28335步進(jìn)電機(jī)驅(qū)動(dòng)主函數(shù)源代碼#include"DSP2833x_Device.h"#include"DSP2833x_Examples.h"
2021-07-08 06:47:13
28BYJ-48步進(jìn)電機(jī)空載耗電在50mA以下,帶64倍減速器,輸出力矩比較大,可以驅(qū)動(dòng)重負(fù)載,極適合開發(fā)板使用。注意:此款步進(jìn)電動(dòng)機(jī)帶有64倍減速器,與不帶減速器的步進(jìn)電機(jī)相比,轉(zhuǎn)速顯得較慢,為
2021-07-08 06:23:41
`大家有沒有用過35步進(jìn)電機(jī)?這個(gè)步進(jìn)電機(jī)是兩相四線的。我試了一下用ULN2003驅(qū)動(dòng),但是沒有現(xiàn)象,不知道是我程序的問題還是驅(qū)動(dòng)的問題。請問能不能用ULN2003驅(qū)動(dòng)?或者還有其他的驅(qū)動(dòng)方式么?`
2014-03-20 23:31:34
42步進(jìn)電機(jī)常用有哪些驅(qū)動(dòng)模塊,各有什么差異
2023-10-15 11:03:11
51單片機(jī)驅(qū)動(dòng)42步進(jìn)電機(jī)程序,單方向轉(zhuǎn)tBB6600+42步進(jìn)電機(jī)電機(jī),共陽極接法。這里用的是進(jìn)定時(shí)器直接取反脈沖端以達(dá)到轉(zhuǎn)起來的目的。要改變速度只需改變定時(shí)器定時(shí)時(shí)間長短即可,改變方向更改DIR
2021-07-08 08:31:38
57HSXXXXEIS 一體化步進(jìn)伺服驅(qū)動(dòng)電機(jī)用戶手冊 一、概述57HSXXXXEIS一體化步進(jìn)伺服驅(qū)動(dòng)電機(jī)把步進(jìn)伺服驅(qū)動(dòng)器集成到步進(jìn)電機(jī)電機(jī)中,二者完美融為一體。本一體化步進(jìn)伺服驅(qū)動(dòng)電機(jī)在數(shù)字步進(jìn)
2021-06-28 07:06:40
01步進(jìn)電機(jī)驅(qū)動(dòng)控制器步進(jìn)電機(jī)驅(qū)動(dòng)器作為實(shí)驗(yàn)裝置可控的部分,能夠提供自動(dòng)測量的方法。前面已經(jīng)有兩款步進(jìn)電機(jī)驅(qū)動(dòng)器:SH-20403AXIS12雙軸藍(lán)牙移動(dòng)框架基于ESP8266WiFi步進(jìn)電機(jī)控制
2021-08-31 08:32:52
我設(shè)計(jì)了個(gè)通過步進(jìn)電機(jī)驅(qū)動(dòng)器控制步進(jìn)電機(jī)的電路。 電路圖如下: 右邊的PFF,DRF,MFF來自單片機(jī)STM32F767。通過74LVC4245轉(zhuǎn)成5V。左邊是和步進(jìn)電機(jī)驅(qū)動(dòng)器的接口。 可是接上電機(jī)
2018-10-19 09:43:10
步進(jìn)電機(jī)的基本參數(shù)有哪些?步進(jìn)電機(jī)驅(qū)動(dòng)器的特點(diǎn)有哪些?步進(jìn)電機(jī)和伺服電機(jī)有哪些不同之處?
2021-09-26 06:28:50
精度的,當(dāng)驅(qū)動(dòng)器設(shè)置為60000個(gè)脈沖/轉(zhuǎn)的時(shí)候,步進(jìn)電機(jī)驅(qū)動(dòng)器接受好幾個(gè)脈沖,步進(jìn)電機(jī)才走一步,這樣并不能提高步進(jìn)電機(jī)的精度。 步進(jìn)電機(jī)的細(xì)分技術(shù)實(shí)質(zhì)上是一種電子阻尼技術(shù),其主要目的是減弱或消除
2020-06-25 08:00:00
進(jìn)電機(jī)為什么要加驅(qū)動(dòng)器?步進(jìn)驅(qū)動(dòng)器和PLC之間如何連接?步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置細(xì)分時(shí)要注意的事項(xiàng)有哪些?
2021-10-28 06:28:15
步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)試方法,測試2MD542和TB6560步進(jìn)電機(jī)驅(qū)動(dòng)器:共同點(diǎn):1.ENA/EN(使能信號):此輸入信號用于使能、禁止,高電平(+5V)使能,低電平時(shí)驅(qū)動(dòng)器不能工作,一般情況下可不接
2021-07-08 08:45:46
上一篇博文簡介了一下步進(jìn)電機(jī)控制程序的配置和思路。這一篇就介紹步進(jìn)電機(jī)驅(qū)動(dòng)器的簡介以及使用方法。這里我們以TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器為例,進(jìn)行介紹。其他型號的驅(qū)動(dòng)器也大同小異。如圖是我們使用的步進(jìn)
2021-06-29 09:01:06
據(jù)實(shí)際使用,挑選了五款步進(jìn)電機(jī)的驅(qū)動(dòng)芯片:實(shí)際情況:驅(qū)動(dòng)電機(jī)為 57步進(jìn)和43步進(jìn)。額定電壓24V,額定電流約為 1.7A。用到細(xì)分?jǐn)?shù)為128 及 16細(xì)分。電機(jī)使用頻繁,實(shí)測 運(yùn)行一段時(shí)間后溫度有
2021-08-31 07:05:46
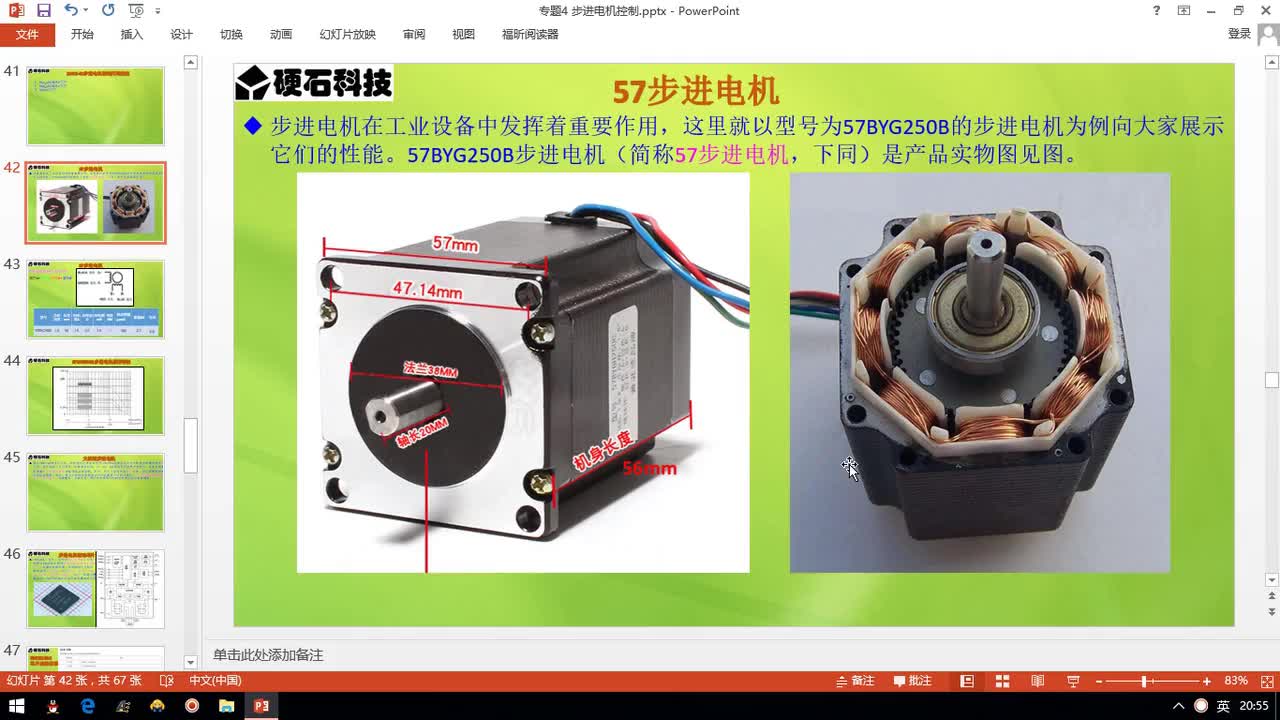
首先步距角的概念,θ=360度/(轉(zhuǎn)子齒數(shù)*運(yùn)行拍數(shù))常規(guī)的兩相步進(jìn)電機(jī)步距角1.8°,三相1.2°,四相0.9°;一個(gè)步距角對應(yīng)一個(gè)脈沖,也就是說接收到一個(gè)脈沖,旋轉(zhuǎn)一個(gè)步距角。以57步進(jìn)電機(jī)
2021-07-08 08:54:11
A4988步進(jìn)電機(jī)驅(qū)動(dòng)板常見問題有哪些?步進(jìn)電機(jī)與直流電機(jī)控制小車的差異是什么?
2021-10-19 07:35:28
A4988步進(jìn)電機(jī)驅(qū)動(dòng)器是控制步進(jìn)電機(jī)運(yùn)動(dòng)的關(guān)鍵組件。通過控制驅(qū)動(dòng)電機(jī)線圈的電流,它可以實(shí)現(xiàn)精確和受控的運(yùn)動(dòng)。其簡單的界面和易于集成使其成為從3D打印機(jī)到機(jī)器人的廣泛應(yīng)用的熱門選擇。步進(jìn)電機(jī)通常
2023-03-10 09:26:06
A4988如何驅(qū)動(dòng)42步進(jìn)電機(jī)?
2021-10-20 07:53:57
1. 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。 當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號,它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角。 2. 您可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的
2021-06-29 09:14:34
本文嘗試用Arduino開發(fā)版控制42步進(jìn)電機(jī),搭配通用的步進(jìn)電機(jī)驅(qū)動(dòng)器,實(shí)現(xiàn)對步進(jìn)電機(jī)的轉(zhuǎn)速控制和方向控制。原材料:Arduino開發(fā)板及附件42步進(jìn)電機(jī)和配套驅(qū)動(dòng)器電源接線方式:共陰總覽2、42
2021-06-29 08:22:38
原文地址::http://www.360doc.com/content/15/0902/19/12109864_496523089.shtml相關(guān)文章1、DM420步進(jìn)電機(jī)驅(qū)動(dòng)器----http://szsps.cn/product/detail/23.html
2021-07-08 08:32:54
希望能利用LabVIEW控制步進(jìn)電機(jī),電機(jī)是57貫通式直線絲桿步進(jìn)電機(jī)57BYGH301T8,配合有相關(guān)的驅(qū)動(dòng)器HST-884A。其實(shí)控制很簡單。不過現(xiàn)在得弄出一個(gè)勻加速跟勻減速的起步和停止,這個(gè)不清楚怎么實(shí)現(xiàn)。希望各位來幫忙一下 謝謝!
2014-10-14 11:15:57
如圖為M415步進(jìn)電機(jī)驅(qū)動(dòng)器Signal端PUL為脈沖輸入信號。DIR方向輸入信號,用于改變電機(jī)運(yùn)轉(zhuǎn)方向;ENA為使能信號,用于使能或禁止驅(qū)動(dòng)器輸出;OPTO為脈沖、方向、使能信號電源正端,接5v
2022-01-06 07:51:28
57BYG250B步進(jìn)電機(jī)參數(shù)(重點(diǎn)關(guān)注其接線方式)SR4驅(qū)動(dòng)器驅(qū)動(dòng)器與步進(jìn)電機(jī)接線方式:V+~V-接24V電源驅(qū)動(dòng)器與arduino控制板接線方式:STEP+DIR+分別接arduino板的兩個(gè)
2021-08-31 09:24:40
STM32+ULN2003驅(qū)動(dòng)28BYJ4步進(jìn)電機(jī)的硬件有哪些?STM32+ULN2003驅(qū)動(dòng)28BYJ4步進(jìn)電機(jī)的驅(qū)動(dòng)代碼是什么?
2021-06-29 08:53:53
用STM32控制步進(jìn)電機(jī)驅(qū)動(dòng)器,驅(qū)動(dòng)器再給步進(jìn)電機(jī)分配脈沖 發(fā)現(xiàn)電機(jī)速度一直上不去 最快只有300轉(zhuǎn)每分鐘,把脈沖頻率一加大電機(jī)就嗡嗡響 不轉(zhuǎn)求大神幫幫忙
2015-03-11 11:29:01
STM32F767+TB6600+57步進(jìn)電機(jī)的知識點(diǎn)分享,絕對實(shí)用
2021-12-21 06:10:27
很實(shí)用的TB6560步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)資料
2016-06-22 12:13:05
`ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序`
2013-07-10 16:59:38
ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)電路
2013-09-05 14:28:03
`[labview(USB6009采集卡) 驅(qū)動(dòng) 42步進(jìn)電機(jī)(含驅(qū)動(dòng)器)]提問:1、現(xiàn)在手上有一個(gè)Ni的USB6009的采集板卡,一個(gè)42步進(jìn)電機(jī)+對應(yīng)的步進(jìn)電機(jī)驅(qū)動(dòng)器2、現(xiàn)在想問怎么用Labview 驅(qū)動(dòng)步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)?誠求有人指導(dǎo)一下,1738388008@ qq.com,有償報(bào)答`
2020-11-09 10:10:52
stm32控制28步進(jìn)電機(jī)本次案例是通過按鈕啟動(dòng)電機(jī),由光電傳感器控制電機(jī)停止。很粗糙的接線圖電機(jī)驅(qū)動(dòng)器端口說明:光電傳感器說明:其中光電傳感器的黑色信號線輸出電壓>3.3V,所以需要接一個(gè)分壓電阻。模型:謝謝...
2021-07-08 06:28:53
tb6600步進(jìn)電機(jī)驅(qū)動(dòng)器說明書,Arduino控制42 步進(jìn)電機(jī) 串口控制旋轉(zhuǎn)位置1)描述42步進(jìn)電機(jī)的驅(qū)動(dòng)方式有多種,例如用A4988步進(jìn)電機(jī)模塊,這次我們使用TB6600驅(qū)動(dòng)器驅(qū)動(dòng)一個(gè)42步進(jìn)
2021-07-08 09:42:03
步進(jìn)電機(jī)的連接自行根據(jù)電機(jī)和驅(qū)動(dòng)器標(biāo)識連接,驅(qū)動(dòng)器需要一個(gè)24V 5A的直流電源供電。本例程可以選擇使用RS232或者RS485通信控制電機(jī)旋轉(zhuǎn),默認(rèn)使用USART2為通信接口,根據(jù)需要接線。使用開發(fā)板
2016-08-29 08:52:47
nema17步進(jìn)電機(jī):42mm雙極電機(jī)長度:22mm軸:直徑5mm 長度18mm額定電流:0.8A每相保持轉(zhuǎn)矩:120mN.m 2.NEMA23淘寶鏈接: 究其科技 NEMA23 57步進(jìn)電機(jī)超薄步進(jìn)電機(jī)軸長10mmNEMA23主要特性:兩.
2021-07-08 06:54:32
摘要: 1、何為步進(jìn)電機(jī)和步進(jìn)驅(qū)動(dòng)器? 步進(jìn)電機(jī)是一種與專門用于速度和位置精確控制的特種電機(jī),它旋轉(zhuǎn)是以固定的角度(稱為“步距角” )一步一步運(yùn)行的,故稱步進(jìn)電機(jī)。其特點(diǎn)是沒有累積誤差,接收
2021-08-31 08:23:29
A4988步進(jìn)電機(jī)驅(qū)動(dòng)器的控制模式有哪幾種?使用A4988步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些注意事項(xiàng)?
2021-12-20 06:46:04
使用Arduino和A4988步進(jìn)驅(qū)動(dòng)器模塊控制NEMA 17步進(jìn)電機(jī)ARDUINO項(xiàng)目經(jīng)過**阿什什·喬杜里(Ashish Choudhary)** 2019年9月10日修改用Arduino和電位計(jì)控制NEMA 17步進(jìn)電機(jī)步進(jìn)電機(jī)是一...
2021-07-08 07:37:47
步進(jìn)電機(jī)使用應(yīng)注意事項(xiàng)在人類的生產(chǎn)和生活進(jìn)入電氣化過程中,人們對電機(jī)應(yīng)用要求也越來越高。而步進(jìn)電機(jī)被廣泛運(yùn)用在需要高定位精度、高分解能、高響應(yīng)性、信賴性等靈活控制性高的機(jī)械系統(tǒng)中。在使用步進(jìn)電機(jī)
2015-12-29 10:38:38
此文章來源于融創(chuàng)芯城(www.digiic.com)—— 半導(dǎo)體電子領(lǐng)域共享平臺(tái)3D打印機(jī)驅(qū)動(dòng)板基于STM32微控制器和STSPIN L6474步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì);電路設(shè)有多個(gè)軸(6個(gè)電機(jī))、多臺(tái)
2018-05-30 17:08:56
如何使用步進(jìn)電機(jī)驅(qū)動(dòng)器?
2021-10-20 07:48:33
如何使用Arduino開發(fā)板和DRV8825步進(jìn)模塊控制NEMA17步進(jìn)電機(jī)?
2021-10-28 07:06:54
如何使用ULN2003驅(qū)動(dòng)28BYJ-48步進(jìn)電機(jī)?
2021-10-18 06:24:09
一、57步進(jìn)電機(jī)參數(shù)二、樹莓派利用python控制57步進(jìn)電機(jī)import RPi.GPIO as GPIOimport time# w1,w2,w3,w4,w5,w6
2021-07-07 08:05:23
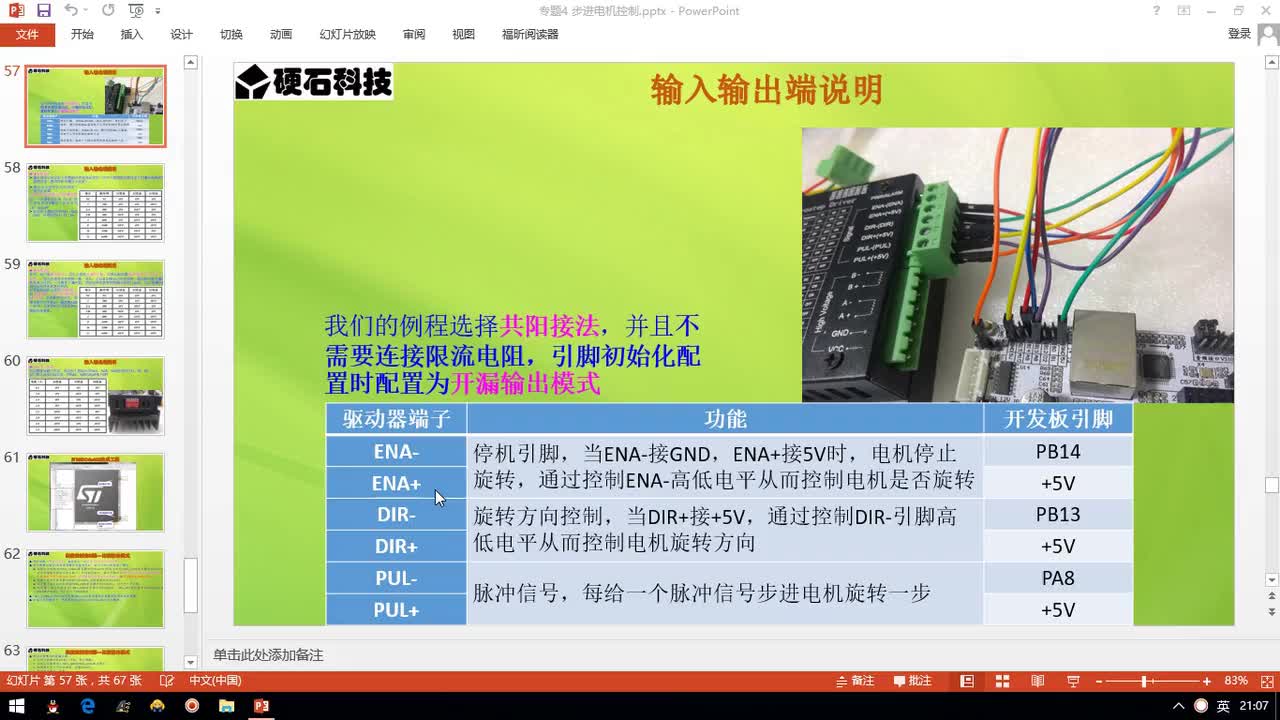
一、硬件1.硬件準(zhǔn)備:57步進(jìn)電機(jī)和驅(qū)動(dòng)器2.連線驅(qū)動(dòng)器右邊分有兩個(gè)區(qū)域Signal:用于驅(qū)動(dòng)器與開發(fā)板連接,進(jìn)行電機(jī)的控制驅(qū)動(dòng)。ENA接口:當(dāng)此信號有效時(shí),驅(qū)動(dòng)器將自動(dòng)切斷電機(jī)繞組電流,使電機(jī)處于
2021-07-07 07:53:37
控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖信號,電機(jī)所轉(zhuǎn)動(dòng)的角度。電機(jī)出廠時(shí)給出了一個(gè)步距角的值,如SS2304A42A型57步進(jìn)電機(jī)給出的值為0.9°/1.8°(表示半步工作時(shí)為0.9°、整步工作時(shí)為1.8°),這個(gè)步距角可以稱之為‘電機(jī)固有步距角’,它不一定是電機(jī)工作時(shí)的實(shí)際步距角,實(shí)際步距角和驅(qū)動(dòng)器有關(guān)。
2016-01-19 09:10:22
VID6606步進(jìn)電機(jī)是什么?VID6606步進(jìn)電機(jī)的功能和特點(diǎn)有哪些?如何用AVR單片機(jī)控制VID6606步進(jìn)電機(jī)去驅(qū)動(dòng)VID29?
2021-09-22 07:48:25
富士伺服驅(qū)動(dòng)器FALDIC的安全注意事項(xiàng)有哪些?
2021-11-02 07:12:09
小白求助,求步進(jìn)電機(jī)驅(qū)動(dòng)器轉(zhuǎn)動(dòng)一圈400步程序
2021-10-18 07:17:21
想用普中開發(fā)板測試57步進(jìn)電機(jī),用的是TB6600驅(qū)動(dòng)器。驅(qū)動(dòng)器接上外接電源后,電機(jī)可以鎖死。但是接到開發(fā)板上時(shí),步進(jìn)電機(jī)完全沒有反應(yīng)(最簡單的高低電平信號)。請問大神有什么解決方法嗎?
2018-03-20 11:10:41
,樓主自行購買了28步進(jìn)電機(jī)及相應(yīng)的驅(qū)動(dòng)器,完成了對步進(jìn)電機(jī)的控制。硬件設(shè)備:樹莓派3B 28步進(jìn)電機(jī)及其驅(qū)動(dòng) 12V開關(guān)電源...
2021-07-08 07:39:40
步進(jìn)電機(jī)驅(qū)動(dòng)器的電壓如何確定?怎樣去計(jì)算步進(jìn)電機(jī)驅(qū)動(dòng)器的電流?
2021-09-28 06:15:50
本帖最后由 eehome 于 2013-1-5 10:07 編輯
木工雕刻機(jī)中步進(jìn)電機(jī)驅(qū)動(dòng)器選型注意事項(xiàng)如下: <br/><br/>第一
2010-06-08 16:07:15
一、簡介使用樹莓派控制57步進(jìn)電機(jī)。二、硬件設(shè)備57兩相四線步進(jìn)電機(jī) ×1DM542驅(qū)動(dòng)器 ×1樹莓派 ×13.3V-5V電平轉(zhuǎn)換 ×124V / 36V電源 ×1三孔帶插頭單頭裸尾電源線 ×1需要
2021-06-30 07:03:00
目標(biāo):用步進(jìn)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)42步進(jìn)電機(jī),并精確控制脈沖個(gè)數(shù)。步進(jìn)電機(jī)器如下圖:第一步 STM32CubeMX配置TIM2_CH1,并生成代碼。TIM2的NVIC也要打開,如圖:第二步 :在生成的代碼
2021-09-16 06:02:55
本帖最后由 eehome 于 2013-1-5 10:09 編輯
用L6219驅(qū)動(dòng)57補(bǔ)進(jìn)電機(jī),運(yùn)行時(shí)吱吱聲比較大!!停止時(shí)很安靜。。想問一下的是步進(jìn)電機(jī)的吱吱聲,有那幾個(gè)主要方面引起的?怎么避免或者說減少這種噪聲,
2012-09-28 11:02:19
用stm32怎么控制4線57步進(jìn)電機(jī)?
2014-04-10 16:50:42
我使用57步進(jìn)電機(jī),最高電流可達(dá)2.4A,電壓24v。使用我自己寫的驅(qū)動(dòng)程序,最高可達(dá)600轉(zhuǎn)()使用通用的驅(qū)動(dòng)器最高可達(dá)300(因?yàn)樽畹图?xì)分400,我給驅(qū)動(dòng)器的脈沖為40um,再低就會(huì)堵轉(zhuǎn))我看到有的說想要提高轉(zhuǎn)速需要寫增減速程序,是和增減速有關(guān)嗎?
2015-06-04 09:01:26
請問51單片機(jī)如何控制TB6600驅(qū)動(dòng)器驅(qū)動(dòng)42步進(jìn)電機(jī)?
2021-10-15 07:24:18
請問stm32步進(jìn)電機(jī)如何驅(qū)動(dòng)S加速雷塞驅(qū)動(dòng)器?
2021-10-28 06:58:04
tb6600步進(jìn)電機(jī)驅(qū)動(dòng)器對步進(jìn)電機(jī)的脈沖寬度的影響?
2021-10-28 06:41:36
這兩個(gè)驅(qū)動(dòng)器能驅(qū)動(dòng)42,57步進(jìn)電機(jī)嗎?電壓、電流大概是24V、2.5A
2016-12-21 09:29:08
項(xiàng)目目標(biāo)是驅(qū)動(dòng)一個(gè)濾波片輪的步進(jìn)電機(jī)。首先用網(wǎng)上購買的一個(gè)電機(jī)驅(qū)動(dòng)器和配套電機(jī)進(jìn)行調(diào)試。調(diào)試HT57DJ100電機(jī)和 TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器套件
2021-07-09 06:00:43
)/*********************************************************************************硬石YS-F1Pro開發(fā)板例程功能說明**例程名稱: YSF1_HAL_MOTOR-004. 57&42步進(jìn)電機(jī)基本旋轉(zhuǎn)實(shí)現(xiàn)
2016-08-27 12:41:42
)/*********************************************************************************硬石YS-F1Pro開發(fā)板例程功能說明**例程名稱: YSF1_HAL_MOTOR-005. 57&42步進(jìn)電機(jī)旋轉(zhuǎn)控制實(shí)現(xiàn)
2016-08-28 15:25:12
)/*********************************************************************************硬石YS-F1Pro開發(fā)板例程功能說明**例程名稱: YSF1_HAL_MOTOR-006. 四軸57&42步進(jìn)電機(jī)旋轉(zhuǎn)控制實(shí)現(xiàn)
2016-08-28 15:27:32
概述:一款即支持S/D脈沖控制,又支持RS485總線控制,體積小巧,主要用以42步進(jìn)電機(jī)的驅(qū)動(dòng)控制器。參數(shù):電壓:9-28V電流:1.4A微步細(xì)分:256內(nèi)插細(xì)分只支持RS485、S/D脈沖控制
2022-09-26 17:56:35
MOTEC 步進(jìn)電機(jī)及驅(qū)動(dòng)器:德國MOTEC公司多年以來一直致力于步進(jìn)電機(jī)及驅(qū)動(dòng)器的研究、開發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動(dòng)系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:59 55
55 在51單片機(jī)上,57步進(jìn)電機(jī)結(jié)合鍵盤的使用。按鍵的不同,電機(jī)執(zhí)行不同模式。
2016-05-18 14:26:2939 電機(jī)驅(qū)動(dòng)器的型號:? ? ? ?七特步進(jìn)電機(jī)驅(qū)動(dòng)器型號 調(diào)速步進(jìn)電機(jī)驅(qū)動(dòng)器(57 型調(diào)速:7TPSM5725) Indexer 接口步進(jìn)電機(jī)驅(qū)動(dòng)器(57 型脈沖:7TPSM5720) CAN
2018-11-21 15:32:40 1426
1426 本文主要闡述了步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)速方法及步進(jìn)電機(jī)驅(qū)動(dòng)器的作用。
2020-04-20 09:10:2810074 步進(jìn)電機(jī)驅(qū)動(dòng)器都支持細(xì)分功能,即實(shí)現(xiàn)很小的步進(jìn)角,控制更精確。但是步進(jìn)電機(jī)不適合使用在長時(shí)間同方向運(yùn)轉(zhuǎn)的情況下,容易燒壞產(chǎn)品。即,通常在短距離頻繁動(dòng)作時(shí)使用較佳。 步進(jìn)電機(jī)溫度過高會(huì)使電機(jī)的磁性材料
2020-05-24 10:09:59833 步進(jìn)電機(jī)具體有很多不同的類型品種及規(guī)格型號,不論是不同類型品種的電機(jī),還是不同規(guī)格型號的電機(jī),都必然存在一定的區(qū)別。比如42電機(jī)和57電機(jī)之前就有著下面這樣的區(qū)別,具體選用哪個(gè)型號的電機(jī),用戶要根據(jù)實(shí)際情況及需求來具體確定。
2021-08-31 16:23:5020574 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種電子設(shè)備,用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)和運(yùn)動(dòng),其主要原理是將控制信號轉(zhuǎn)換為電機(jī)的驅(qū)動(dòng)信號。
2023-03-08 14:30:532613 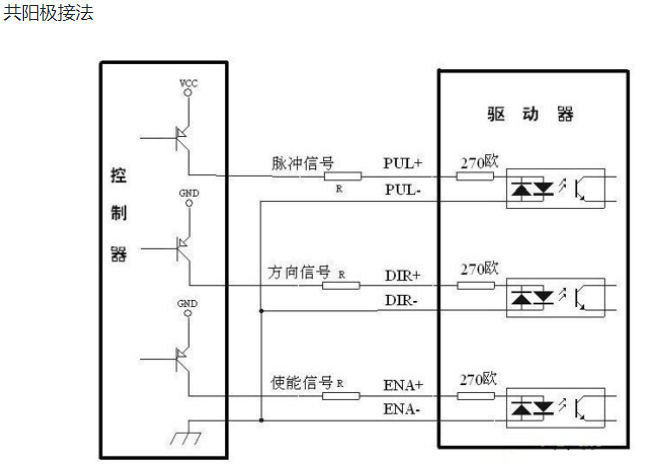
步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼 步進(jìn)電機(jī)驅(qū)動(dòng)器(step driver)是指一類用于控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的電子設(shè)備,它一般采用撥碼開關(guān)來設(shè)定步進(jìn)電機(jī)驅(qū)動(dòng)器的參數(shù),以實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。 此驅(qū)動(dòng)器采用交流伺服驅(qū)動(dòng)器
2023-03-14 14:03:434020 又稱脈沖電動(dòng)機(jī)。
42/57/86步進(jìn)電機(jī)區(qū)別:
①42步進(jìn)電機(jī)是指安裝座尺寸是42mm的步進(jìn)電機(jī),其最大輸出力矩是0.5NM.
②57步進(jìn)電機(jī)是指安裝座尺寸是57mm的步進(jìn)電機(jī),其最大輸出力矩是3.0NM.
③86步進(jìn)電機(jī)是指安裝座尺寸是86mm的步進(jìn)電機(jī),其
2023-03-16 09:56:521 一、硬件 1.硬件準(zhǔn)備 57步進(jìn)電機(jī)(型號57CM18),驅(qū)動(dòng)器TB6600,開發(fā)板STM32F407ZGT6 2.電氣特性 ? 3.連線 驅(qū)動(dòng)器右邊分有兩個(gè)區(qū)域 Signal:用于驅(qū)動(dòng)器與開發(fā)板
2023-03-20 14:16:524 ,驅(qū)動(dòng)器價(jià)格昂貴,一般一些特殊場景才會(huì)使用。 1. 為什么叫20283539425786步進(jìn)電機(jī)?看圖說話最好使,所謂57就是指的電機(jī)的端蓋外形尺寸是57mm的正方形(不同電
2023-03-21 15:22:014 電流都是1A以上的,一般用專用的步進(jìn)電機(jī)驅(qū)動(dòng)器。用得最多,最常見的是兩相4線步進(jìn)電機(jī),步距角為1.8°,即旋轉(zhuǎn)一圈需要200個(gè)脈沖。 (360/1.8 = 200)
2023-03-22 11:21:011 SSD2608PC 步進(jìn)電機(jī)驅(qū)動(dòng)器控制 開環(huán)57兩相步進(jìn)電機(jī)CanOpen通訊 測試硬件倍福CX5130+EL6751 CANOPEN主站模塊 研控步進(jìn)電機(jī)驅(qū)動(dòng)器 SSD2608PC(閉環(huán)式步進(jìn)電機(jī)
2023-03-23 14:21:500 TI大功率電機(jī)驅(qū)動(dòng)器應(yīng)用的系統(tǒng)設(shè)計(jì)注意事項(xiàng)
2023-08-08 15:48:090 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號,它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,這個(gè)固定的角度被稱為“步距角”。步進(jìn)電機(jī)不能直接接到直流或交流電
2023-11-14 08:07:32928 
測速電機(jī): 常見6大注意事項(xiàng)!測速電機(jī)是一種用于測量物體運(yùn)動(dòng)速度的設(shè)備,廣泛應(yīng)用于工業(yè)生產(chǎn)和科學(xué)研究中。測速電機(jī)常見的6大注意事項(xiàng)以確保安全和準(zhǔn)確性。
2024-01-11 10:53:36120 
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見的電機(jī)驅(qū)動(dòng)裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器的撥碼開關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個(gè)詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開關(guān)
2024-01-15 13:56:45738
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論