 電子發(fā)燒友App
電子發(fā)燒友App


摘要
對(duì)傳統(tǒng)汽車網(wǎng)絡(luò)總線類型及網(wǎng)絡(luò)架構(gòu)特點(diǎn)進(jìn)行分析,結(jié)合智能網(wǎng)聯(lián)汽車特點(diǎn)智能化和網(wǎng)聯(lián)化、以及智能網(wǎng)聯(lián)汽車對(duì)傳統(tǒng)汽車網(wǎng)絡(luò)架構(gòu)的挑戰(zhàn),提出基于以太網(wǎng)的汽車網(wǎng)絡(luò)架構(gòu)解決方法、并闡述了應(yīng)用以太網(wǎng)網(wǎng)絡(luò)架構(gòu)的應(yīng)用推進(jìn)過程、介紹了汽車以太網(wǎng)應(yīng)用協(xié)議的分類,解決了汽車大數(shù)據(jù)傳輸問題。
1 汽車網(wǎng)絡(luò)介紹
汽車網(wǎng)絡(luò),是指將汽車上的所有電子傳感器、電子執(zhí)行器、電子控制單元(ECU)連接在一起的通信形式。汽車功能簡單、每輛汽車上ECU數(shù)量少的情況下,可通過點(diǎn)對(duì)點(diǎn)通訊。隨著汽車功能的增多,汽車上傳感器、執(zhí)行器、ECU數(shù)量增多,點(diǎn)對(duì)點(diǎn)通信已不滿足需求。1991年,第一輛取代點(diǎn)對(duì)點(diǎn)通信,通過CAN總線傳輸?shù)能囕d網(wǎng)絡(luò)在奔馳S級(jí)汽車上誕生。經(jīng)過二十多年的發(fā)展,幾乎每輛汽車上都裝配有車載總線網(wǎng)絡(luò),車載總線網(wǎng)絡(luò)以CAN、LIN總線網(wǎng)絡(luò)為主,部分高端汽車搭載MOST、FlexRay總線等。
2?傳統(tǒng)汽車網(wǎng)絡(luò)架構(gòu)
2.1 傳統(tǒng)汽車網(wǎng)絡(luò)總線類型?
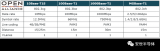
車載總線按照傳輸類型不同分為CAN、LIN、MOST、FlexRay。
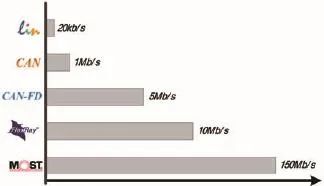 圖1 傳統(tǒng)汽車總線類型
圖1 傳統(tǒng)汽車總線類型
CAN(Controller Area Network),汽車最常用的車載總線類型,具有低成本、可靠的錯(cuò)誤檢測和處理機(jī)制、基于仲裁式發(fā)送方式、最大傳輸8Byte數(shù)據(jù)等特點(diǎn),可應(yīng)用于車身電子部件控制、發(fā)動(dòng)機(jī)控制、底盤電子控制等。
CAN FD(CAN with Flexible Data rate)是CAN的升級(jí),CAN FD總線彌補(bǔ)了CAN總線帶寬的制約缺陷。CAN FD數(shù)據(jù)場部分最大傳輸速率5Mbps,最大數(shù)據(jù)長度64Byte。
LIN(Local Interconnect Network)總線,是一種低成本、低速率的主從式串行通信總線。在不需要CAN總線帶寬和多功能的場合,如電動(dòng)門窗、座椅調(diào)節(jié)、電動(dòng)天窗、電動(dòng)雨刮、部分傳感器信號(hào)采集等,使用更低成本的LIN總線是對(duì)CAN總線通信的一種補(bǔ)充。 ? FlexRay起源于“X-By-Wire”的一種基于“時(shí)間觸發(fā)”協(xié)議的高性能、高可靠性實(shí)時(shí)總線。FlexRay報(bào)文最大可傳254Byte數(shù)據(jù),可以在精確的時(shí)間內(nèi)(可達(dá)1us)發(fā)送至目標(biāo)地址。FlexRay總線傳輸速率可達(dá)10M,主要應(yīng)用于對(duì)安全實(shí)時(shí)性要求較高的線控轉(zhuǎn)向、線控剎車等系統(tǒng)。
Most (Media Oriented System Transport)是面向媒體系統(tǒng)的傳輸總線,采用光纖作為傳輸介質(zhì),最大傳輸速率150Mbps,傳輸可靠性低,主要應(yīng)用于娛樂系統(tǒng)(CD/DVD、導(dǎo)航等)。
2.2 傳統(tǒng)汽車網(wǎng)絡(luò)架構(gòu)類型
傳統(tǒng)汽車網(wǎng)絡(luò)架構(gòu)以CAN總線為主, LIN總線為輔,如圖1,典型雙CAN網(wǎng)段汽車網(wǎng)絡(luò)架構(gòu),分車身CAN(B-CAN)和動(dòng)力底盤CAN(PCAN),B-CAN和P-CAN通過網(wǎng)關(guān)進(jìn)行數(shù)據(jù)交互,B-CAN選用LIN網(wǎng)絡(luò)作為輔助網(wǎng)絡(luò)。
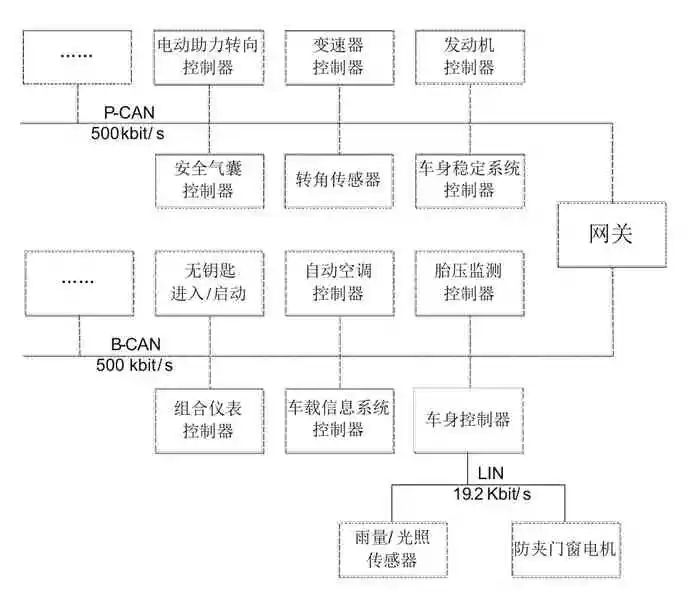
圖1 以CAN總線為主的汽車網(wǎng)絡(luò)架構(gòu)
?
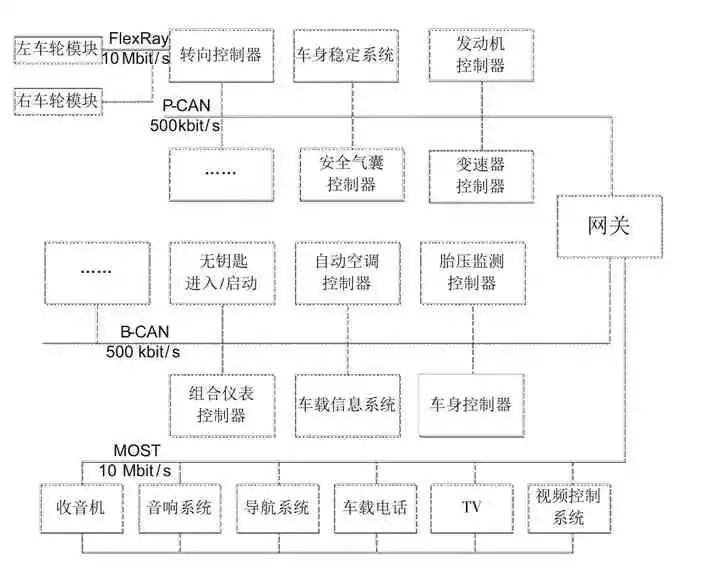
圖2 帶有MOST/FlexRay總線的網(wǎng)絡(luò)架構(gòu) ? 部分汽車動(dòng)力底盤系統(tǒng)網(wǎng)絡(luò)選用FlexRay總線,娛樂系統(tǒng)網(wǎng)絡(luò)選用MOST總線。如圖2,車輛主網(wǎng)絡(luò)架構(gòu)分為車身CAN(B-CAN)、動(dòng)力底盤CAN(P-CAN)和一路MOST總線,P-CAN、BCAN和MOST網(wǎng)段通過網(wǎng)關(guān)進(jìn)行數(shù)據(jù)交互。MOST總線實(shí)現(xiàn)娛樂系統(tǒng)數(shù)據(jù)傳輸,F(xiàn)lexRay總線作為動(dòng)力底盤CAN的補(bǔ)充,實(shí)現(xiàn)線控轉(zhuǎn)向控制功能。
3 智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)
3.1 智能網(wǎng)聯(lián)汽車的特點(diǎn)
智能網(wǎng)聯(lián)汽車的特點(diǎn)是智能化和網(wǎng)聯(lián)化。智能網(wǎng)聯(lián)汽車的目地是增強(qiáng)乘員的舒適性、優(yōu)化乘員的安全性、提供最現(xiàn)代的信息娛樂服務(wù)及更便利的汽車服務(wù)。
智能化,分為:對(duì)外界環(huán)境感知的智能化(含行人監(jiān)測、路標(biāo)監(jiān)測、前方車輛碰撞預(yù)警等)、對(duì)駕駛員狀態(tài)感知智能化(駕駛疲勞監(jiān)測等)、車輛控制的智能化(自適應(yīng)巡航、自動(dòng)泊車)、娛樂信息系統(tǒng)的智能化、汽車軟件升級(jí)智能化等。感知智能化意味著車輛上配備更多智能化的探測設(shè)備,如:高清攝像頭、毫米波雷達(dá)、激光雷達(dá)。車輛控制智能化意味著車輛有大量的控制相關(guān)的精準(zhǔn)數(shù)據(jù)需要交互。娛樂信息系統(tǒng)智能化意味著車輛上有更多高清音視頻數(shù)據(jù)。
網(wǎng)聯(lián)化即車聯(lián)網(wǎng):可通過網(wǎng)聯(lián)化實(shí)現(xiàn)智能交通、大數(shù)據(jù)、云等。網(wǎng)聯(lián)化意味著將汽車眾多的車輛行駛狀態(tài)數(shù)據(jù)、車輛故障數(shù)據(jù)、車輛采集的外界環(huán)境感知數(shù)據(jù)通過無線網(wǎng)絡(luò)傳輸給外界媒體或云端。3GPP會(huì)議上定義的5G三大場景:eMBB(3D/超高清視頻等大流量移動(dòng)寬帶業(yè)務(wù)),mMTC(大規(guī)模物聯(lián)網(wǎng)業(yè)務(wù)) 和 URLLC(無人駕駛、工業(yè)自動(dòng)化等需要低時(shí)延高可靠連接的業(yè)務(wù))。以及工信部[2016]450號(hào)文件《關(guān)于同意車載信息服務(wù)產(chǎn)業(yè)應(yīng)用聯(lián)盟開展智能交通無線電技術(shù)頻率研究批復(fù)》,中國將5905-5925MHz作為LTE-V2X的研究實(shí)驗(yàn)工作頻段。意味著汽車的網(wǎng)聯(lián)之路是必然趨勢。
3.2 智能網(wǎng)聯(lián)汽車對(duì)傳統(tǒng)汽車網(wǎng)絡(luò)架構(gòu)的挑戰(zhàn)
汽車的智能網(wǎng)聯(lián)化意味著車輛上有高于傳統(tǒng)汽車百倍、千倍、萬倍的數(shù)據(jù)需要傳輸,需要更高帶寬的車載網(wǎng)絡(luò)來適應(yīng)大數(shù)據(jù)傳輸。傳統(tǒng)的CAN總線常用傳輸速率500kbps,最大傳輸速率1Mbps;新型CANFD總線最大傳輸速率5Mbps;FlexRay總線,傳輸速率可達(dá)10Mbps,但價(jià)格昂貴,除了奧迪、寶馬,多數(shù)汽車廠商未使用;MOST總線采用價(jià)格昂貴的光纖,僅寶馬等少數(shù)車廠應(yīng)用。急需一種廉價(jià)、可靠、高帶寬的車載網(wǎng)絡(luò),解決大數(shù)據(jù)傳輸問題。
3.3 應(yīng)用于智能網(wǎng)聯(lián)汽車的新型總線以太網(wǎng)
引進(jìn)并改進(jìn)成熟民用以太網(wǎng),承擔(dān)汽車大數(shù)據(jù)傳輸,成為必然趨勢。如圖4,未來智能網(wǎng)聯(lián)汽車的網(wǎng)絡(luò)架構(gòu)將以以太網(wǎng)作為主網(wǎng)絡(luò),娛樂系統(tǒng)和輔助駕駛系統(tǒng)選用以太網(wǎng)充當(dāng)子網(wǎng)絡(luò),兼容傳統(tǒng)動(dòng)力底盤系統(tǒng)CAN(P-CAN)及車身舒適系統(tǒng)CAN(B-CAN)子網(wǎng)絡(luò)。輔助駕駛系統(tǒng)選用以太網(wǎng)傳輸高清攝像頭、高精度雷達(dá)的大數(shù)據(jù),娛樂系統(tǒng)選用以太網(wǎng)傳輸音視頻影音數(shù)據(jù)。車輛的相關(guān)數(shù)據(jù)(車輛狀態(tài)數(shù)據(jù)、道路環(huán)境高清視頻數(shù)據(jù) 、 雷達(dá)數(shù)據(jù))可通過 Telematics模塊 或V2X(Car2X)方式等傳輸?shù)酵饨缭贫恕⒒尽?shù)據(jù)控制中心等。車輛的娛樂系統(tǒng)控制器可通過Wi-Fi、藍(lán)牙等方式下載音視頻,使乘客在汽車上就可以享受家庭影院的效果。
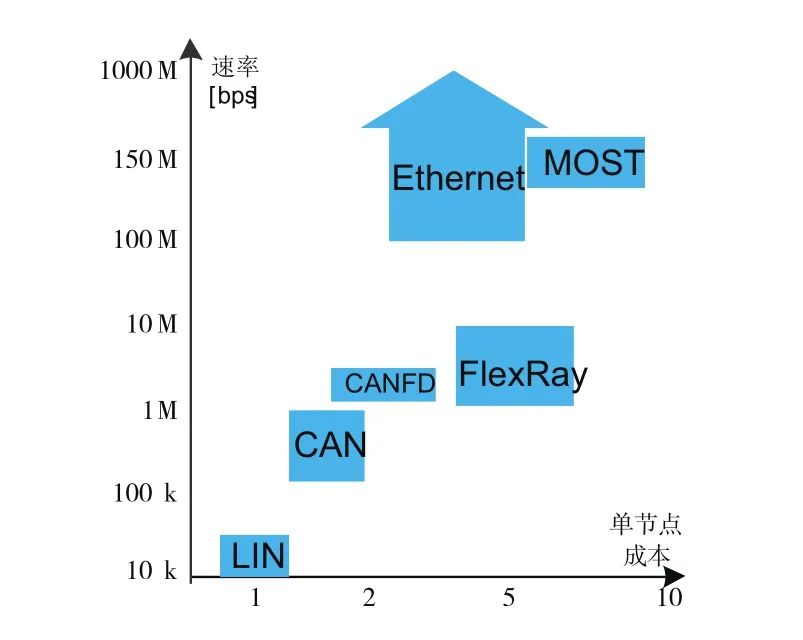
圖3 總線類型及成本消耗圖
?
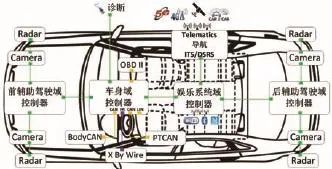
圖4 智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu) ?
3.4 基于以太網(wǎng)的汽車網(wǎng)絡(luò)架構(gòu)應(yīng)用發(fā)展過程
以太網(wǎng)在汽車網(wǎng)絡(luò)架構(gòu)上的引進(jìn)是一個(gè)由點(diǎn)到面發(fā)展的過程,可分兩代進(jìn)行發(fā)展。 第一代智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)如圖5所示,在輔助駕駛系統(tǒng)和娛樂系統(tǒng)中引進(jìn)汽車以太網(wǎng),應(yīng)用以太網(wǎng)傳輸高清攝像頭、雷達(dá)、音視頻數(shù)據(jù),動(dòng)力底盤系統(tǒng)和車身系統(tǒng)使用傳統(tǒng)CAN、CANFD進(jìn)行數(shù)據(jù)交互。
使用中央網(wǎng)關(guān)進(jìn)行輔助駕駛、娛樂系統(tǒng)、動(dòng)力底盤系統(tǒng)、車身系統(tǒng)間數(shù)據(jù)交互,中央網(wǎng)關(guān)兼有CAN、CAN-FD、Ethernet數(shù)據(jù)轉(zhuǎn)換功能。Telematics模塊布置在娛樂系統(tǒng)域,具有4G、5G網(wǎng)絡(luò)收發(fā)功能,可通過Telematics模塊下載或上傳車載數(shù)據(jù)。用于實(shí)現(xiàn)智能交通功能的V2X模塊布置在PTCAN,V2X模塊可通過LTEV2X網(wǎng)絡(luò)接收基站或其它車輛發(fā)生的DSRC或ITS數(shù)據(jù)。
第二代智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)如圖6所示,在第一代智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)基礎(chǔ)上引入動(dòng)力底盤域網(wǎng)關(guān)、車身域網(wǎng)關(guān)。動(dòng)力底盤系統(tǒng)和車身系統(tǒng)通過動(dòng)力底盤域網(wǎng)關(guān)、車身域網(wǎng)關(guān)實(shí)現(xiàn)和其它網(wǎng)段、域之間的數(shù)據(jù)交互,域網(wǎng)關(guān)兼有CAN、CAN-FD、Ethernet數(shù)據(jù)轉(zhuǎn)換功能。中央網(wǎng)關(guān)僅需支持Ethernet數(shù)據(jù)交互功能即可。
?
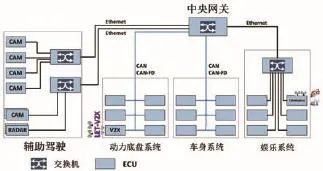
圖5 第一代智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)
?
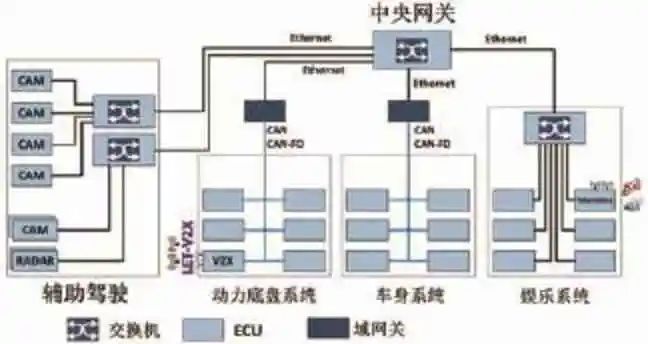
圖6 第二代智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu) ?
3.5 汽車以太網(wǎng)傳輸協(xié)議
智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)架構(gòu)對(duì)以太網(wǎng)的應(yīng)用主要在三方面:主網(wǎng)絡(luò)、輔助駕駛、娛樂系統(tǒng)。其中輔助駕駛和娛樂系統(tǒng)主要傳輸AV數(shù)據(jù)(Audio Video數(shù)據(jù)),主網(wǎng)絡(luò)主要傳輸各域、各網(wǎng)段間交互的汽車數(shù)據(jù)。按照OSI參考模型,結(jié)合汽車應(yīng)用特性,智能網(wǎng)聯(lián)汽車以太網(wǎng)應(yīng)用到的協(xié)議標(biāo)準(zhǔn)如下,如圖7所示:
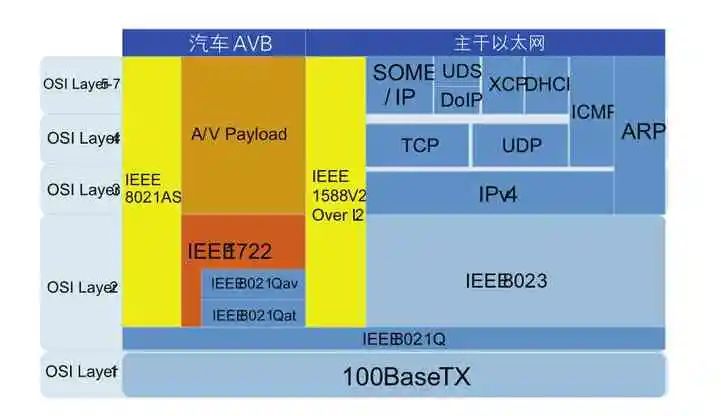
圖7 汽車以太網(wǎng)所用協(xié)議標(biāo)準(zhǔn) ? 輔助駕駛、娛樂系統(tǒng)傳輸AV數(shù)據(jù),數(shù)據(jù)間需要 同 步 , 選 用 汽 車 AVB(Audio Video Broadcasting)協(xié)議模型,兩層以太網(wǎng)協(xié)議模型(主要包括Layer1、Layer2)。其中Layer1物理層選用百兆快速以太網(wǎng),應(yīng)用BroadR–Reach技術(shù)采用一對(duì)5類非屏蔽雙絞線。layer2數(shù)據(jù)鏈路層選用AVB特 有 的 IEEE1722、 IEEE802.1Qav、IEEE802.1Qat、IEEE802.1AS協(xié)議。
802.1Qat流預(yù)留協(xié)議,解決網(wǎng)絡(luò)中A/V實(shí)時(shí)流量與普通異步TCP流量之間的競爭問題。IEEE802.1Qav隊(duì)列及轉(zhuǎn)發(fā)協(xié)議,確保傳統(tǒng)的異步以太網(wǎng)數(shù)據(jù)流量不會(huì)干擾到實(shí)時(shí)音視頻流。IEEE1722,音視頻傳輸協(xié)議,定義了局域網(wǎng)內(nèi)提供實(shí)時(shí)音視頻流服務(wù)所需的二層包格式,A/V流的建立、控制及關(guān)閉協(xié)議等。對(duì)應(yīng)于OSI參考模型的3-7層,用于放置A/V音視頻流數(shù)據(jù),即IEEE1722數(shù)據(jù)流中的數(shù)據(jù)內(nèi)容。IEEE802.1AS,高精度的時(shí)鐘同步協(xié)議,實(shí)現(xiàn)A/V音視頻流間的時(shí)鐘同步。
主網(wǎng)絡(luò),傳輸各域、各網(wǎng)段間交互的車輛狀態(tài)數(shù)據(jù)。選用七層以太網(wǎng)模型,其中Layer1物理層選用百兆快速以太網(wǎng),應(yīng)用BroadR–Reach技術(shù)采用一對(duì)5類非屏蔽雙絞線。layer2數(shù)據(jù)鏈路層應(yīng)用通用IEEE802.3協(xié)議。Layer3-7不僅應(yīng)用TCP/IP協(xié)議簇中的IPv4、UDP、TCP、ARP、ICPM,還增加了汽車特有的DoIP、SOME/IP、DHCP、UDS、XCP協(xié)議。其中DoIP實(shí)現(xiàn)以太網(wǎng)協(xié)議的診斷通訊,SOME/IP實(shí)現(xiàn)基于以太網(wǎng)協(xié)議的動(dòng)態(tài)處理及軟件架構(gòu),DHCP協(xié)議實(shí)現(xiàn)動(dòng)態(tài)主機(jī)IP分配,UDS實(shí)現(xiàn)汽車診斷功能,XCP完成基于以太網(wǎng)的標(biāo)定功能。
3.6 新型汽車網(wǎng)絡(luò)架構(gòu)所面臨的挑戰(zhàn)
新型汽車網(wǎng)絡(luò)架構(gòu)在滿足大數(shù)據(jù)傳輸需要的同時(shí),使越來越多的汽車電子部件暴露在外。更廣闊的外延帶來更好的應(yīng)用和體驗(yàn),也帶來了更多的攻擊入口。如何進(jìn)行系統(tǒng)綜合防護(hù)及防護(hù)功能的劃分,成為汽車網(wǎng)絡(luò)未來需要解決的問題。建立建全智能網(wǎng)聯(lián)汽車信息安全管理需求,制定智能網(wǎng)聯(lián)汽車信息安全技術(shù)標(biāo)準(zhǔn)和信息安全測試規(guī)范,建立智能網(wǎng)聯(lián)汽車信息安全應(yīng)急響應(yīng)體系,成為未來智能網(wǎng)絡(luò)汽車需要長遠(yuǎn)解決的問題,需要政府、企業(yè)都要積極應(yīng)對(duì)的一場曠日持久戰(zhàn)。
未來更高清視頻數(shù)據(jù)的傳輸,需要采用千兆及千兆以上以太網(wǎng)傳輸,千兆以太網(wǎng)對(duì)汽車電磁兼容性問題是未來汽車技術(shù)需要解決的。
4 結(jié)語
智能網(wǎng)聯(lián)汽車網(wǎng)絡(luò)未來會(huì)迎來眾多挑戰(zhàn),但任何問題和困難都阻擋不了汽車科技的進(jìn)步與技術(shù)的發(fā)展。相反,挑戰(zhàn)會(huì)促進(jìn)汽車技術(shù)的進(jìn)步、汽車安全法規(guī)的完善,給用戶一個(gè)更舒適、更先進(jìn)的駕車體驗(yàn)和乘車感知。
審核編輯:劉清

























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論