 電子發(fā)燒友App
電子發(fā)燒友App


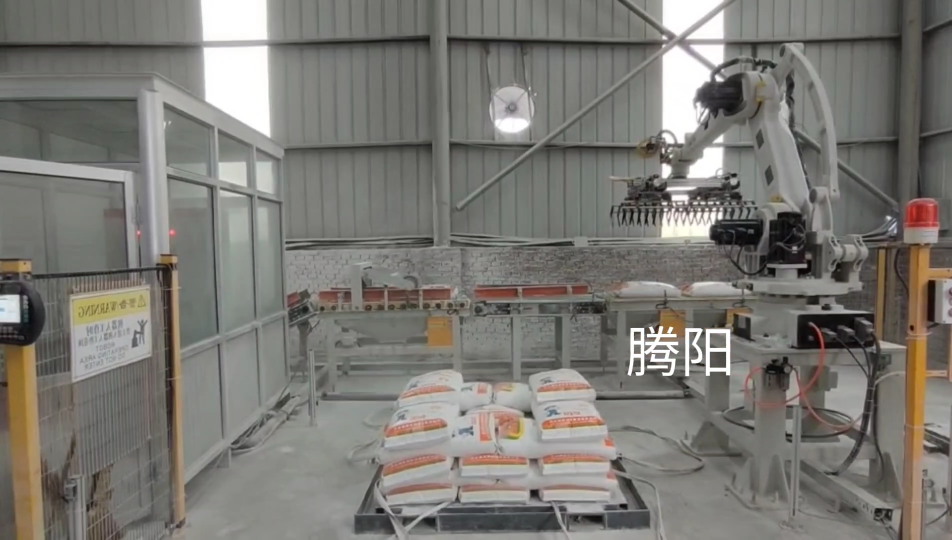
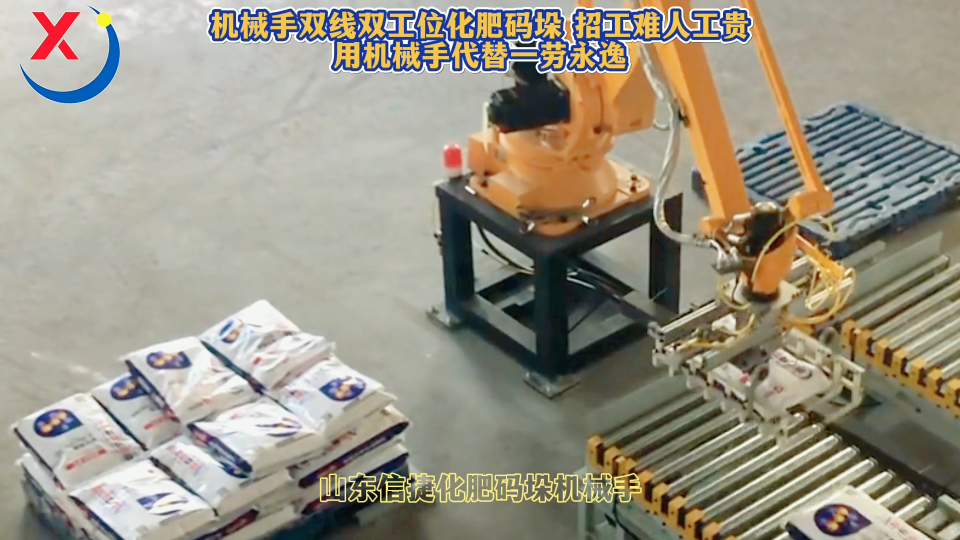
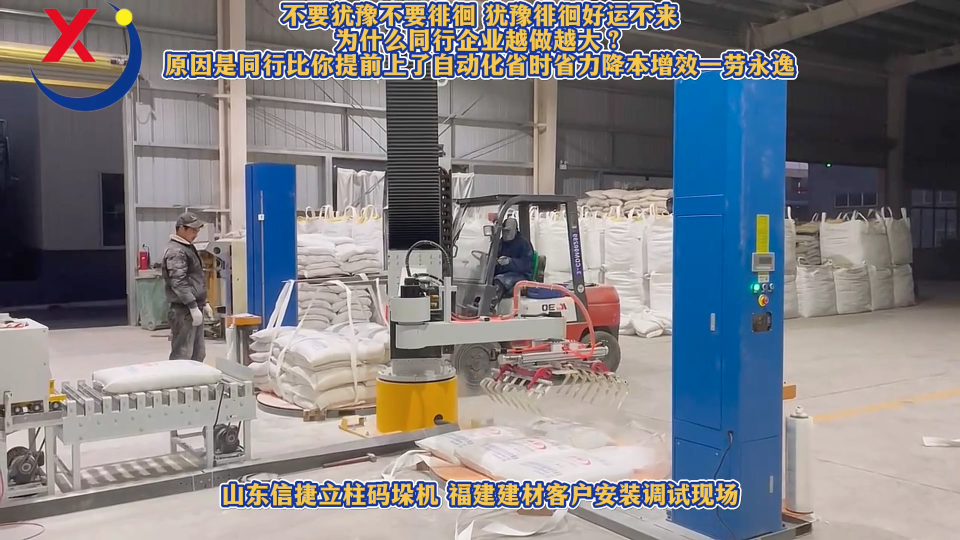
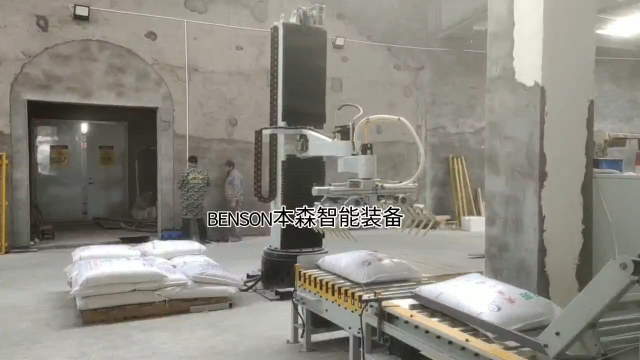
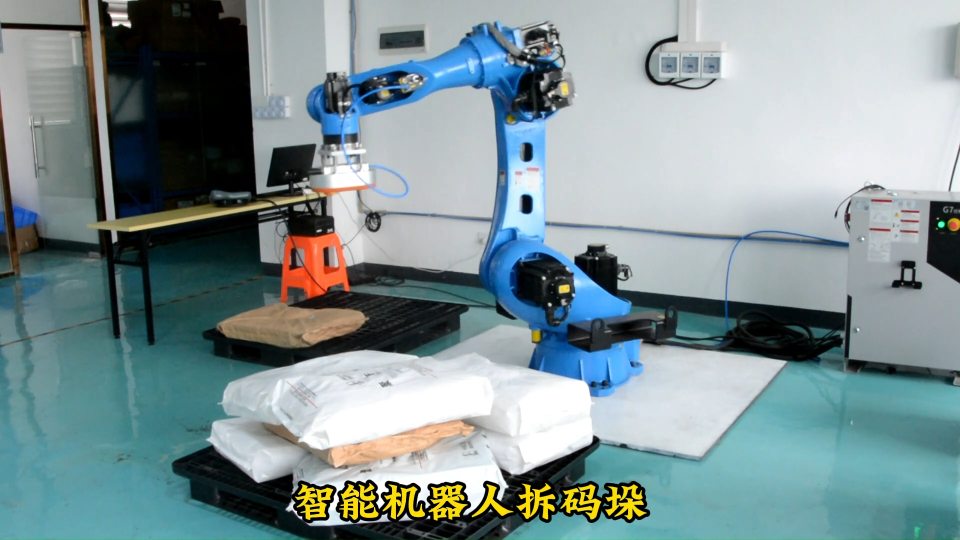
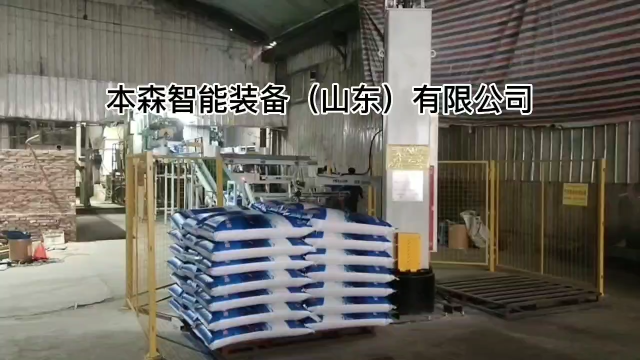
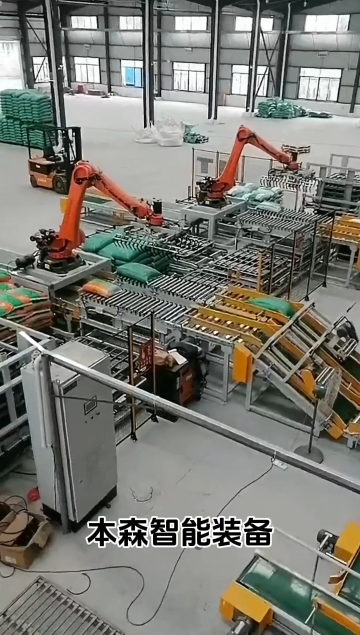
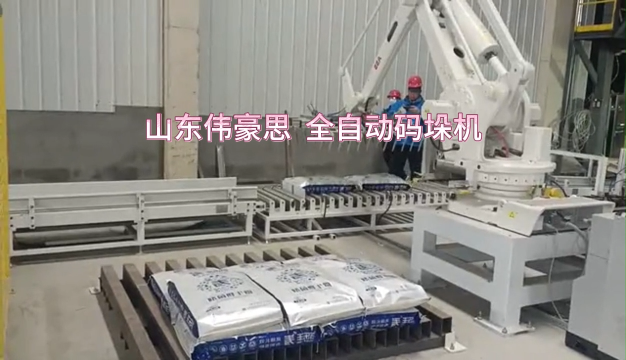
在自動化生產(chǎn)線中,由于不同產(chǎn)品采取的碼垛方式和要求有差異,隨著自動化程度地不斷提升,對產(chǎn)品的碼垛搬運程度也在不斷加強,物料的運動要求也在不斷增加。在實際工作過程中,大部分碼垛機械抓手只能實現(xiàn)一種類型工件的抓取,無法滿足高校地自動化生產(chǎn)。為了提高物料搬運效率,降低機械手開發(fā)成本,亟需一種復(fù)合型多功能抓手裝置。由埃斯頓生產(chǎn)研發(fā)的復(fù)合型抓手碼垛機器人,近日在建材行業(yè)粉狀袋裝物料碼垛作業(yè)中得到很好的應(yīng)用,下面騰陽蘇簡單介紹一下復(fù)合型抓手的特點和應(yīng)用優(yōu)勢:
1.復(fù)合型抓手裝置包括模組連接組件,模組連接組件的底部設(shè)置有抓手組件,模組連接組件上還設(shè)置有固定支架,固定支架用于與模組機械手連接,抓手組件的底部設(shè)有吸盤組件;模組連接組件的上端設(shè)有電機,電機的輸出軸豎向設(shè)置且能驅(qū)動抓手組件轉(zhuǎn)動。
2.抓手組件上設(shè)置有感應(yīng)片,感應(yīng)片用于與光電傳感器配合。
3.吸盤組件包括吸盤底座,吸盤底座上設(shè)有至少一個吸盤。
4.吸盤底座下部靠近外側(cè)設(shè)有四個互相對稱設(shè)置的吸盤。
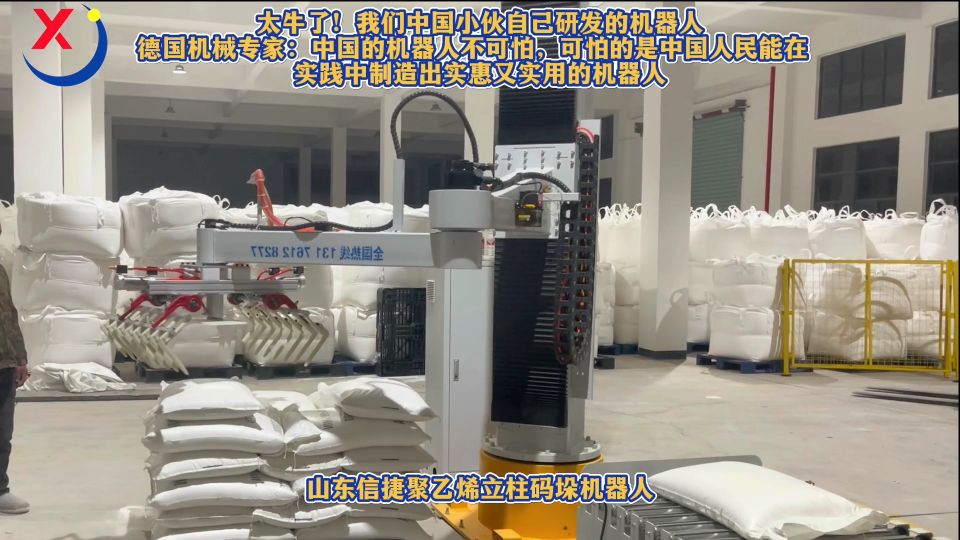
5.有效提高了機械臂的適用范圍和穩(wěn)定性
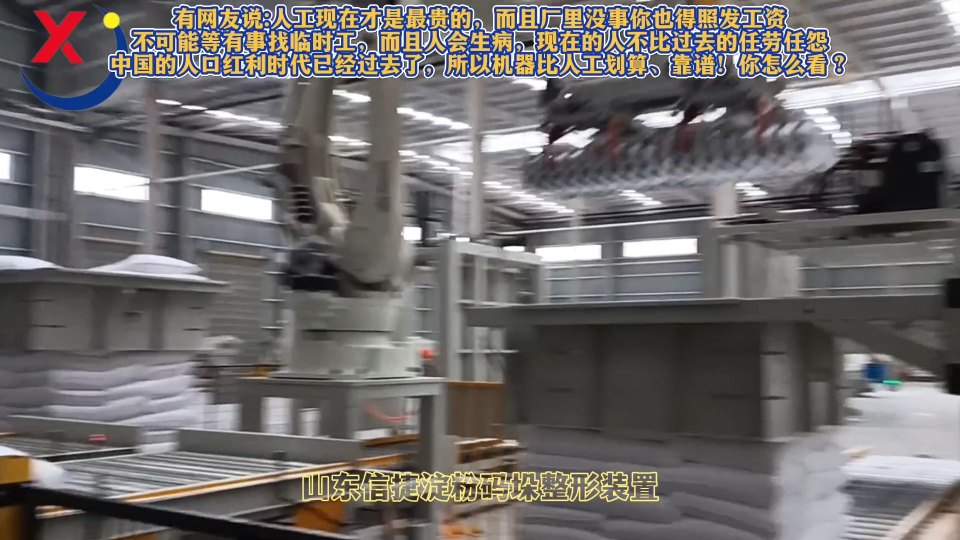
6.能夠加強對裝夾產(chǎn)品的固定強度,進一步提高機械臂的穩(wěn)定性.
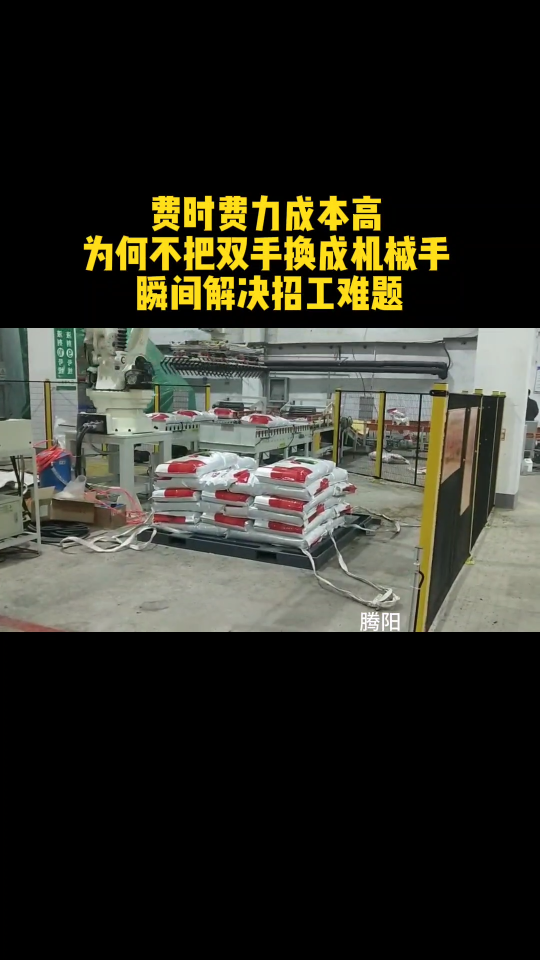
7.在袋裝物料碼垛一般用于軟托盤,使用吸盤抓手抓取軟拖盤放置于輸送線,再用夾爪式抓手抓取袋子放置于軟拖上,抓取過程更加準(zhǔn)確靈敏柔性。
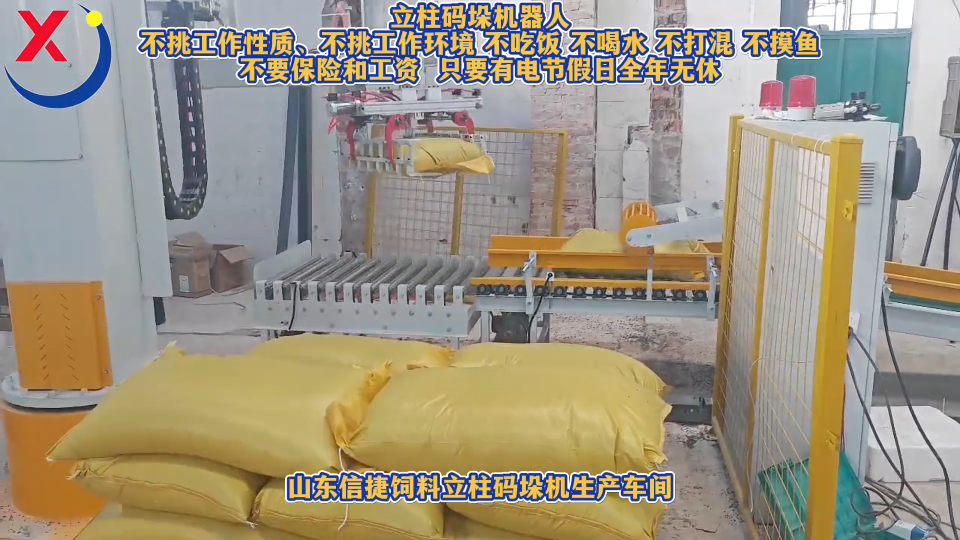
8.提高機械臂使用范圍,適用于更多更廣泛生產(chǎn)線作業(yè)。
如今,我國正處在從傳統(tǒng)工業(yè)向現(xiàn)代職能化、數(shù)字化的工業(yè)的轉(zhuǎn)型期,在工業(yè)機器人市場中,未來我國還將有著巨大的需求量,埃斯頓的未來發(fā)展很值得期待。
隨著工業(yè)自動化技術(shù)的不斷突破,智能制造要求的不斷提高,工業(yè)機器人已經(jīng)在眾多領(lǐng)域煥發(fā)光彩,下一步,騰陽將繼續(xù)探索和研發(fā),讓工業(yè)自動化設(shè)備發(fā)揮其作用,賦能產(chǎn)業(yè)升級。
? ? ? ?ymf














































































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論