 電子發(fā)燒友App
電子發(fā)燒友App


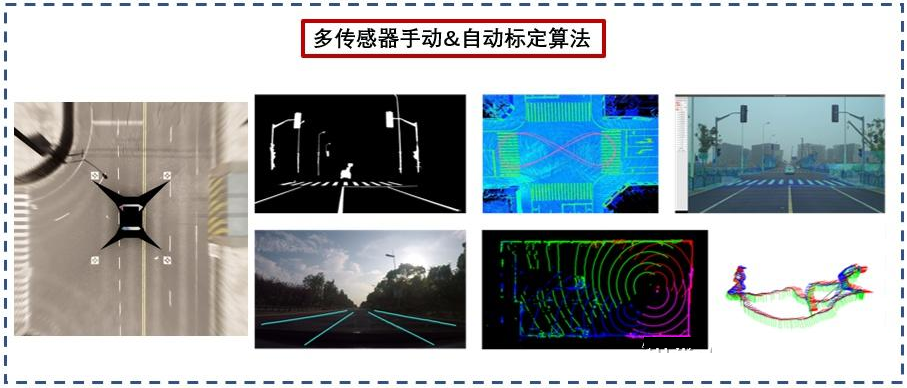
自動(dòng)駕駛車(chē)輛上通常會(huì)安裝多個(gè)傳感器作為感知輸入源,而首先來(lái)說(shuō)它們之間的坐標(biāo)關(guān)系是需要確定的,那么,傳感器標(biāo)定就是自動(dòng)駕駛的基本需求。一般情況下,整個(gè)標(biāo)定工作可分成內(nèi)參標(biāo)定和外參標(biāo)定兩部分。內(nèi)參是決定傳感器內(nèi)部的映射關(guān)系,比如攝像頭的焦距,偏心和像素橫縱比(+畸變系數(shù)),而外參是決定傳感器和外部某個(gè)坐標(biāo)系的轉(zhuǎn)換關(guān)系,比如姿態(tài)參數(shù)(旋轉(zhuǎn)和平移6自由度)。
傳感器校準(zhǔn)是智能車(chē)輛穩(wěn)健性能的基礎(chǔ)。傳統(tǒng)且常用的標(biāo)定方法是通過(guò)對(duì)智駕車(chē)輛在工廠下線電檢階段進(jìn)行的。一旦完成標(biāo)定和校準(zhǔn),其內(nèi)外參數(shù)在交付至客戶(hù)手里后將不會(huì)自動(dòng)優(yōu)化更新。
眾所周知,整個(gè)智駕感知領(lǐng)域幾乎無(wú)一例外的用到了計(jì)算機(jī)視覺(jué)相關(guān)的AI處理技術(shù),比如深度學(xué)習(xí)、人工智能、數(shù)據(jù)驅(qū)動(dòng)的各種優(yōu)化等。
?
以感知最常規(guī)的車(chē)道線識(shí)別為例。隨著自動(dòng)駕駛時(shí)代的到來(lái),需要車(chē)道線識(shí)別的應(yīng)用場(chǎng)景也越來(lái)越廣泛,相應(yīng)車(chē)道線識(shí)別技術(shù)也越來(lái)越重要,具體原因如下:
第一,覆蓋場(chǎng)景廣,車(chē)道線識(shí)別存在于自動(dòng)駕駛大多數(shù)的應(yīng)用場(chǎng)景,是自動(dòng)駕駛不可或缺的 基礎(chǔ)算法;
第二,重要安全保障,車(chē)道線識(shí)別能精準(zhǔn)的識(shí)別道路并最終幫助機(jī)器決策,也是行車(chē)安全的 重要保障。
第三,在高精地圖或輕地圖構(gòu)建領(lǐng)域,車(chē)道是所有高精地圖要素的道路關(guān)聯(lián)的主鍵,所以車(chē) 道線要素在高精地圖中是重中之重,車(chē)道線識(shí)別算法也至關(guān)重要。
基于此,自動(dòng)駕駛對(duì)于車(chē)道線識(shí)別結(jié)果精度的超高要求,而我們發(fā)現(xiàn)在真正識(shí)別過(guò)程中,已經(jīng)有很多Tier1或者Tier2都會(huì)或多或少的在實(shí)際路測(cè)過(guò)程中發(fā)現(xiàn)一些不利的感知結(jié)果。
比如在車(chē)輛從產(chǎn)線上下線后上路跑一定時(shí)間的路試后,很容易出現(xiàn)車(chē)道線跳變,目標(biāo)感知不準(zhǔn)確等結(jié)果。實(shí)際上這類(lèi)問(wèn)題的源頭這些算法供應(yīng)商也是有一定分析和應(yīng)對(duì)能力的。因?yàn)榇蟛糠诌@類(lèi)問(wèn)題的源頭都來(lái)自于由標(biāo)定內(nèi)外參數(shù)所決定的投影矩陣P或單應(yīng)矩陣H。通常情況下,他們采用的優(yōu)化方式包括如下幾種:
1)如果兩條車(chē)道線間歇性跳變,則可能是感知算法本身的原因?qū)е碌模@時(shí)候考慮在規(guī)控端做預(yù)處理。方法是以?xún)蓷l車(chē)道線做原始輸入,卡爾曼濾波預(yù)測(cè)輸出行駛中心線;
2)如果是其中一條車(chē)道線做間歇性跳變,則考慮是否是傳感器的某些內(nèi)外參數(shù)值隨著時(shí)間推移出現(xiàn)了校準(zhǔn)偏差。解決方法是利用車(chē)道線和目標(biāo)來(lái)計(jì)算一個(gè)較好的相機(jī)Pitch值,再在后端加上一些平行假設(shè)便可以很好的解決這類(lèi)問(wèn)題;
3)相機(jī)系統(tǒng)的長(zhǎng)期運(yùn)行和免維護(hù)優(yōu)勢(shì)只能通過(guò)自動(dòng)校準(zhǔn)方法來(lái)保證,它可以根據(jù)需要更新相機(jī)參數(shù)。然而,在自然環(huán)境中,干擾很容易對(duì)校準(zhǔn)造成挑戰(zhàn)。一種可能性是使用已知形狀的自然物體來(lái)重新校準(zhǔn)傳感器。如果考慮利用識(shí)別到的環(huán)境靜態(tài)目標(biāo)對(duì)傳感器進(jìn)行實(shí)時(shí)在線標(biāo)定時(shí),則是利用光流或其他先進(jìn)的視頻跟蹤檢測(cè)技術(shù)則可以獲得一個(gè)高質(zhì)量的Pitch值。
01
自校準(zhǔn)方法概述
常用的相機(jī)標(biāo)定方法需要一些特殊的參考圖案,例如棋盤(pán),其物理尺寸等。并且,這些都是事先已知的。然而,當(dāng)車(chē)輛在路上時(shí),這些特殊圖案并不容易獲得。在這種情況下,自動(dòng)校準(zhǔn)系統(tǒng)就需要從其環(huán)境中提取參考信息。
總結(jié)起來(lái),對(duì)于自動(dòng)校準(zhǔn)的方法而言可歸類(lèi)為如下幾種:
1)從道路虛線中提取消失點(diǎn)或道路拐角進(jìn)行在線標(biāo)定。
2)接收來(lái)自其他汽車(chē)的預(yù)定義特征點(diǎn)來(lái)建立對(duì)應(yīng)模型,用于獲取交通攝像頭參數(shù)。
3)基于定義車(chē)輛流的三個(gè)消失點(diǎn)來(lái)監(jiān)控?cái)z像頭校準(zhǔn)。
4)通過(guò)將行走的人物目標(biāo)為垂直線段來(lái)完成相同的工作。
實(shí)際上,對(duì)于自校準(zhǔn)方法來(lái)說(shuō),當(dāng)前考慮的策略是可以從道路線中提取特征點(diǎn)用于校準(zhǔn),但不可能假設(shè)不同區(qū)域的道路線寬度相同。此外,由于磨損,沿道路線的輪廓可能存在缺陷。這些偽圖像和圖像變化將會(huì)導(dǎo)致一定的校準(zhǔn)錯(cuò)誤。
針對(duì)以上問(wèn)題將有兩種解決方案。一種方法是在車(chē)端設(shè)計(jì)一個(gè)結(jié)構(gòu)化道路環(huán)境(在道路上繪制的已知大小的網(wǎng)格),當(dāng)車(chē)輛駛近時(shí),攝像機(jī)會(huì)檢測(cè)到該環(huán)境。另一種方法使用放置在汽車(chē)引擎蓋上的幾個(gè)標(biāo)記,快速估計(jì)車(chē)載攝像頭的相對(duì)位置和方向。然而,這可能會(huì)分散其他司機(jī)的注意力,假設(shè)引擎蓋在攝像頭的視野范圍內(nèi),并且如果引擎蓋不平坦,則不同車(chē)輛的性能可能會(huì)有所不同。因此,如上兩種方法都不適合真實(shí)的駕駛場(chǎng)景。
02
本文提出的優(yōu)化自校準(zhǔn)方案
本文的重點(diǎn)就是研究一種新的優(yōu)化方案對(duì)傳感器的實(shí)時(shí)在線標(biāo)定。這里的重點(diǎn)是基于識(shí)別環(huán)境中的交通標(biāo)志(例如停車(chē)標(biāo)志、限速標(biāo)志等幾類(lèi)常規(guī)的標(biāo)志)并將其用于重新校準(zhǔn)相機(jī)的方法。該方法基于檢測(cè)、幾何估計(jì)、校準(zhǔn)和遞歸更新幾個(gè)步驟來(lái)具體實(shí)現(xiàn)。實(shí)時(shí)標(biāo)定的結(jié)果可以清楚地顯示其收斂和改進(jìn)的性能。
與設(shè)計(jì)圖案不同,停車(chē)標(biāo)志無(wú)處不在。停車(chē)標(biāo)志的物理尺寸由交通部標(biāo)準(zhǔn)化。與城市環(huán)境中存在的其他參考信息相比,使用交通標(biāo)志,尤其是停車(chē)標(biāo)志具有三個(gè)優(yōu)勢(shì):
可以亞像素精度檢測(cè)到足夠的特征點(diǎn)(從停車(chē)標(biāo)志的內(nèi)八角開(kāi)始至少八個(gè))。
與其他參考對(duì)象(例如道路線)相比,停車(chē)標(biāo)志的相關(guān)幾何屬性保持不變,因?yàn)樗鼈冇蓪?duì)外力具有魯棒性的金屬制成。
車(chē)輛在接近停車(chē)標(biāo)志時(shí)減速,減少圖像模糊和滾動(dòng)快門(mén)效果。
傳感器校準(zhǔn)是智能車(chē)輛穩(wěn)健性能的基礎(chǔ)。在自然環(huán)境中,干擾很容易對(duì)校準(zhǔn)造成挑戰(zhàn)。一種可能性是使用已知形狀的自然物體來(lái)重新校準(zhǔn)傳感器。因此,我們提出了一種使用停車(chē)標(biāo)志進(jìn)行自動(dòng)校準(zhǔn)的方法。
整個(gè)標(biāo)定邏輯流程圖如下:
如上所描述的檢測(cè)重點(diǎn)在于如下幾個(gè)重要的模塊處理。
1)交通標(biāo)志檢測(cè):
對(duì)于依靠路標(biāo)進(jìn)行實(shí)時(shí)在線標(biāo)定的情況,需要在行車(chē)過(guò)程中實(shí)時(shí)檢測(cè)道路中的交通標(biāo)志信息。當(dāng)前,在卷積神經(jīng)網(wǎng)絡(luò) (CNN) 的幫助下,目標(biāo)檢測(cè)一直是一個(gè)研究得很好的領(lǐng)域。通用的檢測(cè)架構(gòu)(例如 YOLO、YOLOv3)可以輕松地實(shí)時(shí)運(yùn)行(45 Hz);而基于提案的架構(gòu)(例如 Faster R-CNN 、FPN)需要更多資源并且通常需要更長(zhǎng)的運(yùn)行時(shí)間,在準(zhǔn)確性方面通常優(yōu)于前者,尤其是對(duì)于小物體和復(fù)雜場(chǎng)景。此外,標(biāo)記對(duì)象像素的實(shí)例分割方法也可用于查找停車(chē)標(biāo)志邊界框。
2)形狀匹配:
形狀匹配是通過(guò)使用相似性度量檢查需要比較較的兩個(gè)標(biāo)志形狀的相似性。特別是在我們這種利用停車(chē)標(biāo)志進(jìn)行在線標(biāo)定的例子中,檢測(cè)到的停車(chē)標(biāo)志邊緣包圍的形狀必須是八邊形。這里可以用旋轉(zhuǎn)函數(shù)表示多邊形并測(cè)量 Lp 距離。當(dāng)然,也可以進(jìn)一步考慮(除了旋轉(zhuǎn)、平移和尺度不變性之外)仿射不變性。
智能汽車(chē)實(shí)時(shí)在線標(biāo)定系統(tǒng)可分為七個(gè)模塊(如下圖)。
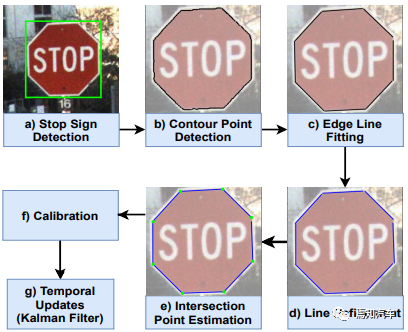
前五個(gè)部分從城市圖像序列生成角點(diǎn)的 2D-3D 對(duì)應(yīng)對(duì),后兩個(gè)部分是計(jì)算內(nèi)在參數(shù)的最后兩個(gè)步驟。這里我們將分別進(jìn)行過(guò)程闡述。
1、停止標(biāo)志檢測(cè)Stop Sign Detection
標(biāo)志檢測(cè)階段通過(guò)使用能夠具有 ResNet-50 和特征金字塔網(wǎng)絡(luò)主干的Mask R-CNN 模型對(duì)圖像幀進(jìn)行處理,從而生成 2D 邊界框(如上圖a中的綠色框)。Mask R-CNN 模型相對(duì)較低的速度不會(huì)影響我們當(dāng)前的非實(shí)時(shí)系統(tǒng),因?yàn)殚_(kāi)銷(xiāo)主要在于邊緣線擬合模塊。因此,與 Faster R-CNN 相比,Mask R-CNN 具有更高的停車(chē)標(biāo)志檢測(cè)率,這可能通過(guò)提供更多參考候選來(lái)提高我們系統(tǒng)的校準(zhǔn)精度。
2、通過(guò)顏色分割檢測(cè)輪廓點(diǎn)
該模塊從停車(chē)標(biāo)志中檢測(cè)紅色內(nèi)八邊形的輪廓點(diǎn)(如上圖b)。圖像預(yù)處理階段,可以使用從 RGB 到 HSV的顏色空間轉(zhuǎn)換來(lái)對(duì)帶閾值的紅色部分進(jìn)行提取。
然后,在 HSV 圖像上,使用常規(guī)的邊緣檢測(cè)算法(如Canny/Devernay 算法)進(jìn)行邊緣提取,從而以亞像素精度來(lái)獲得八邊形的輪廓點(diǎn)。由于邊緣檢測(cè)算法在本文中是十分重要的。因此,這里可以簡(jiǎn)單說(shuō)明下Canny算法和Devernay的技術(shù)原理。
A、Canny算法
Canny算法實(shí)際上是將高斯濾波器的一階導(dǎo)數(shù)應(yīng)用于圖像檢測(cè)中,從而可以獲得圖像梯度,其中邊緣點(diǎn)是沿法線方向 n 的局部最大值。
與邊緣正交的方向 n 可以用圖像梯度近似:
如上公式中, G 和 I 分別是高斯濾波器和圖像, * 代表卷積運(yùn)算符。
B、Devernay 亞像素校正
通過(guò) Canny 算法雖然可以實(shí)現(xiàn)基礎(chǔ)的邊緣檢測(cè)過(guò)程,但是其獲得的邊緣點(diǎn)是整像素精度級(jí)別的。而對(duì)于我們的系統(tǒng)而言,處理過(guò)程都是需要亞像素精度,這可以通過(guò)使用 Devernay 矯正算法對(duì)Canny進(jìn)行算法改進(jìn)。假設(shè)B是用Canny算法得到的像素點(diǎn)(對(duì)應(yīng)法線方向n上的局部梯度最大值)。B 沿 n 的兩個(gè)相鄰點(diǎn)的梯度可以通過(guò)線性插值來(lái)近似。然后,邊緣點(diǎn)的子像素位置被細(xì)化為所有這三個(gè)點(diǎn)(沿 n)的一維二次插值的最大值。
接下來(lái)是需要對(duì)處理結(jié)果進(jìn)行輪廓點(diǎn)鏈接。為了實(shí)現(xiàn)這個(gè)目的,需要將上述獨(dú)立的邊緣檢測(cè)點(diǎn)分組形成若干鏈。為了確保輪廓檢測(cè)的唯一性,需要采用密集點(diǎn)檢測(cè)方法,將包含最多點(diǎn)的一個(gè)就會(huì)選定為內(nèi)八邊形的輪廓。
3、邊緣線擬合
如上八邊形雖然檢測(cè)出了整體的輪廓,但是還需要依靠一定的邊緣線擬合算法將這些輪廓點(diǎn)擬合成真實(shí)的八邊形。
操作過(guò)程針對(duì)給定上面停車(chē)標(biāo)志輪廓上的一組二維點(diǎn) X ∈ R N×2,將其擬合八條線,每條線的估計(jì)都會(huì)生成八邊形的一條邊。通過(guò)找到具有最多“支持點(diǎn)”的線,一次估計(jì)一條邊。當(dāng)點(diǎn)到線的距離在接近閾值(本文中,閾值固定為 0.5 個(gè)像素距離可以確保亞像素被準(zhǔn)確估計(jì))內(nèi)時(shí),則認(rèn)為該輪廓點(diǎn)可以“支持”對(duì)該對(duì)應(yīng)線的估計(jì)。
如上輪廓線的選擇是通過(guò)對(duì)原始輪廓點(diǎn)集合運(yùn)行 RANSAC 算法來(lái)完成的。請(qǐng)注意,此處迭代次數(shù)受 N2 的限制,方法是遍歷所有對(duì)。一旦一條邊被擬合,所有的支持點(diǎn)都從原始集合中移除,這樣就可以重復(fù)相同的算法來(lái)找到不同的邊。
結(jié)合概率p ∈ [0, 1) 最終最小二乘線是最受支持的線的概率,迭代次數(shù) K 可以計(jì)算參照如下公式:
其中 w =1(8?i)2 , i ∈ {0, ..., 7} 是從支持集中選擇一個(gè)點(diǎn)的機(jī)會(huì),假設(shè) X 中輪廓外的異常值很少。確定 p 涉及考慮估計(jì)精度和運(yùn)行時(shí)間之間的權(quán)衡。假如當(dāng)前設(shè)定精度比運(yùn)算效率更重要,則需要將 p 設(shè)置為盡可能接近 1(例如 0.999)。
4、垂直搜索線細(xì)化
RGB/HSV類(lèi)型圖像梯度的大小可以實(shí)際表示出八邊形輪廓的位置,其中顏色在鄰域中變化最突然。考慮到智能汽車(chē)可能行駛在夜間或可見(jiàn)度不足的場(chǎng)景下,這時(shí)由于光照不足可能會(huì)導(dǎo)致 HSV 空間中的誤導(dǎo)性顏色分割,原始點(diǎn)可能會(huì)偏離輪廓。因此,線細(xì)化是必要的,這里可以通過(guò)局部搜索將移動(dòng)的線調(diào)整回真正的八邊形邊緣。
從估計(jì)線開(kāi)始,我們沿著線的垂直方向搜索局部最大梯度,并旋轉(zhuǎn)線以與其對(duì)齊。在曝光不足/曝光過(guò)度的情況下,邊緣的梯度峰可能會(huì)消失。因此,引入細(xì)化邊界可以很好的解決這個(gè)問(wèn)題。假設(shè)細(xì)化應(yīng)該是微妙的,只有當(dāng)超過(guò)一半的 S 細(xì)化點(diǎn)在邊界內(nèi)時(shí),才會(huì)更新一條線。
細(xì)化邊界可以用百分比 B ∈ [0, 1] 進(jìn)行參數(shù)化,這意味著細(xì)化點(diǎn)最多是白色邊界寬度的 100 % 沿垂直方向遠(yuǎn)離原始位置。為了估計(jì)停車(chē)標(biāo)志的白色邊框?qū)挾龋梢詫⒐烙?jì)的線段的長(zhǎng)度乘以交通標(biāo)志規(guī)則中記錄的內(nèi)部多邊形邊緣的寬長(zhǎng)比。
5、交點(diǎn)估計(jì)
八條估計(jì)線最多有28 個(gè)交點(diǎn),而其中只有八個(gè)是有效的八邊形角。一種簡(jiǎn)單有效且常用的方法是選擇靠近線段端點(diǎn)(例如,在 10 像素距離內(nèi))的交點(diǎn)。然后,角點(diǎn)數(shù)不等于 8 的任何估計(jì)都會(huì)被丟棄。
例如,按順時(shí)針順序(相對(duì)于點(diǎn)的幾何中心)對(duì)角點(diǎn)進(jìn)行排序有助于獲得 2D-3D 對(duì)應(yīng)關(guān)系。此外,第一個(gè)角始終可以設(shè)置為字符“S”的左上角,因?yàn)橥\?chē)標(biāo)志通常是直立的。
為了進(jìn)一步驗(yàn)證角點(diǎn)的有效性,采用Hausdorff距離方法來(lái)保證最終的八點(diǎn)集在仿射變換下形成八邊形。
6、平面物體校準(zhǔn)
通常這類(lèi)標(biāo)準(zhǔn)的模型可使用針孔相機(jī)模型進(jìn)行校準(zhǔn)。即,將世界坐標(biāo)中的 3D 點(diǎn) (X, Y, Z) 投影到圖像中作為像素 (u, v)表示。通過(guò)以下等式可以將 (u, v) 與 (X, Y, Z) 聯(lián)系起來(lái):
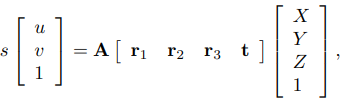
其中 s 是未知標(biāo)量,A ∈ R 3×3 是相機(jī)固有矩陣(假設(shè)無(wú)偏斜約束)。r1, r2, r3 是旋轉(zhuǎn)矩陣的列,t 是平移向量。它們通常被稱(chēng)為相機(jī)外部參數(shù),因?yàn)樗鼈兙哂袑⑹澜缱鴺?biāo)點(diǎn)轉(zhuǎn)換為相機(jī)坐標(biāo)系的功能。
在標(biāo)定過(guò)程中,如果 3D 坐標(biāo)系固定在棋盤(pán)或停車(chē)標(biāo)志等平面物體上,則等式 3 中的 Z 分量始終為零,從而得到一個(gè)簡(jiǎn)化的等式:
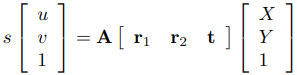
我們用 M = (X, Y, 1)T 和 m = (u, v, 1)T 分別表示平面物體上一點(diǎn)的位置和它在圖像中的位置。它們的關(guān)系由單應(yīng)矩陣 H 定義如下:

很明顯,H 是一個(gè) 3 × 3 矩陣,直到一個(gè)比例因子。可以使用 N ≥ 4 個(gè)點(diǎn)來(lái)計(jì)算單應(yīng)性矩陣 H。
在我們的系統(tǒng)中,檢測(cè)到停車(chē)標(biāo)志的 8 個(gè)角點(diǎn)后就可以用H =[h1 h2 h3] 來(lái)表示 H。由式5可得:

基于 r1, r2 是標(biāo)準(zhǔn)正交的知識(shí),我們得到計(jì)算內(nèi)參矩陣 A 所需的兩個(gè)約束如下:
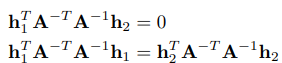
這樣就可以獲得計(jì)算內(nèi)參矩陣 A 所需的兩個(gè)約束。
在我們的系統(tǒng)中,假設(shè)主點(diǎn)固定在圖像平面的中心,只有焦距 fx 和 fy 被計(jì)算并迭代更新,那么對(duì)于棋盤(pán)校準(zhǔn),我們也需要出于比較的目的強(qiáng)制執(zhí)行此假設(shè)。
封閉形式的解決方案可以通過(guò)最大似然推理進(jìn)行改進(jìn):原始校準(zhǔn)需要用作非線性?xún)?yōu)化問(wèn)題進(jìn)行初始推算,也可以使用Levenberg-Marquardt 算法進(jìn)行求解。目前,這部分不包含在我們的系統(tǒng)中。
7、卡爾曼濾波器校準(zhǔn)的時(shí)間更新
這里的優(yōu)化更新目標(biāo)是隨著時(shí)間的推移可能會(huì)產(chǎn)生其他的一些噪聲,這時(shí)就需要通過(guò)不斷地優(yōu)化來(lái)整合相機(jī)內(nèi)參矩陣。我們一般假設(shè)該推理過(guò)程會(huì)引入一些標(biāo)準(zhǔn)的高斯噪聲,那么我們就可以使用具有不同噪聲協(xié)方差矩陣的卡爾曼濾波器來(lái)進(jìn)行優(yōu)化和更新。
標(biāo)準(zhǔn)的卡爾曼濾波器預(yù)測(cè)公式如下:

其中 xt, xt+1 是在不同時(shí)間估計(jì)的相機(jī)內(nèi)參向量。研究的一個(gè)基本假設(shè)是如果假設(shè)內(nèi)在參數(shù)在短期估計(jì)內(nèi)是恒定的,那么F 就可以成為單位矩陣。
此時(shí),整個(gè)更新步驟是通過(guò)如下公式進(jìn)行的:

過(guò)程噪聲和測(cè)量噪聲 δ 是具有零均值的高斯隨機(jī)向量。它們的協(xié)方差分別由(對(duì)角線)矩陣 Q = E( T )、R = E(δδT ) 表示。Q 指定了我們認(rèn)為內(nèi)在參數(shù)隨時(shí)間變化的程度,對(duì)于較短的估計(jì)期應(yīng)該較低。R 確定一次估計(jì)中有多少噪聲。直觀地說(shuō),隨著過(guò)程的進(jìn)行,這種測(cè)量噪聲應(yīng)該從高值開(kāi)始降低,因?yàn)槭褂玫膱D像越多,校準(zhǔn)就越準(zhǔn)確。
03
結(jié)論
高階駕駛輔助系統(tǒng)對(duì)其傳感器是否具有穩(wěn)健的性能要求十分嚴(yán)苛,因?yàn)檫@是系統(tǒng)能否實(shí)現(xiàn)準(zhǔn)確環(huán)境感知的關(guān)鍵。從當(dāng)前的發(fā)展趨勢(shì)看起來(lái),最有前途的傳感模式則是成像模式,因?yàn)閺膱D像中可以計(jì)算出低成本且豐富的環(huán)境信息。由于相機(jī)系統(tǒng)經(jīng)常用于距離感知、速度推理和目標(biāo)檢測(cè)。對(duì)于此類(lèi)應(yīng)用,相機(jī)參數(shù)通常對(duì)于重建部分場(chǎng)景和影響測(cè)量精度至關(guān)重要。影響參數(shù)準(zhǔn)確性的往往來(lái)自原相機(jī)的精確校準(zhǔn)及自適應(yīng)優(yōu)化過(guò)程。然而,當(dāng)攝像頭安裝在車(chē)輛上時(shí),攝像頭固有的由于道路顛簸引起的機(jī)械振動(dòng)或天氣引起的溫度波動(dòng)參數(shù)會(huì)發(fā)生變化。因此,長(zhǎng)期使用反復(fù)校準(zhǔn)相機(jī)也將是一個(gè)挑戰(zhàn)。
本文提出了一種基于識(shí)別交通標(biāo)志(例如停車(chē)標(biāo)志)并將其用于重新校準(zhǔn)相機(jī)的方法。該方法是基于檢測(cè)、幾何估計(jì)、校準(zhǔn)和遞歸更新來(lái)實(shí)現(xiàn)的。可以在需要最小相機(jī)運(yùn)動(dòng)的任務(wù)開(kāi)始之前校準(zhǔn)一次相機(jī),因?yàn)榭梢约俣ㄏ鄼C(jī)內(nèi)部參數(shù)是靜態(tài)的。實(shí)際證明,采用這類(lèi)道路靜態(tài)目標(biāo)對(duì)相機(jī)的實(shí)時(shí)校準(zhǔn)是非常有效且受用的。后續(xù)我們可以推斷出其他類(lèi)型的道路靜態(tài)目標(biāo)校準(zhǔn)方式,比如限速牌,人行橫道等典型的標(biāo)識(shí)。實(shí)際是越多的圖片加入校準(zhǔn)庫(kù),對(duì)于實(shí)時(shí)在線校準(zhǔn)越有利,但是同時(shí)也要關(guān)注到整個(gè)中央域控的運(yùn)算能力等。
審核編輯:劉清












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論