)、凸輪、鏈條驅(qū)動等負載發(fā)生變動的情況下,也可不用通過增益調(diào)節(jié),便實現(xiàn)定位。而伺服電機中伺服系統(tǒng)的增益對電機性能有很大影響,而且調(diào)節(jié)伺服增益是很費時又費力的事情。03穩(wěn)態(tài)靜止,無抖動?伺服電機在停止時候
2022-11-12 11:24:12
市場上常見3D打印機電機選用的是開環(huán)步進電機,出于成本、體積、控制算法實現(xiàn)難以程度,開環(huán)步進電機可以達到acceptable的控制效果。伺服電機是被現(xiàn)在的工程師們所推崇和津津樂道的,提到運動控制不談
2021-06-27 06:38:44
市場上常見3D打印機電機選用的是開環(huán)步進電機,出于成本、體積、控制算法實現(xiàn)難以程度,開環(huán)步進電機可以達到acceptable的控制效果。伺服電機是被現(xiàn)在的工程師們所推崇和津津樂道的,提到運動控制不談
2021-06-28 07:50:24
伺服電機具有哪些缺陷?閉環(huán)步進電機與伺服電機對比分析哪個好?
2021-09-27 08:13:44
伺服電機有哪些缺陷?閉環(huán)步進電機有哪些優(yōu)點?
2021-09-28 08:45:48
的,提到運動控制不談伺服電機幾乎不可想象,工程師們癡迷于伺服電機的閉環(huán)控制,沉醉于高響應(yīng)和高速性及高精度的優(yōu)點,真正地“三高”。但是,正所謂尺有所短,寸有所長,伺服電機也有它不可避免的如下...
2021-06-27 06:26:46
什么是混合伺服?閉環(huán)步進電機的基本特性有哪些?
2021-10-09 06:09:11
CAN總線步進伺服一體機閉環(huán)步進電機具有哪些特點及優(yōu)點?
2021-10-12 08:37:07
電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。速度控制一般都是有變頻器實現(xiàn),用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫...
2021-09-06 06:00:20
/工牌型定位標簽,即可實時獲取人員精確位置數(shù)據(jù),定位精度達到分米級。結(jié)合企業(yè)需求,提供二維/三維的精準定位服務(wù),實現(xiàn)人員定位、軌跡回放、攀高監(jiān)測、電子圍欄、智能巡檢、自動考勤、一鍵求救等業(yè)務(wù)功能。幫助
2020-07-30 17:54:28
項目名稱:(競賽類)室內(nèi)無gps無人機的精準定位試用計劃:申請理由:本人具有2年的嵌入式系統(tǒng)開發(fā)的經(jīng)歷,參加過各種機器人類競賽。此次申請使用此款激光雷達是做學(xué)校參加大疆RoboMaster比賽
2020-05-28 17:34:19
,它的精確度就越高,伺服電機取塊于自帶的編碼器,編碼器的刻度越多,精度就越高。2.控制方式不同一個是開環(huán)控制,一個是閉環(huán)控制。3. 低頻特性不同步進電機在低速時易出現(xiàn)低頻振動現(xiàn)象,當它工作在低速時一般
2017-07-13 13:18:49
在運動控制系統(tǒng)中,為了實現(xiàn)對電機速度或者位置的良好控制,常常采用多重閉環(huán)的結(jié)構(gòu)。比如有刷直流電機調(diào)速系統(tǒng),交流永磁同步電動機伺服系統(tǒng),都采用了類似的結(jié)構(gòu),除此之外,閉環(huán)系統(tǒng)一般采用 PI 控制器或者
2021-08-06 11:21:23
交流伺服電機伺服電機主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會
2021-06-28 07:13:40
調(diào)用WIN32 函數(shù)實現(xiàn)精準定時的VI
2015-08-14 10:29:46
停車系統(tǒng)進行集中管理,相信應(yīng)該會好很多。精準定位智慧停車系統(tǒng)目前,太原市已經(jīng)開始著手建設(shè)“互聯(lián)網(wǎng)+”與北斗精準定位智慧停車系統(tǒng),結(jié)合車位傳感及智能收費管理終端,創(chuàng)新無人值守道路停車管理,實現(xiàn)不停車支付
2017-08-08 17:07:26
直流減速電機:電機1000r/min,減速后200r/min。電機尾部帶有增量式霍爾編碼器,分辨率12PPR。現(xiàn)想實現(xiàn)統(tǒng)計霍爾脈沖數(shù)進行位置和速度調(diào)節(jié),各位大佬有沒有什么建議?目的是實現(xiàn)給定位置,精準定位。允許每次定位2個脈沖誤差。
2019-04-03 07:55:44
伺服電機驅(qū)動器的作用是什么?如何實現(xiàn)高精度且高定位來控制伺服電機?
2021-10-12 13:01:01
華天電力專業(yè)生產(chǎn)電纜故障測試儀,接下來為大家分享如何精準定位電纜故障。電力部門經(jīng)常對電纜進行大修,遇到電纜故障時如何正確處理?下面是對電纜故障精確點法的詳細介紹。首先,電纜故障精確定位方法的總結(jié)通常
2019-03-28 11:37:38
藍牙的接收信號強度指示器(RSSI)可用于估計距離已知固定點的距離,但這種技術(shù)對于諸如室內(nèi)定位系統(tǒng)(IPS)和資產(chǎn)跟蹤等應(yīng)用來說通常不夠精確。藍牙規(guī)范的更新提供了更精確的前進路徑。那么, 如何增強藍牙接收信號強度,實現(xiàn)精準定位?
2019-09-18 14:41:04
請問下為什么手機百度地圖在室內(nèi)也能精準定位?正常情況下,在室內(nèi)是無法GPS衛(wèi)星定位的,那只能通過網(wǎng)絡(luò)定位了,但是網(wǎng)絡(luò)定位不是不準么?求解。
2018-02-02 09:46:39
用速度來做閉環(huán)控制。3.加速度環(huán),就是用加速度來做閉環(huán)控制。這三種控制策略都能實現(xiàn)拓達步進電機的定位控制。但是速度環(huán)和加速度環(huán)不僅可以控制位置還能實現(xiàn)步進電機的速度和加速度的控制;而且速度環(huán)和加速度環(huán)
2018-08-25 10:05:53
步進電機與伺服電機對比分析采用閉環(huán)技術(shù)的步進電機
2021-02-05 06:05:47
用labview實現(xiàn)伺服電機的閉環(huán)控制,用PID(泛布爾算法)控制,有大神會么????
2017-12-19 17:02:45
我看市面上的產(chǎn)品大多藍牙產(chǎn)品都是通過檢測通斷報警,來實現(xiàn)一個防丟的功能,如何實現(xiàn)精準定位技術(shù)呢
2016-04-19 08:35:33
AD的PCB里的定位,怎么才能精準呢?做出的板子,定位孔總是偏一點。
2020-08-10 08:02:26
STM32G071怎樣通過DWT實現(xiàn)us精準定時?,各位大佬有實現(xiàn)的嗎?
2024-03-20 06:59:48
請問如何使用三菱伺服電機實現(xiàn)定位功能?
2021-09-26 07:03:54
目前正在做一個車載定位器,CPU:STM8L,GSM+GPS模塊:SIM868因為在室內(nèi)無法通過GPS衛(wèi)星定位,使用基站定位又誤差太大。所以想請問各位大神,有沒室內(nèi)精準定位的方案提供。謝謝!
2018-02-26 11:00:24
的增加而勻速下降。伺服電機有著很大的優(yōu)勢。但是,正所謂尺有所短,寸有所長,伺服電機也有它不可避免的缺點: 一、無法靜止 由于采用閉環(huán)控制,伺服電機本身結(jié)構(gòu)和電機的特性決定,伺服電機在停止時無法絕對
2015-12-29 15:21:11
應(yīng)用MC68HC05B6微控制器單元實現(xiàn)伺服電機閉環(huán)速度控制的基本電路及軟件:
2009-06-19 09:18:23 22
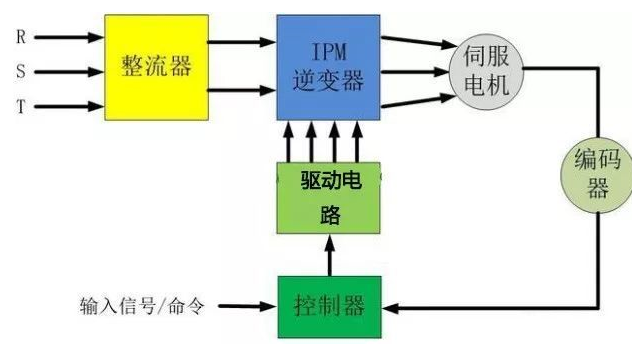
22 伺服電機主要的作用是用于高精度定位, 基本上普遍都是用pLC發(fā)出脈沖 通過私服驅(qū)動器來達到定位效果,而私服電機后面的編碼器可以反饋伺服電機的行程 與 PLC發(fā)出的脈沖做比較 從而達到一個閉環(huán)系統(tǒng).
2017-02-10 08:31:437526 伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖
2017-09-23 16:26:240 伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統(tǒng)。伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖
2017-10-11 15:22:326 FANUC 的伺服電機具有平滑的旋轉(zhuǎn)特性、優(yōu)秀的加速能力以及高可靠性。搭配內(nèi)置編矸馬器可以實現(xiàn)高精度定位與控制。FANUC 的伺服電機按照其驅(qū)動電壓的高低,可以分為低壓伺服電機(200V) 與高壓
2017-10-17 17:23:3620 由PLC與伺服電機組成一個系統(tǒng),通過PLC控制伺服電機,實現(xiàn)機構(gòu)的原點回歸、相對定位和絕對定位功能
2017-11-13 06:01:0032048 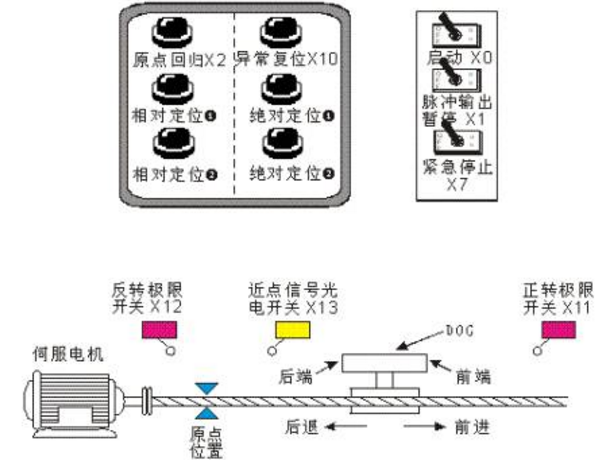
因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來,系統(tǒng)就會知道發(fā)了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉(zhuǎn)動,從而實現(xiàn)精確的定位,可以達到0.001mm。
2018-04-12 15:06:2613696 基于互聯(lián)網(wǎng)和精準定位的智能停車系統(tǒng)進行集中管理,相信應(yīng)該會好很多。 精準定位智慧停車系統(tǒng) 目前,太原市已經(jīng)開始著手建設(shè)“互聯(lián)網(wǎng)+”與北斗精準定位智慧停車系統(tǒng),結(jié)合車位傳感及智能收費管理終端,創(chuàng)新無人值守道路停車管理
2018-08-13 09:54:02379 是必不可少的。因為,多系統(tǒng)導(dǎo)航定位模塊極高追蹤靈敏度能夠擴大其定位的覆蓋面,在普通 GPS接收模塊 不能定位的地方,如狹窄都市天空下、密集的叢林環(huán)境等弱信號環(huán)境也能夠快速定位,真正實現(xiàn)精準定位,讓共享單車的定位也不會出
2018-08-13 11:27:01350 日本富士伺服電機絕對定位和相對定位 日本富士伺服電機是廣泛應(yīng)用于自動化生產(chǎn)行業(yè)中的一種設(shè)備產(chǎn)品,通過深圳日本伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。但是
2020-06-12 15:01:572348 速度控制一般都是有變頻器實現(xiàn),用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內(nèi)達到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
2018-12-26 17:33:357587 伺服電機是如何實現(xiàn)精準定位?如何理解它的閉環(huán)特性?今天我們就來說說。
2019-03-01 08:49:3115751 
5G北斗精準定位聯(lián)盟以推動5G定位系統(tǒng)與北斗衛(wèi)星定位系統(tǒng)發(fā)展為目標,構(gòu)建精準定位產(chǎn)業(yè)鏈合作、交流平臺,打造技術(shù)協(xié)同創(chuàng)新體系,推動精準定位政策、行業(yè)標準確立,探索精準定位創(chuàng)新商業(yè)模式,拓展產(chǎn)品新形態(tài)、新服務(wù),突破精準定位關(guān)鍵技術(shù),以實現(xiàn)核心設(shè)備、技術(shù)國產(chǎn)化。
2019-04-08 10:21:482414 本文主要闡述了直流伺服電機機械特性及它的控制方式。
2020-01-09 14:13:1415276 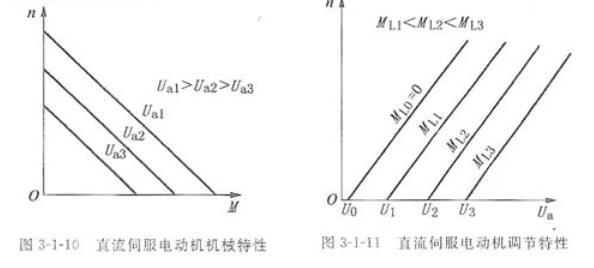
伺服電機定位原理很簡單,電機旋轉(zhuǎn)帶動絲桿轉(zhuǎn)換把旋轉(zhuǎn)量轉(zhuǎn)換成平移量,脈沖的數(shù)量就是移動的距離,我們只要知道脈沖情況就能計算出位置信息。
2020-06-25 18:14:004332 
云計算技術(shù)的出現(xiàn)有效解決了這一難題。其中,天翼云為共享車輛提供的技術(shù)化管理方案,可基于射頻識別(RFID)定位基站在車輛定位上時使用,實現(xiàn)了共享車輛的精準定位。以共享電動車為例,RFID基站安裝電信
2020-09-04 14:29:571732 日前,在蘇州舉辦的5G自動駕駛峰會上,中國移動啟動了公家5G新基建車路協(xié)同項目,并發(fā)布了“5G+高精準定位”系統(tǒng)。
2020-10-23 16:02:011608 因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來,系統(tǒng)就會知道發(fā)了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉(zhuǎn)動,從而實現(xiàn)精確的定位,可以達到0.001mm。
2020-11-26 10:31:185551 伺服電機和普通電機的區(qū)別 “伺服”是“跟隨”控制信號的意思,伺服電機能夠做到精準控制,可以控制讓轉(zhuǎn)多少就轉(zhuǎn)多少,并且它還有反饋裝置,能夠實現(xiàn)閉環(huán),也就是編碼器能夠反饋是否轉(zhuǎn)到了數(shù)量,所以伺服電機
2021-08-06 18:18:2550626 作為當下室內(nèi)定位技術(shù)的新貴,UWB定位技術(shù)現(xiàn)今在室內(nèi)定位領(lǐng)域的發(fā)展是很有前景的,得益于UWB技術(shù)具有穿透力搶、低功耗、抗干擾能力強、安全性高、系統(tǒng)簡單、定位精準等特點。利用UWB技術(shù),就能精準定位
2022-10-09 14:31:10590 UWB技術(shù)是如何做到室內(nèi)精準定位的? ? ? ? ?作為當下室內(nèi)定位技術(shù)的新貴,UWB定位技術(shù)現(xiàn)今在室內(nèi)定位領(lǐng)域的發(fā)展是很有前景的,得益于UWB技術(shù)具有穿透力搶、低功耗、抗干擾能力強、安全性高、系統(tǒng)
2022-10-18 09:22:52764 伺服電機靠脈沖來定位,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度。電機每旋轉(zhuǎn)一個角度,編碼器都會發(fā)出對應(yīng)數(shù)量的反饋脈沖,反饋脈沖和伺服驅(qū)動器接收的脈沖形成閉環(huán)控制,這樣伺服驅(qū)動器就能夠很精確的控制電機的轉(zhuǎn)動,從而實現(xiàn)精確的定位。
2022-10-19 08:58:381178 UWB室內(nèi)人員精準定位系統(tǒng) 室內(nèi)人員定位是指在室內(nèi)環(huán)境中完成方位定位,采用無線通訊、基站定位、慣導(dǎo)定位等多種技能集成來構(gòu)建一套室內(nèi)方位定位體系,然后完成人員、物體等在室內(nèi)空間中的方位監(jiān)控。 相比
2022-10-24 11:05:23475 交流伺服系統(tǒng)包括:伺服驅(qū)動、伺服電機和一個反饋傳感器(一般伺服電機自帶光學(xué)偏碼器)。所有這些部件都在一個控制閉環(huán)系統(tǒng)中運行:驅(qū)動器從外部接收參數(shù)信息,然后將一定電流輸送給電機,通過電機轉(zhuǎn)換成扭矩帶動負載,負載根據(jù)它自己的特性進行動作或加減速
2022-11-03 14:36:50619 交流伺服系統(tǒng)包括:伺服驅(qū)動、伺服電機和一個反饋傳感器(一般伺服電機自帶光學(xué)偏碼器)。所有這些部件都在一個控制閉環(huán)系統(tǒng)中運行:驅(qū)動器從外部接收參數(shù)信息,然后將一定電流輸送給電機,通過電機轉(zhuǎn)換成扭矩帶動負載,負載根據(jù)它自己的特性進行動作或加減速
2022-12-06 15:20:42869 “由PLC+伺服控制器+伺服電機(配套設(shè)備)+編碼器(外部設(shè)備端)組成的全閉環(huán)系統(tǒng),如何實現(xiàn)??我的方法是由PLC無限脈沖給伺服器,當達到要求工藝位置(外部編碼器連接至PLC)時PLC停止脈沖輸出,但實際停連位置不夠準確,大概是由于,達到位置再停止信號會因為伺服器的減速停車而誤差!!”
2023-02-06 17:33:193108 閉環(huán)伺服其實就是伺服電機,因為它有編碼器結(jié)構(gòu),能夠反饋電機的運動狀態(tài),形成閉環(huán)控制。和其他開環(huán)控制的電機相比,伺服電機的位移精度是比較高的,給一個脈沖就移動一個位置,斷電后電機轉(zhuǎn)子就不動了,不會因為
2023-02-15 16:30:07456 ??????? UWB室內(nèi)精準定位系統(tǒng)方案 ??????? UWB室內(nèi)定位由定位標簽和定位基站組成,通過定位基站與定位標簽的UWB定位信道實現(xiàn)對定位標簽的定位。 ??????? UWB標簽作為定位
2023-03-09 15:04:59631 通信與精準定位展,是IOTE物聯(lián)網(wǎng)展旗下的子展之一,每年上半年上海、下半年深圳進行展出,屆時主辦方將力邀海內(nèi)外通信與高精準定位的知名企業(yè)、以及上下游企業(yè)蒞臨參展,搭建最佳的展示及業(yè)內(nèi)交流平臺。 通信
2023-03-24 10:45:40383 
伺服系統(tǒng)(servo?mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟跟隨輸入目標(或給定值)的任意變化的自動控制系統(tǒng)。
2023-05-09 11:00:401066 
伺服主要靠脈沖來定位。基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移
2023-05-11 17:34:24734 
高精準定位系統(tǒng)支持10厘米工業(yè)級高精準定位,同時支持UWB,藍牙,WIFI定位
2023-06-14 17:25:21643 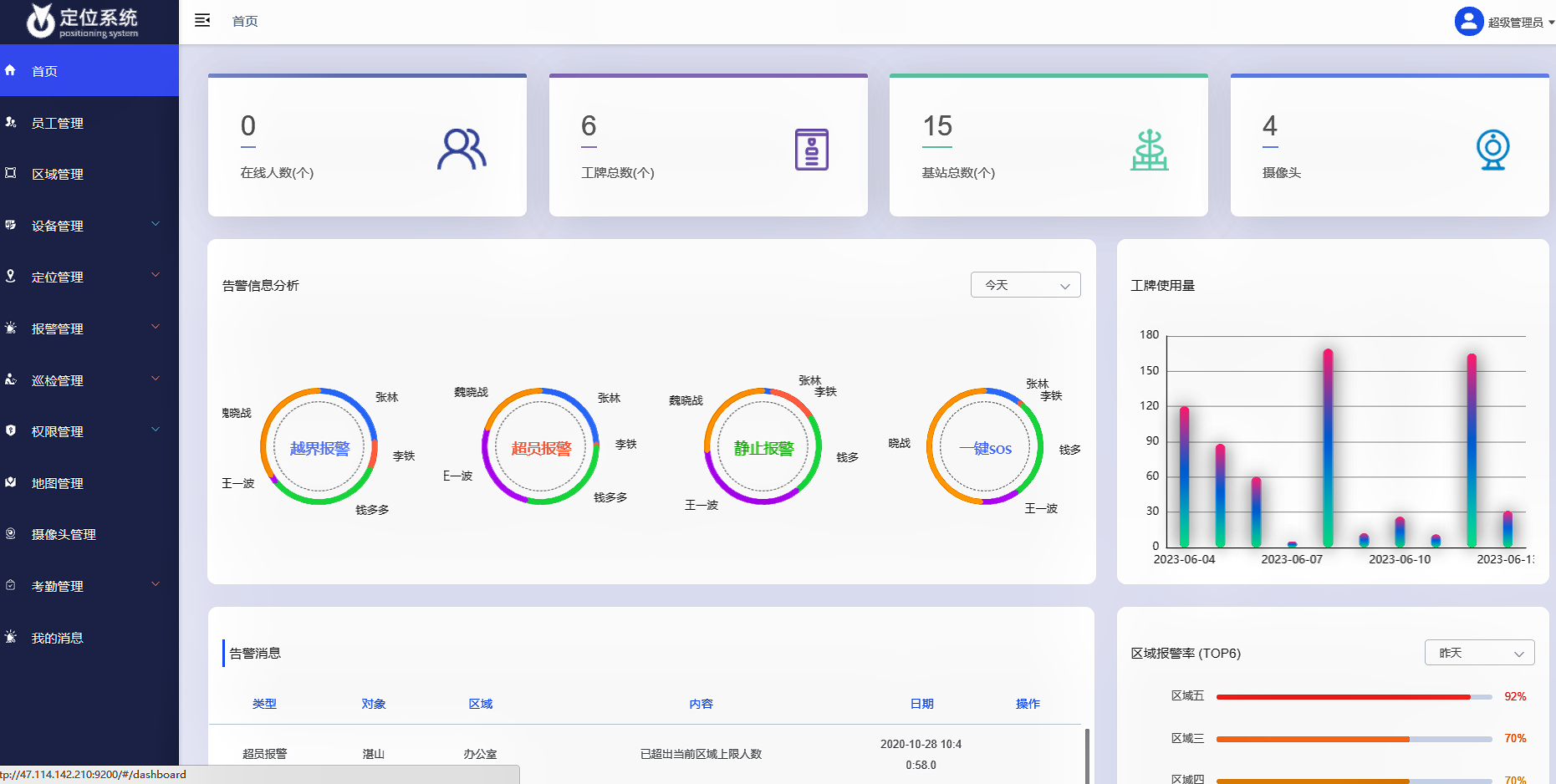
電子發(fā)燒友網(wǎng)站提供《伺服電機定位校準方法教程.zip》資料免費下載
2023-06-28 11:03:461 PLC控制伺服到底需要哪些信號就可以實現(xiàn)定位控制了?下面給大家分享兩種控制。
2023-08-11 10:20:53329 
全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)在自動駕駛車輛中發(fā)揮著關(guān)鍵作用,幫助實現(xiàn)精準定位和導(dǎo)航。以下是GNSS中高精度定位定向模組M20如何助力自動駕駛車輛的精準定位: 定位準確性: GNSS系統(tǒng)中高精度定位
2023-08-24 18:17:49375 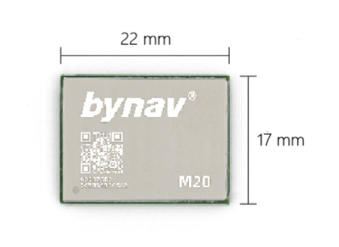
長沙12座北斗基準站賦能精準定位 湖南是全國第一個全域低空空域管理改革試點拓展省份,正積極利用高精度北斗定位技術(shù)優(yōu)勢和價值,推動北斗和通航產(chǎn)業(yè)深度融合與協(xié)同發(fā)展。衛(wèi)星遙感、北斗定位等技術(shù)正加速
2023-08-29 17:33:34932 全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)在自動駕駛車輛中發(fā)揮著關(guān)鍵作用,幫助實現(xiàn)精準定位和導(dǎo)航。以下是GNSS中高精度定位定向模組M20如何助力自動駕駛車輛的精準定位: 定位準確性: GNSS系統(tǒng)中高精度定位
2023-09-11 17:52:21343 
要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環(huán)控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:39248 
,但是加上閉環(huán)控制系統(tǒng)就可以稱之為伺服系統(tǒng)中的電機。 伺服電機是在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的電動機,它搭配上驅(qū)動器,形成一個完整的伺服系統(tǒng),就能夠精準地控制速度、位置等。伺服電機具有線性度高、起動轉(zhuǎn)矩大、運行范
2023-11-16 16:13:33285 伺服位置誤差大的原因及解決方法 伺服電機是一種精密控制裝置,可以實現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測量誤差
2023-12-25 13:57:521856 的運動控制。原點設(shè)置是伺服系統(tǒng)調(diào)試和運行的基礎(chǔ),它直接影響著電機的定位精度和運動控制的準確性。 在伺服電機系統(tǒng)中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初
2023-12-25 13:57:591135 在伺服電機系統(tǒng)中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:02585 伺服電機的精確定位方法及分類簡介 伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)
2024-02-20 13:53:09125 
伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移,因為,伺服電機本身具備發(fā)出脈沖的功能,所以伺服電機每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖
2024-01-20 09:44:56347 請教伺服電機絕對定位和相對定位問題? 伺服電機是一種能夠根據(jù)輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業(yè)領(lǐng)域得到廣泛應(yīng)用,數(shù)據(jù)中心、機器人、醫(yī)療設(shè)備等都離不開伺服電機的運動控制。而伺服
2024-02-05 17:39:501071 ? ? ? 伺服電機是一種能夠根據(jù)輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業(yè)領(lǐng)域得到廣泛應(yīng)用,數(shù)據(jù)中心、機器人、醫(yī)療設(shè)備等都離不開伺服電機的運動控制。而伺服電機的定位方式有兩種,一種
2024-03-18 08:39:4428 
激光打標機:精準定位,實現(xiàn)個性化標識需求激光打標機,以其精準定位的特性,成為實現(xiàn)個性化標識需求的得力工具。在現(xiàn)代制造業(yè)中,個性化標識已成為產(chǎn)品差異化、品牌塑造和提升附加值的重要手段。激光打標機通過
2024-03-19 19:43:5861 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論