文章從芯線測(cè)量原理、電容測(cè)量裝置設(shè)計(jì)、測(cè)量儀器選擇、測(cè)量步驟、影響測(cè)量的誤差來(lái)源分析等方面對(duì)測(cè)量方法進(jìn)行闡述。
2011-11-14 10:34:41 14687
14687 
鋰離子電池自放電的測(cè)量方法主要分為兩大類:1)靜置測(cè)量方法,通過(guò)對(duì)電池進(jìn)行長(zhǎng)時(shí)間的靜置得到自放電率;2)動(dòng)態(tài)測(cè)量方法,在動(dòng)態(tài)過(guò)程中實(shí)現(xiàn)對(duì)電池的參數(shù)識(shí)別。
2022-08-30 09:58:233763 鋰離子電池自放電的測(cè)量方法主要分為兩大類:1)靜置測(cè)量方法,通過(guò)對(duì)電池進(jìn)行長(zhǎng)時(shí)間的靜置得到自放電率;2)動(dòng)態(tài)測(cè)量方法,在動(dòng)態(tài)過(guò)程中實(shí)現(xiàn)對(duì)電池的參數(shù)識(shí)別。
2022-09-29 14:12:341978 4.0電機(jī)參數(shù)的含義及測(cè)量方法1.首先給出workbench中設(shè)置電機(jī)參數(shù)的兩張圖片:根據(jù)workbench中對(duì)電機(jī)需要的參數(shù)來(lái)看,作如下的整理翻譯及解釋2.Magnetic structure
2021-06-29 08:20:45
用300控制三臺(tái)110步進(jìn)電機(jī),電機(jī)180轉(zhuǎn)以上的時(shí)候振動(dòng)不明顯,但到90到150轉(zhuǎn)時(shí)振動(dòng)比較大。
1、可能是90和150是電機(jī)的共振區(qū)?
2、網(wǎng)上說(shuō)加個(gè)減速器或者加大驅(qū)動(dòng)器細(xì)分可以避免這個(gè)共振區(qū)
2024-01-10 08:06:26
不正確地驅(qū)動(dòng)步進(jìn)電機(jī)很容易導(dǎo)致電機(jī)發(fā)出“嗡嗡”的噪聲和很大的振動(dòng)。 當(dāng)驅(qū)動(dòng)步進(jìn)電機(jī)時(shí),如果發(fā)現(xiàn)步進(jìn)電機(jī)處于靜止?fàn)顟B(tài)時(shí),其內(nèi)部都發(fā)出很明顯的噪音,有點(diǎn)類似線圈快速變化那種,一般是由于線圈電流過(guò)大導(dǎo)致
2018-10-25 10:08:32
用51單片機(jī)通過(guò)ULN2803驅(qū)動(dòng)步進(jìn)電機(jī),步進(jìn)電機(jī)只有振動(dòng),振動(dòng)的同時(shí)我用手給一個(gè)轉(zhuǎn)的力才會(huì)轉(zhuǎn)動(dòng), 會(huì)不會(huì)是步進(jìn)電機(jī)壞了,而且步進(jìn)電機(jī)震動(dòng)起來(lái)很燙手,溫度很高
2023-10-17 07:26:17
不正確地驅(qū)動(dòng)步進(jìn)電機(jī)很容易導(dǎo)致電機(jī)發(fā)出“嗡嗡”的噪聲和很大的振動(dòng)。當(dāng)驅(qū)動(dòng)步進(jìn)電機(jī)時(shí),如果發(fā)現(xiàn)步進(jìn)電機(jī)處于靜止?fàn)顟B(tài)時(shí),其內(nèi)部都發(fā)出很明顯的噪音,有點(diǎn)類似線圈快速變化那種,一般是由于線圈電流過(guò)大導(dǎo)致
2018-10-12 10:34:27
步進(jìn)電機(jī)噪聲大的原因,步進(jìn)電機(jī)的特性測(cè)量和噪音和振動(dòng)的測(cè)量,步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測(cè)量方法-暫態(tài)(阻尼)特性的測(cè)量前言基本信息前言說(shuō)明6.4 暫態(tài)(阻尼)特性的測(cè)量6.5 噪音和振動(dòng)
2021-07-08 09:03:40
步進(jìn)電機(jī)基礎(chǔ)(8.2)-步進(jìn)電機(jī)的問(wèn)題解決方案-降低振動(dòng)噪音的解決方法前言基本信息前言說(shuō)明8.2 降低振動(dòng)噪音的解決方法1. 與驅(qū)動(dòng)電路有關(guān)的方法2. 與電機(jī)有關(guān)的方法降低振動(dòng)和噪音效果好的方法如下
2021-07-08 09:40:18
步進(jìn)電機(jī)基礎(chǔ)(6.1)-步進(jìn)電機(jī)的特性測(cè)量方法-靜態(tài)特性前言基本信息前言說(shuō)明說(shuō)明6.1 靜態(tài)特性1 . 靜態(tài)轉(zhuǎn)矩特性2. 靜 態(tài) 轉(zhuǎn) 矩 特 性 測(cè) 量1.轉(zhuǎn)矩表:2. 滑輪重量法:3. 應(yīng)力計(jì)
2021-07-07 07:28:34
步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測(cè)量方法-動(dòng)態(tài)特性的測(cè)量法前言基本信息前言說(shuō)明6.1 靜態(tài)特性1 . 滑輪平衡法前言基本信息名稱描述說(shuō)明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者王自強(qiáng)前言
2021-07-08 07:46:31
測(cè)量高速信號(hào)快速的、比較干凈的測(cè)量方法是什么
2021-05-07 07:13:16
測(cè)量方法的分類1) 直接測(cè)量與間接測(cè)量(1) 直接測(cè)量直接測(cè)量是直接得到被測(cè)量值的測(cè)量方法。例如用直流電壓表測(cè)量穩(wěn)壓電源的輸出 電壓等。(2) 間接測(cè)量與直接測(cè)量不同,間接測(cè)量是利用直接測(cè)量的量與被
2017-06-15 10:08:31
LED亮度調(diào)節(jié)、電機(jī)轉(zhuǎn)速控制等。而在某些特殊應(yīng)用中,我們也需要通過(guò)測(cè)量輸入PWM的占空比,來(lái)實(shí)現(xiàn)不同的輸出控制,這就需要使用到PWM占空比的測(cè)量方法。這里介紹三種不同的測(cè)量方法:阻塞方式、中斷方式以及定時(shí)器捕獲功能。
2021-02-03 07:52:09
我用51單片機(jī)通過(guò)ULN2803驅(qū)動(dòng)步進(jìn)電機(jī),步進(jìn)電機(jī)只有振動(dòng),振動(dòng)的同時(shí)我用手給一個(gè)轉(zhuǎn)的力才會(huì)轉(zhuǎn)動(dòng), 會(huì)不會(huì)是步進(jìn)電機(jī)壞了,而且步進(jìn)電機(jī)震動(dòng)起來(lái)很燙手,溫度很高啊
2019-07-07 19:35:37
(J)、轉(zhuǎn)矩常數(shù)、摩擦系數(shù)等。其中機(jī)械參數(shù)往往難以測(cè)量,通常在調(diào)試過(guò)程中確定,本文主要介紹電氣參數(shù)最常用、最簡(jiǎn)單的測(cè)量方法。2.數(shù)學(xué)模型永磁同步電機(jī)的電壓方程、磁鏈方程和力矩方程如圖1所示。3.轉(zhuǎn)子極
2022-10-12 15:31:27
什么是SPWMSPWM示波器的測(cè)量方法
2021-03-29 08:29:26
什么是微電流測(cè)量方法?差分、調(diào)制電路原理是什么?為達(dá)到pA級(jí)微電流測(cè)量需要注意什么?
2021-05-11 07:00:26
,以驗(yàn)證選擇的方法。使用者同時(shí)須有可迅速取得的設(shè)備、運(yùn)用合適的方法,以進(jìn)行例行性的重新校準(zhǔn)工作。本文將簡(jiǎn)述儀器設(shè)計(jì)架構(gòu),并概述所運(yùn)用的測(cè)量方法。
2019-05-31 07:51:04
系統(tǒng)檢測(cè)過(guò)程中,需要運(yùn)用到各種各樣的傳感器,傳感器的測(cè)量方法以及性能是檢測(cè)任務(wù)是否能夠順利完成的關(guān)鍵性因素。在實(shí)際操作過(guò)程中,需針對(duì)不同的檢測(cè)目的和具體情況進(jìn)行分析,然后找出切實(shí)可行的測(cè)量方法,再
2018-11-07 16:20:22
到切實(shí)可行的方式。器的測(cè)量方法按手段分類有:直接測(cè)量、間接測(cè)量和組合測(cè)量、按測(cè)量方式分類有:微差式、偏差式和零位式測(cè)量。按測(cè)量精度分類有:等精度和非等精度測(cè)量。按變化情況分類有:動(dòng)態(tài)、靜態(tài)測(cè)量。按敏感元件
2018-11-08 15:32:35
提出一種基于乘法器的模擬電路參數(shù)測(cè)量方法,闡述了該方法的基本原理,并進(jìn)行理論分析和數(shù)學(xué)推導(dǎo).利用LabVIEW軟件對(duì)該方法建模仿真.實(shí)驗(yàn)結(jié)果表明,運(yùn)用基于乘法器的模擬電路參數(shù)測(cè)量方法實(shí)現(xiàn)模擬電路參數(shù)
2010-06-02 10:07:53
。TRINAMIC所提供的驅(qū)動(dòng)和控制器可以達(dá)到256細(xì)分(8bit)采用集成的正弦波配置表格,步進(jìn)電機(jī)可以實(shí)現(xiàn)非常小的角度控制,圖6描述了在達(dá)到新位置時(shí)候的波動(dòng)。斬波和PWM模式噪音和振動(dòng)的另外一個(gè)來(lái)源
2021-08-12 14:48:05
常見的電流測(cè)量方法有哪些,其各自的優(yōu)點(diǎn)是什么?如何解決電流檢測(cè)難題?如何進(jìn)一步了解現(xiàn)代電流檢測(cè)放大器?
2021-04-08 06:51:41
振動(dòng)頻率是指與無(wú)源晶振(晶體諧振器)一起工作的振蕩電路的實(shí)際頻率。振動(dòng)頻率由無(wú)源晶體諧振器決定,并受MCU、外部負(fù)載電容、PCB雜散電容等的影響。測(cè)量方法(一)振動(dòng)頻率通過(guò)以下方程來(lái)計(jì)算。負(fù)載
2020-07-06 17:21:09
接地電阻的測(cè)量方法有哪幾種?接地電阻的計(jì)算方法有那幾種?
2021-04-09 06:05:08
請(qǐng)問(wèn)一下接觸電阻的測(cè)量方法有哪些?
2021-04-12 06:22:47
整流橋怎么測(cè)量好壞?這個(gè)測(cè)量方法是應(yīng)用什么原理呢?
2016-10-12 13:22:40
GB-T 6113.102-2008 無(wú)線電騷擾和抗擾度測(cè)量設(shè)備和測(cè)量方法規(guī)范 第1-2部分:無(wú)線電騷擾和抗擾度測(cè)量設(shè)備 輔助設(shè)備 傳導(dǎo)騷擾GB-T 6113.104-2008 無(wú)線電騷擾和抗擾度
2015-09-02 10:29:14
來(lái)自MPS的科普視頻,介紹了一些最基本的紋波測(cè)量方法,歡迎探討交流! ...
2022-01-03 07:19:18
系統(tǒng)的采樣速率要高(建議3K以上),能實(shí)現(xiàn)動(dòng)態(tài)轉(zhuǎn)矩測(cè)量;3) 要求轉(zhuǎn)矩檢測(cè)儀器能夠進(jìn)行數(shù)據(jù)處理。二、步進(jìn)電機(jī)的靜態(tài)測(cè)量方法測(cè)量齒槽轉(zhuǎn)矩圖示3:使用步進(jìn)電動(dòng)機(jī)的靜態(tài)測(cè)量方法示意圖 如圖3所示,將步進(jìn)
2018-11-01 11:13:11
永磁電機(jī) 磁鏈測(cè)量方法(反電勢(shì)法)需要讓永磁電機(jī)勻速旋轉(zhuǎn)(維持一個(gè)電周期的勻速就好了)。取永磁電機(jī)旋轉(zhuǎn)時(shí)的反電動(dòng)勢(shì)轉(zhuǎn)速這兩個(gè)的單位非常重要,按實(shí)際測(cè)量的話,反電動(dòng)勢(shì)一般是線電壓,取它
2021-08-31 06:14:17
隨著用電設(shè)備的多樣化和復(fù)雜化,線路中諧波的成分也變得越來(lái)越豐富,諧波污染的治理問(wèn)題也變得越來(lái)越棘手,許多儀器也相應(yīng)推出了諧波測(cè)量功能,我們?cè)撊绾螀^(qū)分這些諧波的測(cè)量方法并正確地使用他們進(jìn)行諧波測(cè)量呢
2019-06-10 07:56:58
究竟什么是特性阻抗? 特性阻抗的基本性質(zhì)、計(jì)算和測(cè)量方法是什么?
2021-04-21 06:24:01
采用光信號(hào)同步的間接測(cè)量方法的原理、工作過(guò)程和結(jié)構(gòu)分析
2020-12-31 06:31:40
電能質(zhì)量的測(cè)量方法如何排查電能質(zhì)量問(wèn)題?
2021-04-09 06:47:11
液體壓力管道壓力測(cè)量方法,要求效率和精度都比較高
2013-11-26 15:47:16
請(qǐng)問(wèn)電機(jī)參數(shù)的含義及測(cè)量方法是什么?
2021-10-19 08:54:17
發(fā)電機(jī)組輸出為額定電壓(空載)后加載純電阻性額定負(fù)載,進(jìn)行檢測(cè),檢測(cè)出的帶載能力必須符合要求。 測(cè)量方法與步驟: (1)發(fā)電機(jī)組在空載情況下,調(diào)整輸出電壓為整定值(400V
2010-11-03 16:14:55
高壓電壓及電流測(cè)量方法是什么?
2021-11-05 08:03:59
基于太陽(yáng)仿真器的測(cè)量方法
2009-02-23 21:57:14 15
15 軸中心高為56 mm及以上電機(jī)的機(jī)械振動(dòng)、振動(dòng)的測(cè)t、評(píng)定及限值 GB 10068-2000
本標(biāo)準(zhǔn)規(guī)定了脫離開任何負(fù)載或原動(dòng)機(jī)的旋轉(zhuǎn)電機(jī)在規(guī)定條件下振動(dòng)的測(cè)量方法和限值。本標(biāo)準(zhǔn)適
2009-02-25 17:02:38139 模擬測(cè)量方法和數(shù)字測(cè)量方法:高內(nèi)阻回路直流電壓的測(cè)量,交流電壓的表征與測(cè)量方法,低頻電壓的測(cè)量,等內(nèi)容。
2009-07-13 15:53:330 本文介紹了一種基于單片機(jī)的發(fā)動(dòng)機(jī)振動(dòng)速度、位移和加速度測(cè)量方法。該方法首先對(duì)發(fā)動(dòng)機(jī)的振動(dòng)傳感器信號(hào)進(jìn)行高、低通濾波,然后通過(guò)模擬開關(guān)將其轉(zhuǎn)化為電壓信號(hào),再
2009-08-10 08:14:3479 測(cè)量方法:以RPM(每分鐘轉(zhuǎn)數(shù))為單位的轉(zhuǎn)速測(cè)定用下面三種典型的方法之一來(lái)完成。
1.機(jī)械轉(zhuǎn)速測(cè)量
由機(jī)械測(cè)量傳感器進(jìn)行數(shù)據(jù)采集是測(cè)量RPM的傳統(tǒng)方法。傳感器中
2009-09-06 22:49:57119 熱工測(cè)量的概念和測(cè)量方法
本章講述了測(cè)量及測(cè)量誤差的基本概念,測(cè)量的一般方法,
2010-09-14 15:59:2912 頻率測(cè)量方法的改進(jìn)
2010-10-14 16:41:0020 摘要:介紹了一種采用視頻方式的點(diǎn)坐標(biāo)測(cè)量方法。方案設(shè)計(jì)巧妙,測(cè)量方法穩(wěn)定了可靠、精度高。該方法采用CCD攝像頭拍攝屏幕畫面獲取光點(diǎn)信號(hào),對(duì)攝像頭輸出
2006-03-24 13:13:141140 
可控硅的測(cè)量方法
一、概述
2007-12-22 11:33:1146968 
電力功率測(cè)量方法
從大的方面來(lái)看,很多領(lǐng)域都需要功率測(cè)量,而且不同領(lǐng)域功率測(cè)量的方法是大不相同的。例如
2008-12-04 11:27:412475 
實(shí)驗(yàn)三 振動(dòng)測(cè)量一、 實(shí)驗(yàn)?zāi)康?、掌握測(cè)試裝置動(dòng)態(tài)特性的系統(tǒng)組成及測(cè)量方法;2、掌握常用的兩種傳感器的工作原理、使用以及其配套儀器的使用;3
2009-03-17 10:43:562347 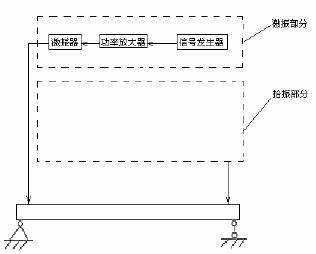
弱磁場(chǎng)的測(cè)量方法電路圖
2009-06-08 15:43:331304 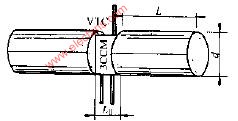
探討電池的內(nèi)阻及測(cè)量方法
每個(gè)電池都有
2009-11-10 12:03:59990 本內(nèi)容提供了基于PC架構(gòu)的網(wǎng)絡(luò)時(shí)延測(cè)量方法
2011-06-29 16:22:4728 電機(jī)轉(zhuǎn)速 和轉(zhuǎn)子位置的測(cè)量在電機(jī)交直流調(diào)速控制系統(tǒng)中占有重要的位置,為提高測(cè)量的精度和避免噪聲影響,多采用數(shù)字式測(cè)量方法。基于常規(guī)的M/ T 法,提出了電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置測(cè)量
2011-07-06 17:04:34166 鑫思科技提供發(fā)電機(jī)負(fù)載測(cè)試,發(fā)電機(jī)組絕緣電阻的測(cè)量方法,負(fù)載功率測(cè)試
2011-07-12 15:27:507501 本文扼要介紹了幾種 相位測(cè)量 方法。對(duì)雙向過(guò)零平均鑒相技術(shù)、高頻相位測(cè)量方法(取樣鎖相技術(shù))、低頻動(dòng)態(tài)相位測(cè)量和斷續(xù)信號(hào)相位測(cè)量作了較詳細(xì)地論述。對(duì)國(guó)內(nèi)外在這方面的新進(jìn)
2011-08-22 18:20:28112 基于對(duì)群延遲測(cè)量方法優(yōu)化的目的,采用數(shù)字信號(hào)處理的方法,設(shè)計(jì)了計(jì)算群延遲的計(jì)算機(jī)算法,將一部分測(cè)量工作轉(zhuǎn)化為計(jì)算機(jī)的計(jì)算工作,從而簡(jiǎn)化了測(cè)量方法,提高了測(cè)試效率。
2012-04-19 17:46:5721 基于迭代稀疏分解的介損角測(cè)量方法_律方成
2016-12-31 14:45:090 基于FPGA的亞穩(wěn)態(tài)參數(shù)測(cè)量方法_田毅
2017-01-07 21:28:580 先進(jìn)的步進(jìn)電機(jī)控制方法
2017-01-23 20:48:1616 在日常工作當(dāng)中,人們對(duì)了解傳感器的測(cè)量方法都不是很全面,那么傳感器的測(cè)量手法有哪些?下面我跟大家講解一下傳感器測(cè)量方法,就是傳感器測(cè)量時(shí)所采取的具體方法。
2017-01-19 15:02:592289 基于油罐液位測(cè)量方法的研究
2017-01-22 13:38:0813 當(dāng)驅(qū)動(dòng)步進(jìn)電機(jī)時(shí),如果發(fā)現(xiàn)步進(jìn)電機(jī)處于靜止?fàn)顟B(tài)時(shí),其內(nèi)部都發(fā)出很明顯的噪音,有點(diǎn)類似線圈快速變化那種,一般是由于線圈電流過(guò)大導(dǎo)致的。對(duì)于這種情況,最有效的接決方法是降低電機(jī)線圈中流過(guò)的電流,具體方法
2017-02-10 11:56:125741 基于電阻鏈移相的時(shí)柵高速測(cè)量方法研究_索龍博
2017-03-19 19:19:352 振動(dòng)傳感器在機(jī)械接收原理方面,只有相對(duì)式、慣性式兩種,但在機(jī)電變換方面,由于變換方法和性質(zhì)不同,其種類繁多,應(yīng)用范圍也極其廣泛。在現(xiàn)代振動(dòng)測(cè)量中所用的傳感器,已不是傳統(tǒng)概念上獨(dú)立的機(jī)械測(cè)量裝置,它僅是整個(gè)測(cè)量系統(tǒng)中的一個(gè)環(huán)節(jié),且與后續(xù)的電子線路緊密相關(guān)。
2018-07-10 13:35:0013260 本文開始介紹了步進(jìn)電機(jī)的基本原理,其次介紹了步進(jìn)電機(jī)工作效率以及使步進(jìn)電機(jī)的效率最大化的方法,最后介紹了步進(jìn)電機(jī)選型的步驟與方法。
2018-04-25 14:06:014299 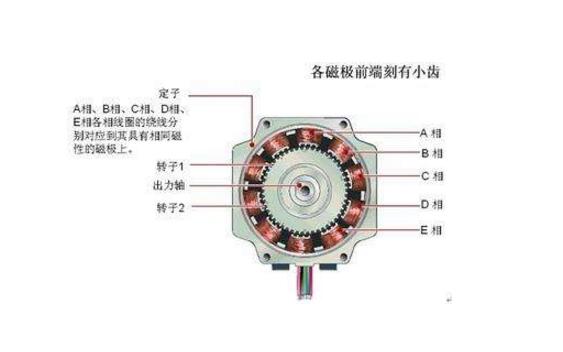
額定電壓(電流)驅(qū)動(dòng):參見前文《步進(jìn)電機(jī)的靜態(tài)轉(zhuǎn)矩特性及測(cè)量方法》一文的下圖,從額定電壓降低電壓來(lái)驅(qū)動(dòng)步進(jìn)電機(jī),發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 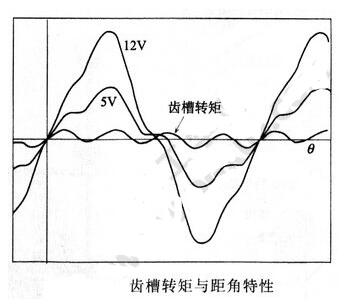
步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-10-08 15:36:133881 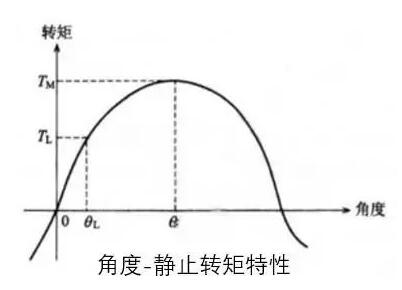
本文主要闡述了壓限器的測(cè)量方法及壓限器的作用。
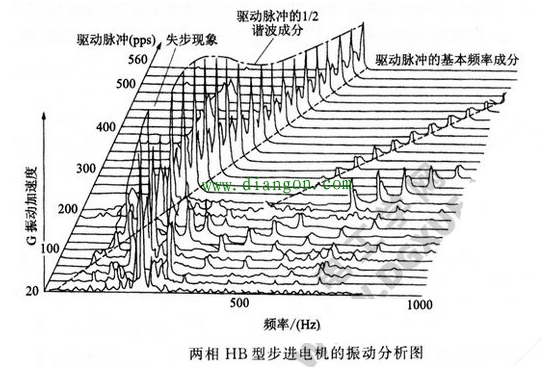
2019-11-27 10:00:373099 其中(1)的高次諧波為主要原因。步進(jìn)電機(jī)使用方波電流驅(qū)動(dòng),必然含有大量的高次諧波,由此產(chǎn)生振動(dòng)和噪音。因此驅(qū)動(dòng)電流最好為正弦波。接近正弦波的驅(qū)動(dòng)方法有步進(jìn)電機(jī)的細(xì)分步進(jìn)驅(qū)動(dòng)。下圖為電機(jī)1/4細(xì)分、半步、整步驅(qū)動(dòng)的振動(dòng)比較,其振動(dòng)為依次增加的。
2019-12-10 09:25:348494 為解決當(dāng)前測(cè)量樹高方法中存在測(cè)量誤差大、測(cè)量不便等問(wèn)題,提岀一種基于魚眼鏡頭的樹髙測(cè)量方法。該方法首先利用魚眼鏡頭成像模型確立世界坐標(biāo)系到圖像像素坐標(biāo)系的變換關(guān)系;然后以畸變系數(shù)的等距投影模型
2021-06-18 16:08:059 基于聲卡的直流信號(hào)測(cè)量方法分析(通信電源技術(shù)期刊幾類)-該資料為?基于聲卡的直流信號(hào)測(cè)量方法分析
2021-09-28 11:54:3512 ? GIS回路電阻測(cè)量方法根據(jù)測(cè)量的模式不同可以分為傳統(tǒng)GIS回路電阻測(cè)量方法和智能GIS回路電阻測(cè)量方法,接下來(lái)登豐電力帶大家熟悉一下傳統(tǒng)GIS回路電阻測(cè)量方法和智能GIS回路電阻測(cè)量方法。 傳統(tǒng)
2021-11-18 18:01:011666 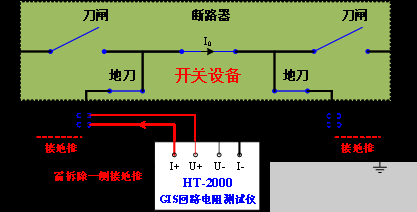
EMI濾波器插入損耗測(cè)量方法是根據(jù)CISPR17 (1981)出版物提出的濾波器標(biāo)準(zhǔn)測(cè)量方法包括共模、差模、常模和0.1Ω/100Ω阻抗測(cè)量方法。
2022-02-09 09:53:2524 鋰離子電池自放電的測(cè)量方法主要分為兩大類:1)靜置測(cè)量方法,通過(guò)對(duì)電池進(jìn)行長(zhǎng)時(shí)間的靜置得到自放電率;2)動(dòng)態(tài)測(cè)量方法,在動(dòng)態(tài)過(guò)程中實(shí)現(xiàn)對(duì)電池的參數(shù)識(shí)別。本期主要介紹動(dòng)態(tài)測(cè)量方法。
2022-07-10 15:22:083427 鋰離子電池自放電的測(cè)量方法主要分為兩大類:1)靜置測(cè)量方法,通過(guò)對(duì)電池進(jìn)行長(zhǎng)時(shí)間的靜置得到自放電率;2)動(dòng)態(tài)測(cè)量方法,在動(dòng)態(tài)過(guò)程中實(shí)現(xiàn)對(duì)電池的參數(shù)識(shí)別。
2022-07-10 15:29:162282 改進(jìn)步進(jìn)電機(jī)的扭矩和振動(dòng)設(shè)計(jì)
2023-03-07 16:58:19568 
克服旋轉(zhuǎn)振動(dòng)的CVD 系列 2 相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器
2023-03-08 11:00:28666 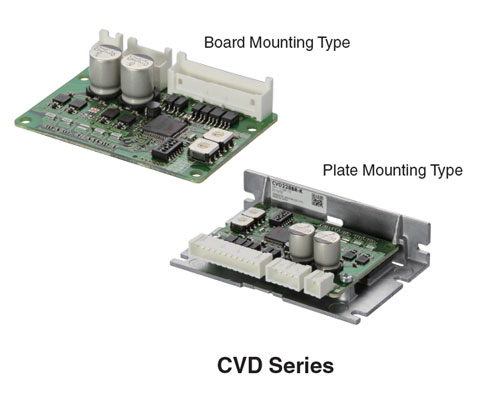
最簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)方法是單相雙極驅(qū)動(dòng)方式,也稱為雙相步進(jìn)驅(qū)動(dòng)方式。該方式只需要使用一個(gè) H橋驅(qū)動(dòng)器和一個(gè)脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2023-03-08 14:21:5612542 單相電機(jī)好壞的測(cè)量方法主要包括以下幾種:
觀察電機(jī)運(yùn)轉(zhuǎn)情況:可以通過(guò)觀察電機(jī)的運(yùn)轉(zhuǎn)情況來(lái)初步判斷電機(jī)是否存在故障。比如,電機(jī)是否正常啟動(dòng)、是否有噪音、是否轉(zhuǎn)速不穩(wěn)等等。如果發(fā)現(xiàn)異常情況,就可能存在電機(jī)故障。
2023-03-09 09:42:0710351 從本文開始,將介紹兩相雙極步進(jìn)電機(jī)和兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)電路,以及兩相雙極步進(jìn)電機(jī)和兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:05783 
應(yīng)用的電感測(cè)量方法原理、
步驟及優(yōu)缺點(diǎn)。直流暫態(tài)法原理簡(jiǎn)單,操作容易,但必須知道準(zhǔn)確的電機(jī)相對(duì)零位,并用外部夾具將電機(jī)轉(zhuǎn)子固定在相對(duì)零
位,所以相對(duì)零位的精確度會(huì)直接影響該方法的準(zhǔn)確性。交流穩(wěn)態(tài)法的測(cè)量步驟相對(duì)繁瑣
2023-03-13 10:48:462 步進(jìn)電機(jī)通過(guò)組合特定旋轉(zhuǎn)角度的小“步進(jìn)”,無(wú)需編碼器的幫助,即可提供精確的位置控制。然而,它們?cè)诓襟E之間表現(xiàn)出微小的振動(dòng)。雖然大多數(shù)時(shí)候振動(dòng)是無(wú)法觀察到的,但振動(dòng)確實(shí)會(huì)轉(zhuǎn)化為噪音,這種噪音可能會(huì)通過(guò)連接到電機(jī)的其他機(jī)制被放大。在嘗試解決問(wèn)題之前了解振動(dòng)的來(lái)源非常重要。
2023-03-13 16:10:061393 
步進(jìn)電機(jī)噪聲和振動(dòng)來(lái)源
步進(jìn)電機(jī)有一個(gè)缺點(diǎn)就是噪音比較大,特別是在低速的時(shí)候。震動(dòng)主要來(lái)自兩個(gè)方面,一是步進(jìn)電機(jī)的步距分辨率(步距階躍);另一方面是來(lái)自斬波和脈寬調(diào)制(PWM)的不良模式反應(yīng)
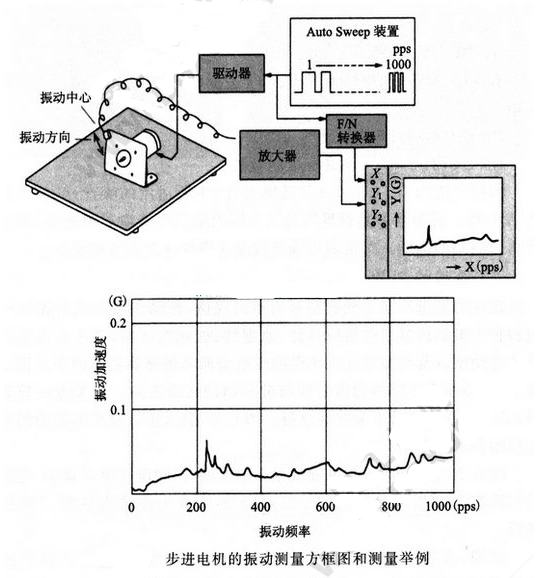
2023-03-22 11:03:160 為了評(píng)估步進(jìn)電機(jī)的特性必須要有必要的測(cè)量方法。本章針對(duì)步進(jìn)電機(jī)的基本特性①靜態(tài)特性:靜態(tài)轉(zhuǎn)矩特性,步進(jìn)角度精度;②動(dòng)態(tài)特性:速度-轉(zhuǎn)矩特性;③暫態(tài)特件;介紹各種測(cè)量方法。并且進(jìn)一步
說(shuō)明引起步進(jìn)電機(jī)產(chǎn)生振動(dòng)和噪音的原因,以及振動(dòng)和噪音的測(cè)量方法。
2023-03-23 10:00:441 內(nèi)部電子的運(yùn)動(dòng)方向和速度發(fā)生改變,使電阻值發(fā)生微小變化。微變電阻用于測(cè)量微小的力、壓力、應(yīng)變、振動(dòng)等物理量,因其響應(yīng)快、靈敏度高、體積小等優(yōu)點(diǎn),廣泛應(yīng)用于精密測(cè)量和自動(dòng)控制等領(lǐng)域。 微小電阻測(cè)量方法 為了保證
2023-08-24 14:48:19882 電阻是電路中常見的基本元件,其測(cè)量方法主要有以下幾種:直流電橋法、直流電壓比較法、萬(wàn)用表測(cè)量法、數(shù)字多用表測(cè)量法、數(shù)字電橋法、示波器法、恢復(fù)法等。下面將詳細(xì)介紹這些測(cè)量方法。 直流電橋法是一種經(jīng)典
2024-01-14 14:52:02683 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18318 步進(jìn)電機(jī)正反轉(zhuǎn)的換線方法 步進(jìn)電機(jī)是一種常見的電機(jī)類型,它具有正反轉(zhuǎn)的能力。換線是指改變步進(jìn)電機(jī)的電源連接方式,以改變其運(yùn)動(dòng)方向。換線方法有很多種,下面將詳細(xì)介紹其中一種常見的換線方法。 步進(jìn)電機(jī)
2024-01-23 14:45:51663
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論