2015-08-13 19:39:59 9
9 DM365中,連接OVT2715 CMOS 傳感器,請問OV2715傳感器芯片的輸入像素時鐘用不用和DM365的時鐘同源????可以用FPGA或晶振產生一個時鐘(和DM365的時鐘沒有相位關系,即不同源的時鐘)作為OV2715的像素輸入時鐘嗎????
2018-06-21 19:17:33
MTK-sensor驅動與調試小結
2017-03-19 11:47:147 升壓變流器的幾點調試經驗
2022-11-02 08:16:050 KEIL 調試方法,但是到底該怎么使用這些方法呢?這篇文章將介紹個人的調試經驗。
2022-02-10 11:42:59 3161
3161 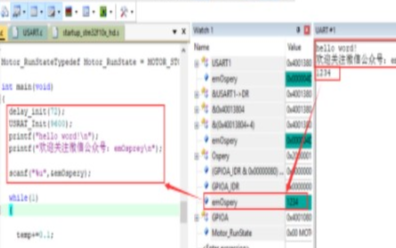
KEIL調試方法,到底該怎么使用這些方法呢?這篇文章將介紹個人的調試經驗。
2020-09-21 09:58:175463 
程序調試經驗 for 瑞薩R7F0C004
2021-10-25 13:51:0712 PID算法原理、調試經驗以及代碼資料
2021-11-21 10:25:3314 本例介紹了CMOS傳感器仿真工作流,其中包括三維寬帶光學和電學仿真,與前面的案例(Lumerical 針對 CMOS image sensor 仿真中的角度響應)相比,提供了一個更真實和通用的演示。本例考慮了入射光的方位角和極化角,必要時可以提取EQE用于SPEOS中進一步模擬。
2022-12-20 14:04:29644 適用于TI mmWave sensor的CCS在線調試腳本上手指南
2022-10-28 11:59:490 PID算法原理_調試經驗以及代碼總結分享。
2021-05-25 15:59:4616 28335的一些調試經驗
2016-12-13 22:20:4816 ADSD3100: 1 MP, CMOS, Time of Flight, Backside Illumination Sensor Preliminary Data Sheet
2021-01-27 23:03:278 本文分享foc電機控制算法的調試經驗,針對的場景是往一套新的控制板卡上移植一套電機控制軟件。
具體調試過程是 發波=>電流反饋=>環路=>角度
2023-01-31 17:12:341327 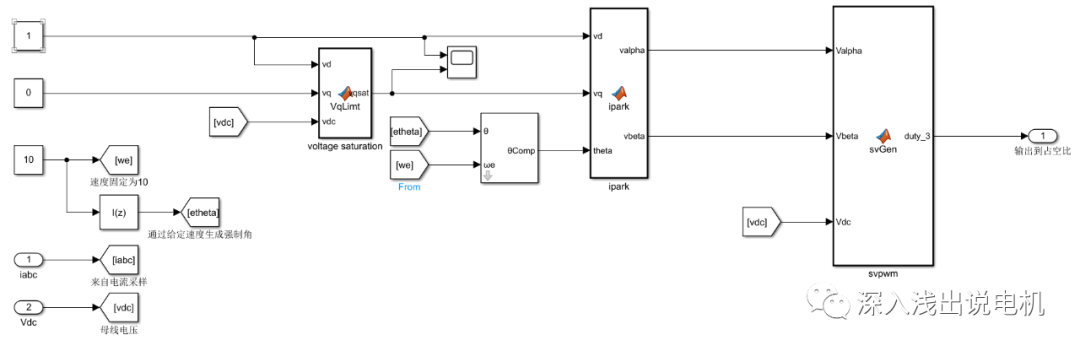
Aptina CMOS sensor MT9V126倒車影像方案
MT9V126 是Aptina 針對車載倒車影像市場推出的高靈敏度CMOS sensor產品,其主要特性:內部集成overlay(on chip)功能;Lens Dis
2009-11-11 17:01:212464 Aptina推出采用MT9M114 CMOS sensor行車紀錄器方案
行車紀錄器于歐美國家甚至日本皆已被廣泛應用,富威集團結合旗下代理產線Aptina因應趨勢推出采用CMOS sensor MT9M114行車紀
2010-09-30 10:40:252996 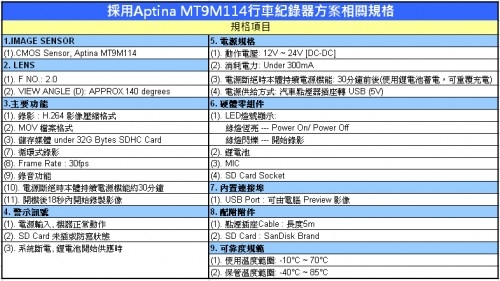
OPT3101工廠校準指南與調試經驗
2022-10-28 12:00:263 PID算法原理、調試經驗以及代碼,感興趣的發燒友們可以看一看。
2016-08-09 16:09:3525 關于調試 MPU6050 DMP初始化過不去 總是顯示mpu_set_sensor complete 的解決辦法
2021-12-06 14:36:1316 ADXL345使用方法和調試經驗定算法綜述
2021-09-12 09:35:5523 音箱調試小經驗:充放電過程的長短與充放電回路的時間常數T=RC的大小有關,—般認為(3-5)r,充放電基本結束。RC電路在生產生活中構一泛用于延時等自控場合。
2009-12-03 08:35:0980 本文分享foc電機控制算法的調試經驗,針對的場景是往一套新的控制板卡上移植一套電機控制軟件。
具體調試過程是 發波=>電流反饋=>環路=>角度
將調試過程分解為以下步驟。
2023-04-20 16:20:201267 導致IC不正常工作問題,例如啟動異常,輸出電壓不穩定,紋波過大甚至IC損壞等等。大部分時候,引起IC異常工作的原因并不復雜,簡單的調試可以快速地定位并解決問題。這篇文章介紹幾點針對升壓變流器的調試經驗。
2023-04-08 09:42:09386 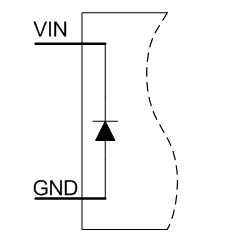
最近,我回顧了我所有的194個條目(從13歲開始),看看有什么經驗教訓是我可以學習的。下面是我總結的最重要的經驗教訓,包括編碼,測試和調試三個方面。
2016-07-17 22:41:591922 Dragon Board410c Audio 調試經驗(1)概述,我上傳了很多相關資料,感興趣的可以去我上傳的資料里看看哈。
2016-06-30 15:03:042 Dragon Board410c Audio 調試經驗(2)概述,我上傳了很多相關資料,感興趣的可以去我上傳的資料里看看哈。
2016-06-30 15:03:042 嵌入式開發過程中的一點調試經驗嵌入式開發最麻煩的在現場調試過程中或實際運營過程中出現問題很難定位。我在實際開發過程中一點經驗分享給大家嵌入式開發調試分為開發階段調試,現場調試,運行調試以STM32為
2021-11-02 18:06:0315 作者十年來做過小的嵌入式系統,大的電信系統以及基于web的系統。使用過C ++,Ruby,Java和Python等。這篇文章中的經驗教訓旨在幫助減少編碼,測試和調試三個階段的bug。
2019-01-01 09:03:002742 PFC在電路中的作用是體現電力的利用率,此項系數反映著電路性能的好壞。因此很多設計者對于PFC的調試都非常重視,在本文中小編將對電源達人的經驗進行總結,給出一種單級PFC的調試心得,其中包含了很多
2022-02-11 14:56:5315 本文檔的主要內容詳細介紹的是使用51單片機進行無源蜂鳴器調試的經驗免費下載。
2019-06-21 17:43:001 我們已經了解了很多的 KEIL 調試方法,但是到底該怎么使用這些方法呢?這篇文章將介紹個人的調試經驗。 虛擬串口 首先是虛擬串口,為什么要虛擬串口,這里的虛擬串口又是什么意思? 在線仿真的時候我們
2021-09-02 10:29:019704 
CM3220 is an advanced ambient light sensor that uses the analog CMOS process and offers a
2011-05-01 08:28:1666 JX 720P CMOS SENSOR Datasheet
2017-10-30 17:18:0963 CMOS圖像傳感器的像素結構目前主要有無源像素圖像傳感器(Passive Pixel Sensor,PPS)和有源像素圖像傳感器(Active Pixel Sensor,APS)兩種.
2019-10-11 15:18:134027 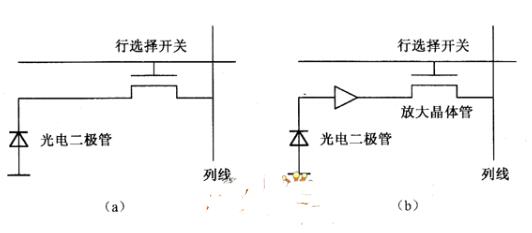
Overview of sensor signal paths
This tutorial explains the sensor signal chain for the most
2010-05-13 08:07:041125 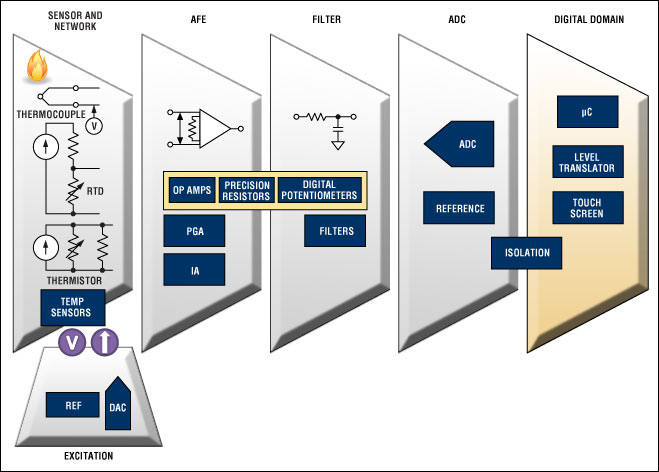
Isolated Temperature Sensor
Abstract: This application note presents a novel circuit
2009-09-18 08:37:08847 
今天跟大家分享的內容很重要,也是調試FPGA經驗的總結。隨著FPGA對時序和性能的要求越來越高,高頻率、大位寬的設計越來越多。在調試這些FPGA樣機時,需要從寫代碼時就要小心謹慎,否則寫出來的代碼
2023-08-01 09:18:34699 
, IWR6843作者:Wesley He
TI mmWave sensor毫米波雷達傳感器是高集成度的毫米波雷達傳感SOC,將中射頻電路,VCO,ADC,DSP 和硬件加速器集成在單顆芯片內,它具有
2022-06-30 17:01:302445 本文以一電路結構下文分析目前各廠碰到的情況,與本人在電路設計方面經驗與心得
2011-02-17 15:50:25115 電子發燒友網為你提供幾個關于升壓變流器的調試經驗資料下載的電子資料下載,更有其他相關的電路圖、源代碼、課件教程、中文資料、英文資料、參考設計、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-26 08:46:399 工程師跨度13年、回顧194個bug總結的18條編碼、測試和調試經驗教訓。
2018-02-27 16:50:17830 這份文檔是生花通信的一線射頻工程師總結了的Wi-Fi 產品開發過程中的一些射頻調試經驗,記錄并描述在實際項目開發中遇到并解決問題的過程。
2016-06-14 14:13:2633 這份文檔是生花通信的一線射頻工程師總結了的Wi-Fi產品開發過程中的一些射頻調試經驗,記錄并描述在實際項目開發中遇到并解決問題的過程。
2011-03-28 21:29:2916740 
本文檔的主要內容詳細介紹的是CMOS圖像傳感器的基礎知識詳細資料說明包括了:1.Sensor 結構,2.Sensor Interface,3.IIC協議,4.Sensor 模塊流程,5.Sensor ISP 算法介紹,6.Sensor 分辨率,7.色彩空間,8.Sensor 應用
2019-03-28 08:00:008 對于一個新設計的電路板,調試起來往往會遇到一些困難,特別是當板比較大、元件比較多時,往往無從下手。但如果掌握好一套合理的調試方法,調試起來將會事半功倍。
2016-12-12 14:19:37929 pulse sensor原理圖
2017-04-07 15:40:26370 對于一個新設計的電路板,調試起來往往會遇到一些困難,特別是當板比較大、元件比較多時,往往無從下手。但如果掌握好一套合理的調試方法,調試起來將會事半功倍。
2016-11-26 14:29:482008 調試人員在調試時發現的問題,都應及時聯系有關設計人員,在設計人員同意后方可進行修改,修改需做詳細的記錄,修改后的軟件要進行備份。并對調試修改部分做好文檔的整理和歸檔。調試內容主要包括輸入輸出功能、控制邏輯功能、通信功能、處理器性能測試等。
2023-08-02 14:38:3688 Smart Motor Sensor
2021-01-28 12:48:206 capacitive humidity sensor
2009-11-30 16:37:0810 CM3317 Color Sensor (RGB Sensor, RGBS) is a highly integrated design for a RGB light sensing
2011-05-01 08:33:03110 這份文檔總結了我工作一年半以來的一些射頻(Radio Frequency)調試(以下稱為Debug)經驗,記錄的是我在實際項目開發中遇到并解決問題的過程。現在我想利用這份文檔與大家分享這些經驗,如果
2017-11-23 16:36:33279 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論