 電子發燒友App
電子發燒友App


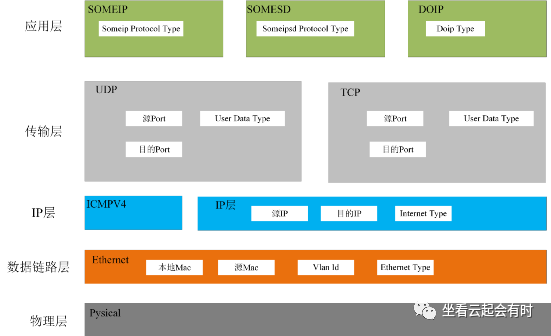
本文主要是針對車載以太網的一個基本概念介紹,包括為什么要用以太網,以太網包含哪些優勢。針對以太網的優勢,在物理鏈路層要考慮哪些基本特性,以及目前以太網有哪些組織,涉及到哪些標準。 ?
1 車載網絡技術的發展簡史
1.1 車用電子設備的不斷增加對汽車的綜合布線和信息的交互共享提出了更高的要求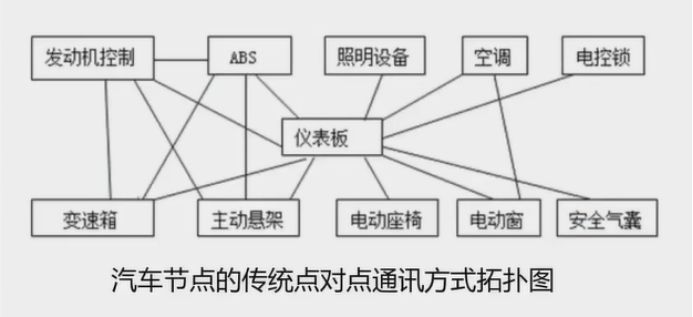
在汽車沒有上網絡之前,各個控制器之間主要通過硬線鏈接。各個控制器想要獲取對方的信息沒有相應的網絡,只能通過點對點通訊模式獲取。當所有控制器數的節點數量增加的時候,汽車所需要的硬線數量成幾何數增加,進而導致了各種問題:
布線繁亂,不易維修
增加成本和重量
信號利用率低
當車用電子設備不斷增加的時候,對汽車的綜合布線及信息交互共享提出了更高的要求。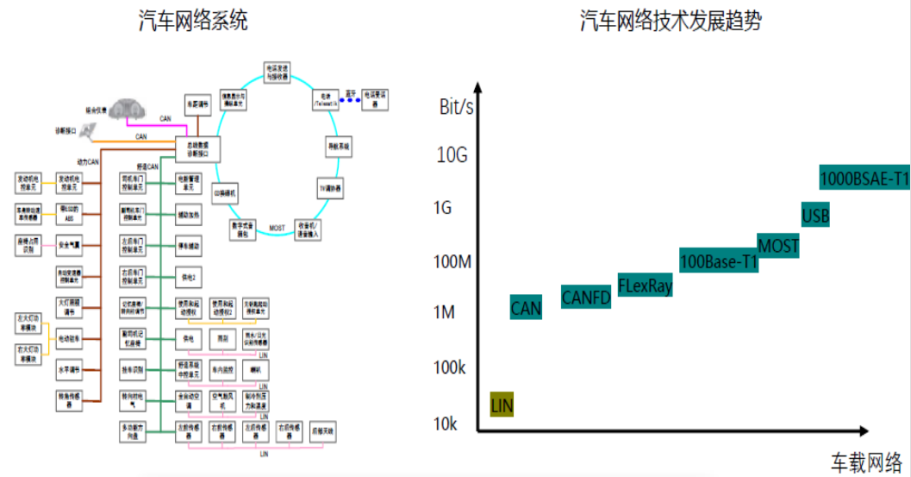
隨著汽車網絡技術的不斷發展,車載網絡系統逐步發展出CAN線,LIN線,Flexray,MOST等網絡。 最早隨著整車車用電器增多,需要有一個網絡進行共享的時候,由BOSCH提出CAN網絡的概念,CAN網絡,即整車控制器局域網。
之后出現了LIN線,LIN更多的被理解為CAN總線的一個輔助網絡,應用于在車輛不需要CAN總線的移動場合。因為LIN線是用單根線鏈接,CAN線是雙絞線,用LIN線輔助CAN線可以大大降低整車在線束的成本以及減輕線束的重量。隨著技術的延伸,進而誕生了FlexRay網絡,FlexRay可能大家有點感到陌生,它具備冗余功能,速率能達10M,目前出現在一些高檔品牌車型,比如奔馳、寶馬,主要應與底盤安全領域。
接下來就有了USB,USB也被稱作一個網絡協議,隨后慢慢開始用到MOST網絡,MOST主要應用于語音視頻。發展到現在,目前各個廠家在車輛中低速網絡開始應用CANFD網絡。隨著車輛電器的增加,比如激光雷達,角雷達,毫米波雷達的應用,車輛信息的傳輸量暴增,對網絡的要求更高,于是就有了百兆網,后面又出現1G網絡。
綜上所述,在車輛上,低速網絡,我們用CAN總線升級CANFD進行通訊;高速網絡,車載以太網將會成為智能網聯汽車的主骨干網絡。 ?
2 車載以太網應用背景
2.1 以太網的誕生 前文提到,由于車輛用電器的數量增多,對于車輛點對點的硬線模式,需要一個局域網進行網絡信號的共享。隨著車輛智能網聯化程度的加深,車用電器越來越多之后,原有的CAN, CANFD或者MOST等已經無法滿足車輛現有的需求,于是就誕生以太網這個概念。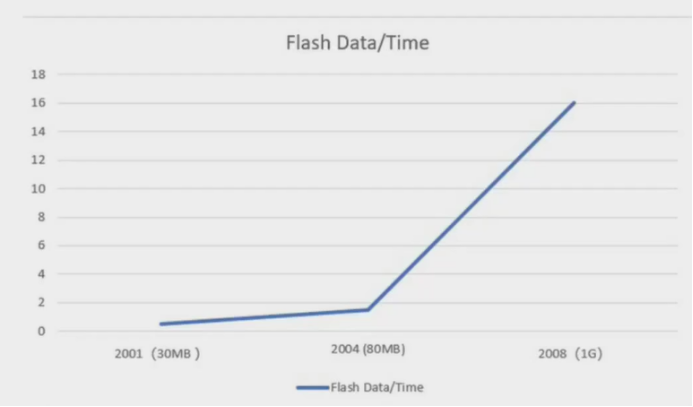
2004年寶馬預測,在2008年之后其量產的車型上面會引入一個我們現在所說的網關功能。根據寶馬的預測,在2008年其整車的音頻數據量會達到1G,如果采用當時的CAN,即便是高速CAN,最高傳輸速率是500K。如果要進行數據刷新或者FOTA的時候,刷1G的流量或者數據量的時候所需要的時間會達到16小時。這是不能被容忍的,所以寶馬提出這個引入的中央網關功能需要結合兩個功能:第一是在車內不同的CAN, FlexRay和MOST之間進行路由數據轉發;第二是作為與外界診斷接口和軟件刷新接口。 同時在這個需求背景之下,車載網絡也一直在面對數據量變大的一個外部現狀:
數據量大:高精度的ECU應用代碼,需要更大的ECU內存;
數量多:不斷增加的ECU數量,導致車內總線帶寬的瓶頸
新的應用場景:遠程刷新,遠程診斷,大數據傳輸和車聯網
外部的現狀促使我們必須要有一個新的總線來解決現有的通訊問題,同時針對這個新的總線我們也提出對應的介質需求:
帶寬:可以滿足新的需求(ADAS/車載娛樂)
可靠性:物理總線連接后,通信要穩定可靠
成本:成本低
2.2 車載以太網應用趨勢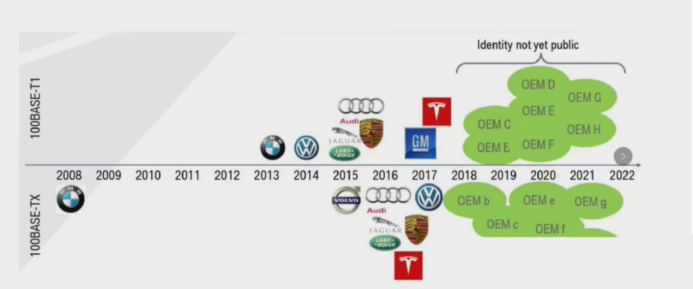
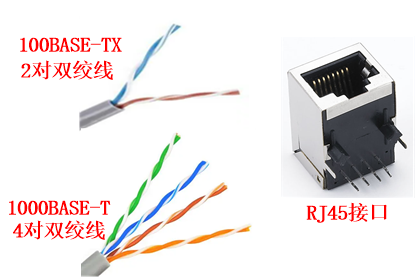
車載以太網應用趨勢 在08年的時候,寶馬開始以太網的應用研究,后來慢慢到2020年之后,許多廠家陸陸續續推出應用以太網的量產車型。 以太網分為100BASE-T1和100BASE-TX。100BASE-TX更多用于車輛與外部診斷接口相連,這就意味著需要兩對以太網,兩對雙絞線TX/RX,還有一根喚醒線,總共是5條線。 2.3 車載以太網優勢
簡化車載網絡架構
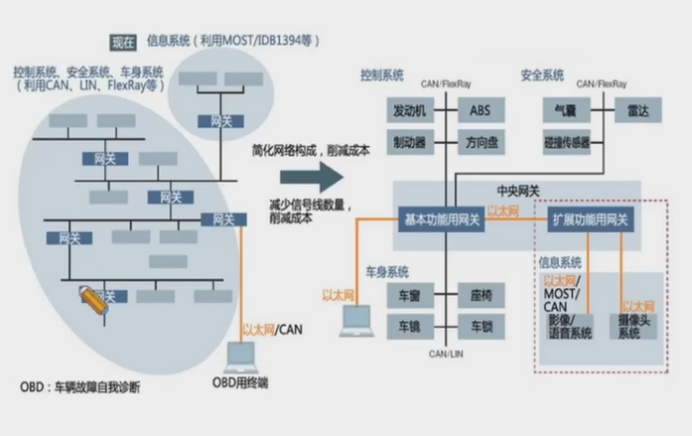
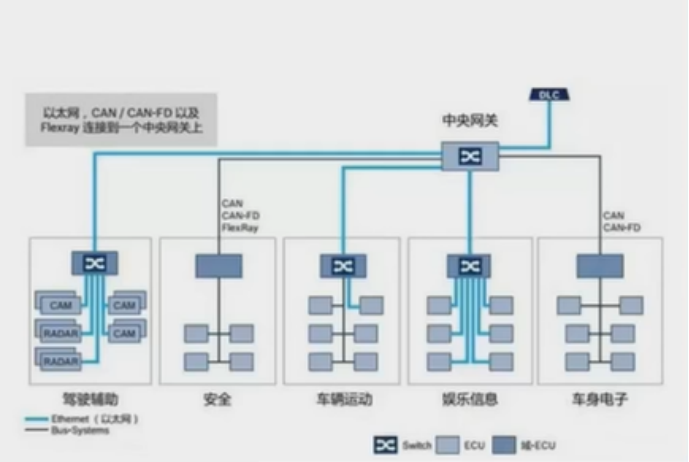
以前車上有很多網關/網絡,很多個網絡/網關進行數據連接,引入以太網之后,只需要通過一個基本功能網關來執行多種CAN的連接,比如底盤CAN, info CAN,隨著攝像頭和激光雷達、毫米波雷達的引入,整個帶寬的需求增加,進而衍生了域(Domain)的概念,域的概念就是車輛會有一個中央網關,每一塊功能上網的時候會有對應域,比如智能域,底盤域,娛樂域等。
域與中央網關通過以太網連接,而在域之下可以通過以太網甚至CAN/CANFD進行連接。這樣可以保證整個網絡是基于服務來獲取我們所需要的信息和資源。
輕量化,降低線束重量
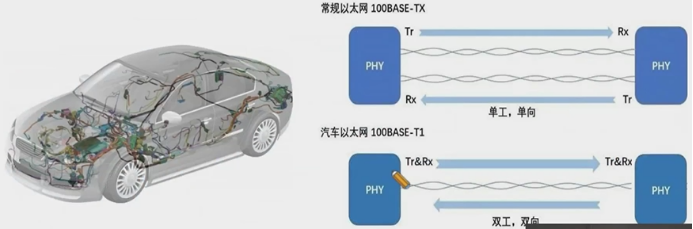
前面提到整個車載網絡的推行如果要落地,肯定是要具備相應的成本優勢。常規以太網是100BASE-TX,采用兩對雙絞線,一對雙絞線傳輸數據,另外一對雙絞線傳輸電源,而載以太網采用一對雙絞線,在一對雙絞線的基礎上面,同時進行信號和電源的傳輸,這樣就大大會減少整個線束的重量,同時也會降低線束的成本。 ?
3 車載以太網概述
3.1 車載以太網定義 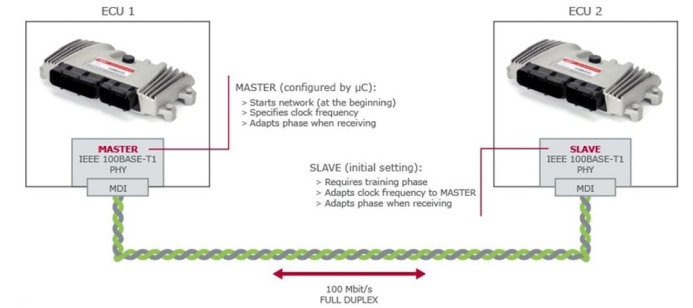
車載以太網是在單對雙絞線身上,匹配以太網連接器,同時進行供電和數據傳輸,實現100Mbit/s甚至1Gbit/s數據傳輸,整個鏈路特性阻抗為100歐姆。 車載以太網開發了PoDL,可以在一對線纜上為電子控制單元ECU的正常運行提供12V電壓
3.2 汽車以太網通信協議相關標準及組織
Open 聯盟:由博通公司聯合半導體公司飛思卡爾創建,更多的關注線纜也就是物理層信息
IEEE和AVNU:重點關注鏈路層信息
AUTOSAR組織:重點關注整個以太網刷新的接口跟外部的統一
ISO:聚焦包括所有速率的汽車以太網相關研究
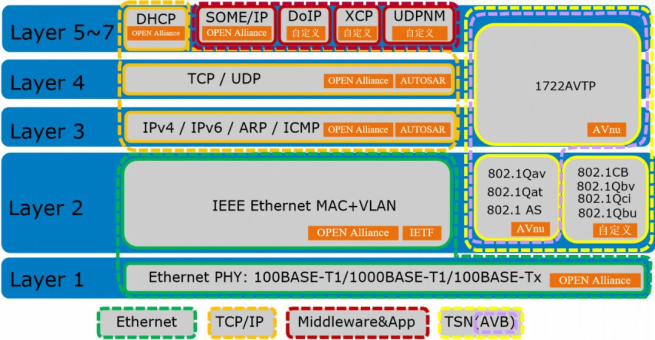
六大標準組織在鏈路層及應用層上的貢獻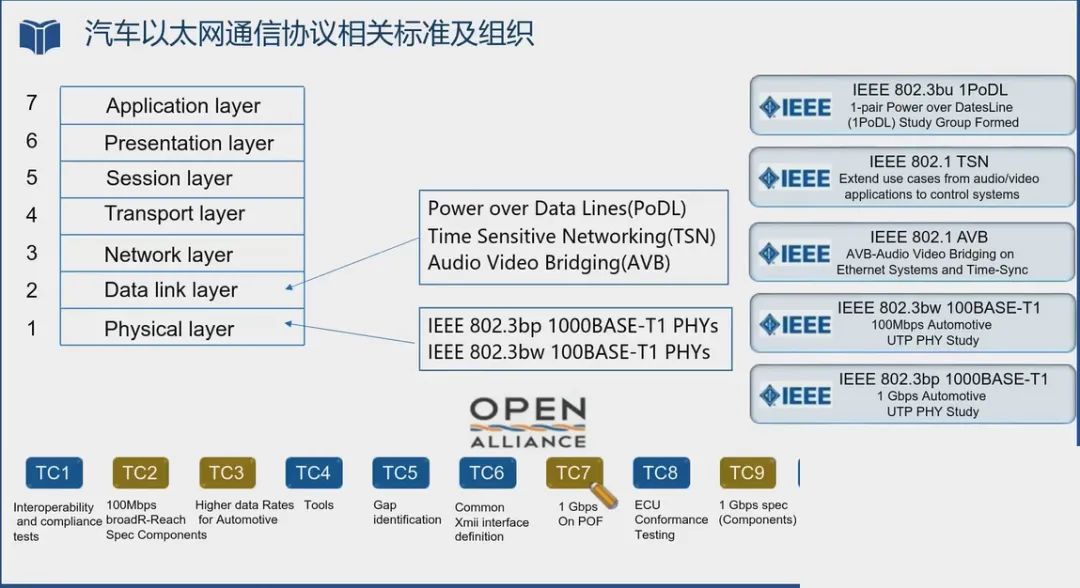
這里著重講解一下OPEN聯盟和IEEE在物理層和整個鏈路層上面的一些應用標準。
物理層:
TCX標準:由OPEN聯盟制定的標準,從TC1到TC12包含線纜、ECU、EMC的測試標準,TC2,TC3 TC7和TC9是整個物理層上面的標準。
802.3bp與802.3bw:IEEE組織推出,可以跟OPEN聯盟標準進行等效,比如說802.3等效成TC9,802.3bw等效成TC2
鏈路層:
PoDL(Power over Data Line)標準:前文提到以太網用一對雙絞線來傳輸,既能傳輸信號又能傳輸電源,這是因為采用一個PoDL標準。
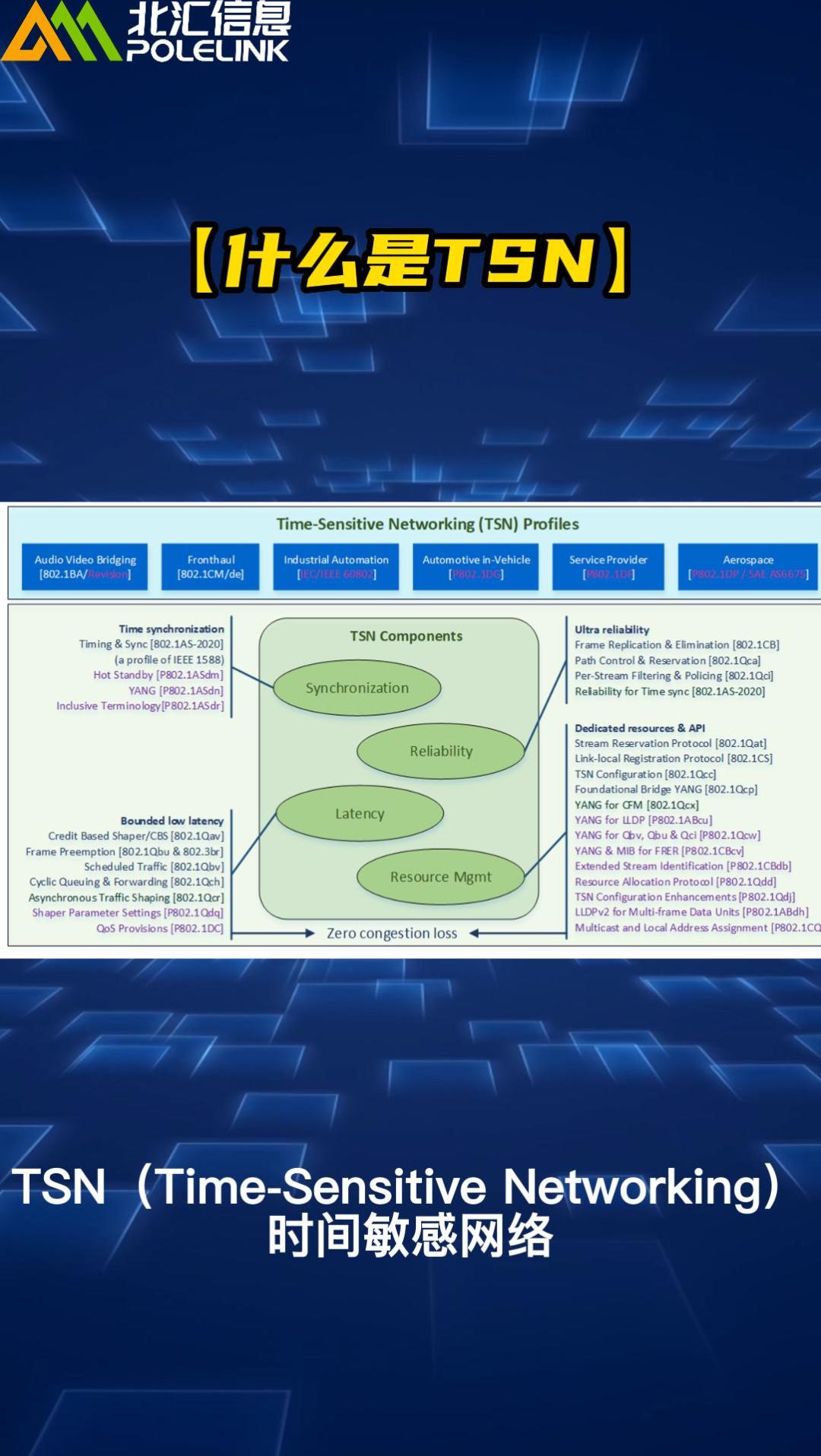
TSN(Time Sensitive Networking):IEEE標準小組發展的關于時間的標準
AVB(Audio Video Bridging):音視頻橋接標準
3.3 車載以太網在汽車上的應用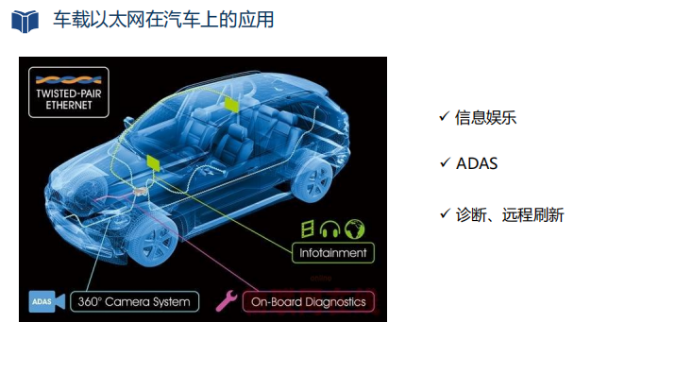
最后講解一下整個車載以太網的一個應用,車載以太網的出現是為了滿足隨著一些攝像頭,比如說毫米波雷達,激光雷達,ADAS,智能輔助駕駛,慢慢的應用之后必須要有一個新的網絡,來替代以前的一些CAN, CANFD, FlexRay,MOST的需求而誕生的網絡。目前車載以太網主要用用在三大領域:
信息娛樂:車輛大屏HSD線已經逐漸用以太網替代
ADAS:由于自駕域的出現,自駕域下面一些傳感器,比如中央處理器交互,以及后面傳感器控制器攝像頭之間的交互,慢慢的需要用到ADAS
診斷和刷新:前面提到的寶馬刷新需求,如果要刷1G數據量,若用以前的CAN或者CANFD,刷新要用16小時或8小時,然而用以太網之后速率能達100M的。在保證接口不變的情況下,即用到的連接器的接口都不變,只需要把CAN線換成以太網的線,就能達到相應的一個速率。
以上就是車載以太網在整個汽車上面應用分享。
審核編輯:劉清



























 工商網監
工商網監
評論