直流電機(jī)的單向控制 直流電機(jī)的單向控制較為簡單,可以通過開關(guān)的通斷來接通和斷開直流電源,實(shí)現(xiàn)電機(jī)的啟動與停止控制,開關(guān)控制直流電機(jī)如圖9-2所示。也可以通過三極管、場效應(yīng)管、繼電器等對直流電機(jī)的通斷
2023-04-03 11:41:21 2
2 實(shí)驗(yàn)名稱:直流電機(jī)實(shí)驗(yàn)
接線說明:
實(shí)驗(yàn)現(xiàn)象:下載程序后,直流電機(jī)旋轉(zhuǎn)5S后停止
注意事項(xiàng):將直流電機(jī)兩根線分別連接到“步進(jìn)電機(jī)模塊”輸出端子J47的5V和O1上
2023-04-03 11:18:120 一、實(shí)驗(yàn)?zāi)康募耙?
熟悉繼電器控制直流電機(jī)的用法。
二、實(shí)驗(yàn)原理與內(nèi)容
1.完成使用繼電器控制直流電機(jī)功能。
2.通過按鍵控制繼電器,實(shí)現(xiàn)按鍵控制直流電機(jī)功能。
三、實(shí)驗(yàn)軟硬件環(huán)境
硬件
2023-04-03 11:01:533 前言:在成功通過arduino開發(fā)板控制直流電機(jī)后,開始嘗試用ros與arduino通信來控制直流電機(jī),為無人小車作準(zhǔn)備
硬件 arduino開發(fā)板、杜邦線、直流電機(jī)、L298N電機(jī)驅(qū)動板 板子的連接參考我之前寫的博客:L298N電機(jī)驅(qū)動器和Arduino板來控制直流電機(jī)
2023-03-31 11:45:231 實(shí)驗(yàn)內(nèi)容:
1. 基于pid的直流電機(jī)調(diào)速伺服控制
2. 基于模糊控制的直流電機(jī)調(diào)速伺服控制
3. 基于bp神經(jīng)網(wǎng)絡(luò)的直流電機(jī)調(diào)速伺服控制
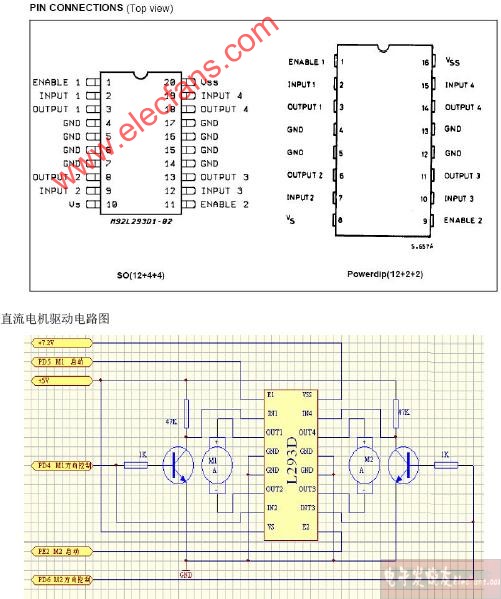
2023-03-31 11:40:321 直流電機(jī)屬于大功率器件,GPIO無法直接驅(qū)動,需要電機(jī)驅(qū)動模塊配合,才能驅(qū)動直流電機(jī). TB6612可以驅(qū)動2個直流電機(jī)。由IN1,IN2控制電機(jī)旋轉(zhuǎn)方向,由PWM控制電機(jī)旋轉(zhuǎn)速度。核心代碼還是為
2023-03-31 10:02:054 直流電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置。一般的直流電機(jī)有兩個電極,當(dāng)電極正接時,電機(jī)正轉(zhuǎn),當(dāng)電極反接時,電機(jī)反轉(zhuǎn)。直流電機(jī)主要由永磁體(定子)、線圈(轉(zhuǎn)子)和換向器組成。除直
流電機(jī)外,常見的電機(jī)還有步進(jìn)電機(jī)、舵機(jī)、無刷電機(jī)、空心杯電機(jī)等。
2023-03-30 14:14:220 有刷直流電機(jī)的工作原理及控制電路 引言 入題 1.定子 2. 轉(zhuǎn)子 3. 電刷與換向器 微型有刷直流電機(jī)的類型 1. 微型永磁體有刷直流電機(jī) 2. 并激有刷直流電機(jī) 3. 串激有刷直流電機(jī) 4. 復(fù)
2023-03-30 14:11:397 直流電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置。一般的直流電機(jī)有兩個電極,當(dāng)電極正接時,電機(jī)正轉(zhuǎn),當(dāng)電極反接時,電機(jī)反
轉(zhuǎn)
直流電機(jī)主要由永磁體(定子)、線圈(轉(zhuǎn)子)和換向器組成
除直流電機(jī)外,常見的電機(jī)還有步進(jìn)電機(jī)、舵機(jī)、無刷電機(jī)、空心杯電機(jī)等
2023-03-30 14:09:072 Matlab 仿真——直流電機(jī)速度控制(1)直流電機(jī)建模 TMotor上位機(jī)軟件的控制算法,其中KT就是“直流電機(jī)扭力與電流成正比”的那個正比,是電機(jī)固有參數(shù),不需要調(diào)。 另外這里的Kd是相較Pdes來說的,其實(shí)是Vdes的P,Pdes和Vdes經(jīng)過系數(shù)后給出的都是Tdes(期望力矩)。
2023-03-30 13:52:331 這一期我們來學(xué)習(xí)如何控制直流電機(jī)。
需要材料:Arduino UNO
直流電機(jī)——本文以12V額定電機(jī)為例
電機(jī)驅(qū)動——本文以L298N為例
直流電機(jī)顧名思意,即可以將直流電轉(zhuǎn)化成機(jī)械能
2023-03-30 13:46:111 直流電機(jī)是一種將電能轉(zhuǎn)換為機(jī)械能的裝置。一般的直流電機(jī)有兩個電極,當(dāng)電極正接時,電機(jī)正轉(zhuǎn),當(dāng)電極反接時,電機(jī)反轉(zhuǎn)
直流電機(jī)主要由永磁體(定子)、線圈(轉(zhuǎn)子)和換向器組成
除直流電機(jī)外,常見的電機(jī)還有步進(jìn)電機(jī)、舵機(jī)、無刷電機(jī)、空心杯電機(jī)等
2023-03-30 11:36:101 直流電機(jī)是指能將直流電能轉(zhuǎn)換成機(jī)械能(直流電動機(jī))或?qū)C(jī)械能轉(zhuǎn)換成直流電能(直流發(fā)電機(jī))的旋轉(zhuǎn)電機(jī)。它是能實(shí)現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī)。當(dāng)它作電動機(jī)運(yùn)行時是直流電動機(jī),將
電能轉(zhuǎn)換為機(jī)械能
2023-03-30 10:45:480 直流電機(jī)是一種最基本的電動機(jī)類型之一,其速度和方向可以通過控制電流來實(shí)現(xiàn)。直流電機(jī)常常作為工業(yè)控制系統(tǒng)的主要組成部分,其他領(lǐng)域也廣泛應(yīng)用。
直流電機(jī)控制的基本方法包括以下幾種:
2023-03-26 22:21:58 2442
2442 無刷直流電機(jī)和有刷直流電機(jī)是兩種不同類型的直流電機(jī)。
2023-03-17 18:20:543555 直流電機(jī)的基本組成 直流電機(jī)的主要缺點(diǎn) 直流電機(jī)的四種勵磁方式
2023-03-15 18:25:141299 無刷直流電機(jī)與有刷電機(jī)在外形、形狀上長著十分的相似,不仔細(xì)區(qū)分的話,很有可能出亂子。那么,如何從外觀上區(qū)別是無刷直流電機(jī)還是有刷直流電機(jī)呢?小編教你以下幾招: ?無刷直流電機(jī)區(qū)別方式一:看外觀,通常
2023-03-08 14:51:506 無刷直流電機(jī)是指具有串勵直流電機(jī)起動特性和并勵直流電機(jī)調(diào)速特性的梯形波/方波直流電機(jī)。
基本結(jié)構(gòu)由電機(jī)本體、功率驅(qū)動電路以及位置傳感器組成。無刷直流電機(jī)為實(shí)現(xiàn)無機(jī)械接觸式換相,取消了電刷。并將電樞
2023-03-08 11:37:311 STM32 HAL 驅(qū)動有刷直流電機(jī)和無刷直流電機(jī) (有刷)直流電機(jī)和無刷直流電機(jī)的機(jī)電結(jié)構(gòu)不同,(有刷)直流電機(jī)通過兩根線供電,由這兩根線的電壓方向控制電機(jī)軸轉(zhuǎn)動的方向,調(diào)節(jié)額定范圍內(nèi)的電壓可控制
2023-03-08 11:34:2113 無刷直流電機(jī)控制系統(tǒng) 無刷直流電機(jī)(BLDC)又被稱為電子換向電機(jī),相比傳統(tǒng)有刷電機(jī),其內(nèi)部轉(zhuǎn)子由電線繞組改為永磁體,碳刷由電子換向器取代,外部直流電通過電子換向器產(chǎn)生交流電,進(jìn)而驅(qū)動電機(jī)。伴隨著
2023-03-06 14:02:48694 為了避免直流電機(jī)損壞和安全問題,不要將直流電機(jī)直接接入交流電。如果需要將直流電機(jī)接入交流電路,可以通過使用電子器件,如橋式整流器或交流電機(jī)驅(qū)動器等,將交流電轉(zhuǎn)換為直流電,以便為直流電機(jī)提供穩(wěn)定的電源。
2023-03-02 10:52:574016 雖然市場上的電機(jī)大都是以交流電機(jī)為主,這是由于交流電機(jī)的結(jié)構(gòu)簡單,加上近年來交流變頻技術(shù)的迅速發(fā)展,使得交流電機(jī)的控制變得非常方便,得到了大量的應(yīng)用,這也造成很多人開始唱衰直流電機(jī),但直流電機(jī)在某些特定領(lǐng)域是非常有用的,所以如何選擇直流電機(jī)?
2023-03-02 10:45:091042 測量直流電機(jī)好壞通常可以采用以下幾種方法:
電阻測量法:將萬用表調(diào)至電阻檔位,分別測量直流電機(jī)兩端子之間的電阻值,如果電阻值為零或者是無窮大,說明直流電機(jī)可能損壞了。
2023-03-01 15:20:0220133 直流電機(jī)是一種將直流電能轉(zhuǎn)換為機(jī)械能的電動機(jī)。直流電機(jī)的工作原理是通過電樞和永磁體或電磁體之間的相互作用實(shí)現(xiàn)轉(zhuǎn)動。在直流電機(jī)中,電樞被放置在永磁體或電磁體的磁場中,當(dāng)電樞中通電時,它就會受到磁場的作用而旋轉(zhuǎn)。
2023-03-01 11:07:361915 在直流電機(jī)中,有有刷直流電機(jī)和無刷直流電機(jī)之分,它們之間各有各的優(yōu)點(diǎn),有刷直流電機(jī)優(yōu)點(diǎn)在于價格便宜、控制方便但轉(zhuǎn)速和壽命無法做得很高,無刷直流電機(jī)可以,但是成本高且控制較為復(fù)雜。
2022-11-07 11:50:384205 在本教程中,我們將向您展示如何使用 MATLB 和 Arduino 控制直流電機(jī)。
2022-11-03 17:18:51667 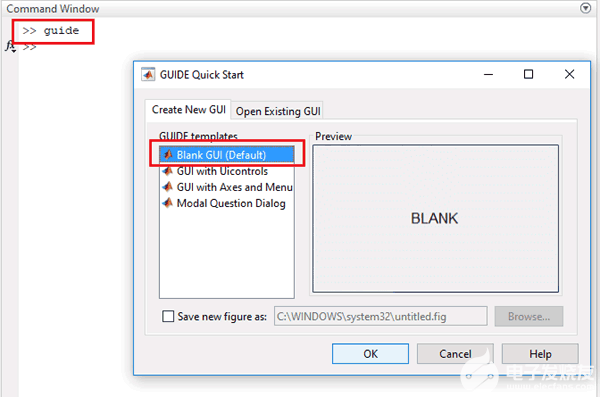
直流電機(jī)控制系統(tǒng),通過按鍵對直流電機(jī)進(jìn)行控制;可以調(diào)節(jié)直流電機(jī)的速度等級,旋轉(zhuǎn)方向,并將其顯示在LCD1602液晶顯示屏上;簡單的直流電機(jī)控制可以應(yīng)用在遙控車上,還可安裝在自制小風(fēng)扇等多種小型電器上,但此設(shè)計(jì)中直流電機(jī)控制不是很準(zhǔn)確,在一些精密直流電機(jī)控制上使用效果較差。
2022-06-30 16:01:274714 
直流電機(jī)一種用直流電運(yùn)行的電機(jī),直流電機(jī)通常是有刷的或同步的,有刷直流電機(jī)通過內(nèi)部換向、固定永磁體和旋轉(zhuǎn)的電磁鐵直接從提供給電機(jī)的直流電中產(chǎn)生轉(zhuǎn)矩。
2022-02-22 15:54:363470 在現(xiàn)代電子產(chǎn)品中,自動控制系統(tǒng),電子儀器設(shè)備、家用電器、電子玩具等等方面,直流電機(jī)都得到了廣泛的應(yīng)用。大家熟悉的錄音機(jī)、電唱機(jī)、錄相機(jī)、電子計(jì)算機(jī)等,都不能缺少直流電機(jī)。所以直流電機(jī)的控制是一門很
2022-02-10 12:09:354 直流電機(jī)是能實(shí)現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī),主要結(jié)構(gòu)由定子和轉(zhuǎn)子兩部分組成,常見種類有直流發(fā)電機(jī)和直流電動機(jī)。接下來簡單介紹一下直流電機(jī)的優(yōu)點(diǎn)與缺點(diǎn)。
2022-01-26 19:53:1219770 博士直流電機(jī)控制表資料下載
2021-12-09 15:54:243 無線電編、譯碼發(fā)射和接收遙控器1.7智能小車的直流電機(jī)控制1.8計(jì)算機(jī)與智能小車的串口通信1.9智能小車的自動尋跡實(shí)驗(yàn)1.10三自由度的機(jī)械爬蟲的運(yùn)動原理1.11附錄ICCAVR簡介1.12附錄串口調(diào)試軟件
2011-03-09 12:37:40
直流電機(jī)驅(qū)動設(shè)計(jì)(電源技術(shù)雜志評述)-?電機(jī)驅(qū)動,直流電機(jī)驅(qū)動設(shè)計(jì),包括PWM電機(jī)控制原理,MOSFET管驅(qū)動技術(shù),集成電路驅(qū)動芯片介紹
2021-09-28 14:29:07210 直流電機(jī)調(diào)速系統(tǒng)的仿真(深圳市核達(dá)中遠(yuǎn)通電源技術(shù)有限公司郵政編碼)-直流電機(jī)調(diào)速系統(tǒng)仿真,實(shí)現(xiàn)閉環(huán)直流電機(jī)調(diào)速控制
2021-09-28 12:18:11109 直流電機(jī)的原理圖(深圳市優(yōu)能電源技術(shù)有限公司)-文件內(nèi)容為直流電機(jī)的原理圖,可為直流電機(jī)使用者提供學(xué)習(xí)幫助
2021-09-28 12:05:56113 直流電機(jī)換向和調(diào)速(開關(guān)電源技術(shù)教程張占松)-利用PWM對直流電機(jī)進(jìn)行換向和調(diào)速,本程序同時控制四個電機(jī)。
2021-09-27 15:04:0441 Arduino的直流電機(jī)調(diào)速(深圳市核達(dá)中遠(yuǎn)通電源技術(shù)有限公司招聘電話)-基于Arduino的直流電機(jī)調(diào)速? ? ? ? ? ? ? ? ? ? ? ??
2021-09-18 16:12:4956 直流電機(jī)調(diào)速原理(現(xiàn)代電源技術(shù)杜少武課件)-直流電機(jī)調(diào)速原理,有需要的可以參考!
2021-09-16 09:27:0547 無刷直流電機(jī)原理(大工18秋電源技術(shù)在線作業(yè)2)-無刷直流電機(jī)原理,有需要的可以參考!
2021-09-15 16:52:1286 直流電機(jī)的電樞繞組(實(shí)用電源技術(shù)講義)-直流電機(jī)的電樞繞組,有需要的可以參考!
2021-09-15 15:57:3014 直流電機(jī)的工作原理(大工電源技術(shù)在線作業(yè)2)-直流電機(jī)的工作原理,有需要的可以參考!
2021-09-15 15:53:3954 直流電機(jī)PWM調(diào)速與控制設(shè)計(jì)報(bào)告(電源技術(shù)版面費(fèi)多少錢一頁)-直流電機(jī)PWM調(diào)速與控制設(shè)計(jì)報(bào)告,有需要的可以參考!
2021-09-15 15:34:2396 直流電機(jī)PWM控制(電源技術(shù)屬于哪個期刊)-直流電機(jī)PWM控制,有需要的可以參考!
2021-09-15 15:29:10134 無刷直流電機(jī)運(yùn)行原理與基本控制(電源技術(shù)應(yīng)用 期刊)-無刷直流電機(jī)運(yùn)行原理與基本控制方法,有需要的可以參考!
2021-09-15 14:27:4162 直流電機(jī)控制原理及C程序(通訊電源技術(shù)的組成)-直流電機(jī)控制原理及C程序,有需要的可以參考!
2021-09-15 14:08:4032 PID控制PWM調(diào)節(jié)直流電機(jī)速度(安徽理士電源技術(shù)有限公司圖片)-PID控制PWM調(diào)節(jié)直流電機(jī)速度,有需要的可以參考!
2021-09-15 14:02:1687 直流無刷電動機(jī)在交通、輪轂電機(jī)、機(jī)械、紡織、航空等領(lǐng)域中已經(jīng)得到廣泛的應(yīng)用。以往的直流無刷電動機(jī)控制只是簡單的控制,直流電機(jī)很難進(jìn)行調(diào)速,因此直流電機(jī)不能實(shí)現(xiàn)智能化。 ? 單片機(jī)控制直流電機(jī)基本原理
2021-08-07 21:33:5911190 PID控制直流電機(jī)速度(emi開關(guān)電源是什么意思)-該文檔為PID控制直流電機(jī)速度資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-07-26 12:03:4635 直流電機(jī)PID控制(固緯3030電源)-該文檔為 直流電機(jī)PID控制資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-07-26 11:55:0549 基于PID控制的直流電機(jī)調(diào)速系統(tǒng).(電源的關(guān)聯(lián))-該文檔為基于PID控制的直流電機(jī)調(diào)速系統(tǒng).資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-07-26 11:53:0059 無刷直流電機(jī)驅(qū)動控制板(直流逆變電源)-無刷直流電機(jī)驅(qū)動控制板無刷直流電機(jī)驅(qū)動控制板
2021-07-26 10:53:10137 基于PID控制的直流電機(jī)調(diào)速系統(tǒng)(電源變壓器線圈壞了)-該文檔為基于PID控制的直流電機(jī)調(diào)速系統(tǒng)講解資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-07-26 10:50:0928 直流電機(jī)的控制說明。
2021-05-19 09:45:4334 調(diào)整直流電機(jī)小車的固定速度源碼下載
2021-04-07 09:11:162 直流電機(jī)一種用直流電運(yùn)行的電機(jī),直流電機(jī)通常是有刷的或同步的,有刷直流電機(jī)通過內(nèi)部換向、固定永磁體和旋轉(zhuǎn)的電磁鐵直接從提供給電機(jī)的直流電中產(chǎn)生轉(zhuǎn)矩。
2021-01-21 09:31:0117 在電機(jī)的應(yīng)用中,微型直流電機(jī)是非常容易控制的,為什么這么說呢? 對比交流電機(jī),微型直流電機(jī)是通過直流電來供電,如電池或AC/DC電源轉(zhuǎn)換器,微型直流電機(jī)通過改變電樞的繞組中的電流就可以控制轉(zhuǎn)速了
2020-11-14 11:53:462446 本文檔的主要內(nèi)容詳細(xì)介紹的是使用51單片機(jī)控制直流電機(jī)的代碼免費(fèi)下載包括了:點(diǎn)動控制兩個直流電機(jī)正反轉(zhuǎn)電位器調(diào)速,分別控制兩個直流電機(jī)起停正反轉(zhuǎn)電位器調(diào)速,直流電機(jī)啟停正反轉(zhuǎn)調(diào)速,直流電機(jī)限位往返電位器調(diào)速。
2020-06-24 08:00:0025 若起桿時,直流電機(jī)控制器有運(yùn)轉(zhuǎn)而直流電機(jī)控制器不動作,說明平衡拉簧拉力不足,調(diào)節(jié)拉簧狀態(tài)或增加拉簧,直至直流電機(jī)控制器運(yùn)行正常。
2020-04-03 17:26:151290 我們平時使用的直流電機(jī)在進(jìn)行操控時,主要有兩種控制方式,在進(jìn)行操作時我們都要了解直流電機(jī)控制原理圖,下面就來看下。
2019-09-23 09:34:2924840 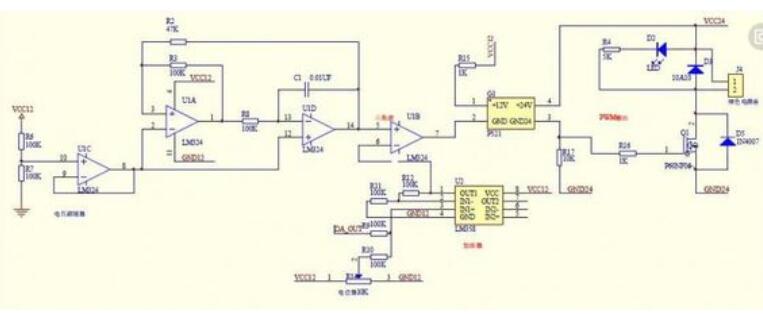
直流電機(jī)(direct current machine)是指能將直流電能轉(zhuǎn)換成機(jī)械能(直流電動機(jī))或?qū)C(jī)械能轉(zhuǎn)換成直流電能(直流發(fā)電機(jī))的旋轉(zhuǎn)電機(jī)。它是能實(shí)現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī)。本視頻主要介紹了直流電機(jī)的維護(hù)。
2018-11-18 10:13:184165 本文檔的主要內(nèi)容詳細(xì)介紹的是平衡小車直流電機(jī)驅(qū)動的介紹及如何平衡小車如何測速?資料概述
2018-09-11 18:04:4639 調(diào)頻控制的直流電機(jī)驅(qū)動電源
2017-09-14 08:43:5615 通過按鍵控制直流電機(jī)的轉(zhuǎn)動。例如:按下S7,直流電機(jī)正轉(zhuǎn);按下S3,直流電機(jī)反
轉(zhuǎn);按下S5,直流電機(jī)停止。
2017-06-23 14:38:3952 直流電機(jī):定義輸出或輸入為直流電能的旋轉(zhuǎn)電機(jī),稱為直流電機(jī),它是能實(shí)現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī)。當(dāng)它作電動機(jī)運(yùn)行時是直流電動機(jī),將電能轉(zhuǎn)換為機(jī)械能;作發(fā)電機(jī)運(yùn)行時是直流發(fā)電機(jī),將機(jī)械能轉(zhuǎn)換為電能。
2017-06-09 14:46:5013603 直流電機(jī)PWM控制設(shè)計(jì):基于VHDL語言實(shí)現(xiàn)直流電機(jī)PWM控制設(shè)計(jì),有仿真,有程序,有結(jié)論
2016-11-08 18:51:1650 直流電機(jī)速度控制,感興趣的小伙伴們可以看看。
2016-08-22 16:01:4830 用51單片機(jī)對直流電機(jī)進(jìn)行調(diào)速,可以調(diào)頻率和調(diào)占空比,可以測直流電機(jī)的速度
2016-05-23 17:03:4218 基于DSC的無刷直流電機(jī)的模糊控制-2007。
2016-04-01 17:21:1129 基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究基于Matlab/Simulink的無刷直流電機(jī)控制仿真研究
2015-12-29 10:32:50103 •直流電機(jī)的用途及基本工作原理
•直流電機(jī)的主要結(jié)構(gòu)與型號
•直流電機(jī)的磁路
•直流電機(jī)的電樞繞組
•電樞電
2010-09-26 16:35:2790 什么是直流電機(jī)
使用直流電源的電機(jī)叫做直流電機(jī)。因此只要把直流電機(jī)的端子接到直流電源上,就可以使其簡單的動轉(zhuǎn)。直流電機(jī)是一種具有優(yōu)良控制特性的電機(jī)。
2010-01-09 15:05:173458 
無刷直流電機(jī)是在有刷直流電機(jī)的基礎(chǔ)上發(fā)展起來的,它用位置傳感器代替了有刷直流電機(jī)的電刷和換向器,因此其內(nèi)部發(fā)生的電磁過程和普通的有刷直流電機(jī)類似,無刷直流電機(jī)
2009-11-02 14:15:541899 實(shí)驗(yàn) 脈寬調(diào)制器控制直流電機(jī)
一、實(shí)驗(yàn)?zāi)康?
1.學(xué)習(xí)脈寬調(diào)制控制直流電機(jī)的基本工作原理。
2009-05-08 08:37:403438 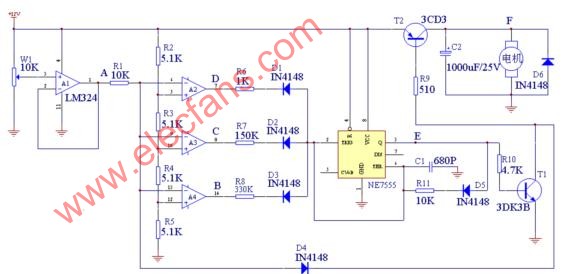
直流電機(jī)速度控制電路
2009-02-17 20:44:401114 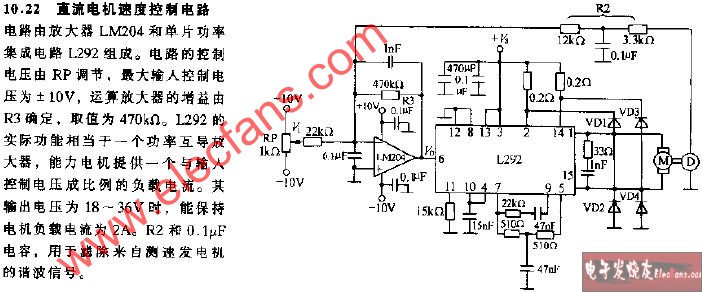
精密直流電機(jī)速度控制電路
2009-02-17 20:07:34871 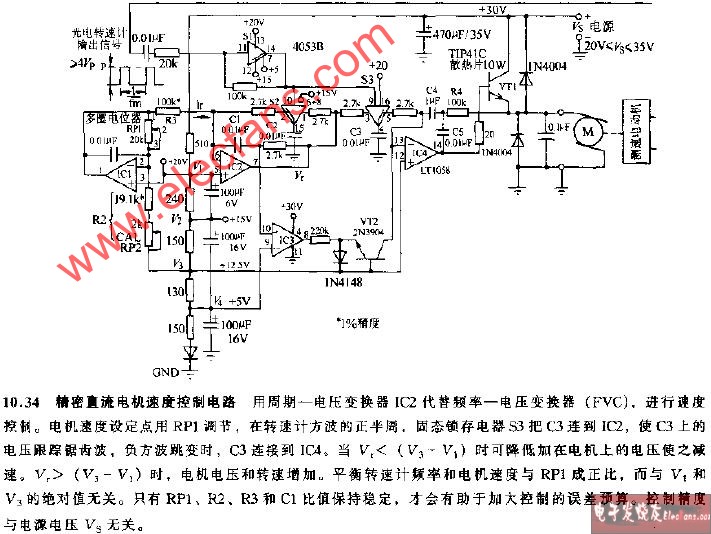
直流電機(jī)控制電路
2009-02-09 16:22:372224 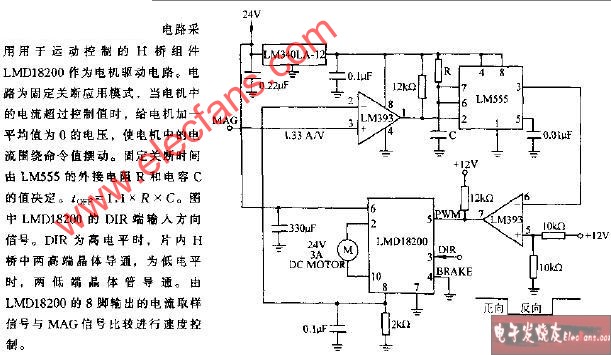
直流電機(jī)的結(jié)構(gòu)
直流電機(jī)的工作原理僅僅揭示了如何
2008-11-19 16:29:504366 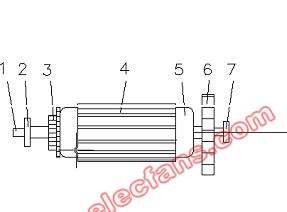
直流電機(jī)§1.1 直流電機(jī)的基本工作原理與結(jié)構(gòu) §1.1.1 直流電機(jī)的基本工作原理§1.1.2 直流電機(jī)的主要結(jié)構(gòu) 直流電機(jī)的工作原理
2008-11-19 15:14:18276 直流電機(jī)正反轉(zhuǎn)控制電路
2008-10-17 16:29:255108 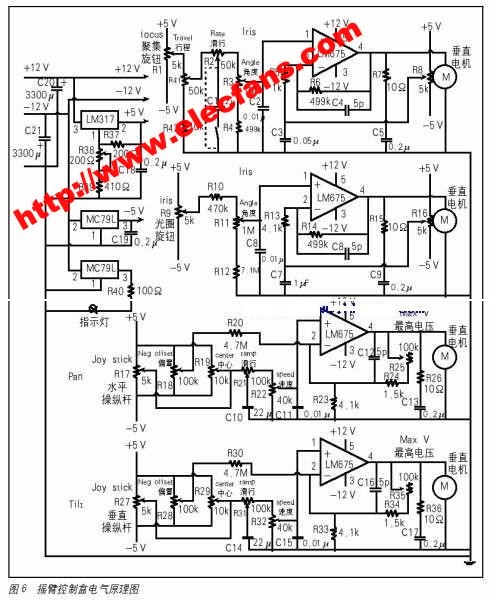
直流電機(jī)實(shí)驗(yàn)
一. 實(shí)驗(yàn)?zāi)康睦肞WM 控制直流電機(jī)的轉(zhuǎn)動速度。二. 實(shí)驗(yàn)設(shè)備及器件IBM PC 機(jī) 一臺DP-51PR
2008-09-22 17:47:483032 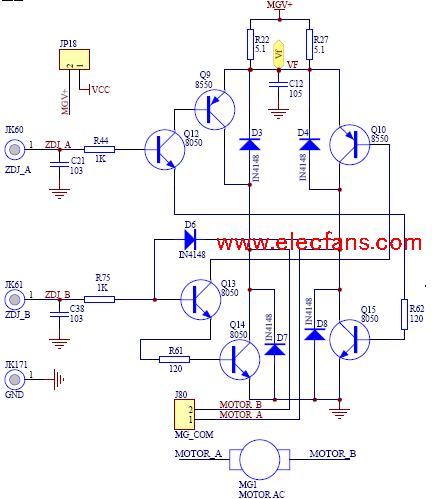
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論