和我們的駕駛體驗產生革命性影響。不過,對于無人駕駛車輛的無限期待也容易使我們忽視了汽車廠商的大量短期開發,而這些開發對于改變駕駛行為同等重要。
2015-12-01 10:19:03 938
938 道路上行駛。 鑒于以上兩點,國創中心主導,整合行業資源共同打造了一款 L4 的無人駕駛汽車,目前已經在首鋼園區內穩定運行。系統總體方案如圖 1 所示。 2. ? 無人駕駛系統的設計與實現 無人駕駛系統是通過多種車載傳感器獲取車輛自
2021-05-21 14:51:0612659 
攝像頭,激光測距儀,夜視儀,車載信息技術,車載電腦,車輛控制技術,預防碰撞系統,車道保持系統,立體視覺系統,自動泊車系統,紅外照相機設備,電磁控制系統,人機交互系統,車聯網平臺,智能交通等;無人駕駛
2017-02-22 19:57:21
近來無人駕駛車輛引起了廣泛熱議。 業界正在努力開發這種技術,將其作為提高安全性和節省費用的方法。 這已不再是遙不可及的構想,寶馬、奔馳和特斯拉等公司均已發布或即將發布可使汽車自動駕駛的車輛系統。一些
2017-04-28 17:11:01
及時發現前方車輛并作出反應。相比之下,在谷歌“無人駕駛”模式下,無人駕駛系統被視為“駕駛員”并對行車安全負完全責任,責任是非常清晰的。就可靠性而言,特斯拉公司同樣表示目前其自動駕駛(Autopilot)處于
2017-09-28 16:50:52
無人駕駛分級無人駕駛汽車關鍵技術
2021-01-21 07:13:47
3. 高速公路上的無人駕駛檔越野型的路行場景中,本系統可以用于軍事中,也可以用于夜間無人區域(校園,小區)的巡查車輛上,在車輛上裝上報警系統,遇到異常情況,報警信息可以傳送到監控中心,可以節省人工巡查
2014-11-11 11:21:30
。受害人被送往附近醫院,并在抵達后不久被宣布死亡。在自動駕駛的自動駕駛SUV中,事件發生時有一個人在車輪后方,但是這個人并沒有實際控制車輛。據地方當局稱,事發時車輛上沒有其他乘客。應該指出
2020-06-16 19:01:35
在通往無人駕駛的神奇之路上,英特爾勇往直前。在1939年世界博覽會上,通用汽車的未來世界展覽預示,由嵌入技術的道路控制汽車的新時代終將到來。早期的無人駕駛汽車概念更關注支持車輛的基礎設施,而非車輛本身。
2020-05-13 06:07:36
使用無人駕駛汽車更接近現實”。試想一輛谷歌自動駕駛貨車只能開到我的街道,而一輛谷歌無人機可飛到我的房子完成旅程,按門鈴,并放下一堆最近訂購的開學課本在臺階上(而不在我的腳邊),相當了不起。無人機比自動駕駛
2018-11-01 09:00:20
無人駕駛汽車開發的關鍵技術主要有兩個方面:車輛定位和車輛控制技術。這兩方面相輔相成共同構成無人駕駛汽車的基礎。
2020-03-18 09:02:01
無人駕駛汽車的工作原理是什么?無人駕駛汽車包括哪些技術?
2021-06-28 07:19:59
、車載網絡、LED照明、動力總成、車身和主動安全方案。觀看此視頻,了解安森美半導體如何幫助汽車設計工程師和制造商解決創建連接的和無人駕駛汽車面臨的獨特挑戰。
2018-10-19 09:08:15
目前無人駕駛出現了兩種技術方向,一種是超級大腦類型,即從有人駕駛一步到無人駕駛的研究方向。另一種則是通過半自動駕駛逐步實現無人駕駛技術的研究路線。ADI公司汽車電子事業部大中華區市場總監許智斌先生
2017-02-22 16:07:56
自動駕駛還需要較長的路要走ADAS、自動駕駛、無人駕駛、智能汽車等詞語風靡科技圈,如果哪個智能硬件團隊或科技公司無法與這些關鍵詞建立關聯,頗有被世界遺棄之感。但是,如果客觀的去分析,真正意義上的自動駕駛尚有較長的路要走。
2020-05-07 06:59:06
既能夠實現自動泊車和自動保持車道,又可以為我們提供視野盲點的信息和警報,為什么目前全自動車輛還未成為行業標準呢?首先,目前處于試驗階段的無人駕駛車輛中的電子系統占據了汽車的大部分空間,而且其技術成本
2018-08-30 15:39:10
` 本帖最后由 anyhero 于 2016-6-7 20:50 編輯
各位技術大咖,我和朋友在上海,去年九三閱兵和朋友一起成立了無人駕駛研究小組(非營利性),希望可以做出一個借口全部打開的可控
2016-06-06 21:17:26
本文是無人駕駛技術系列的第十篇,著重介紹無人駕駛硬件平臺設計。無人駕駛硬件系統是多種技術、多個模塊的集成,主要包括:傳感器平臺、計算平臺、以及控制平臺。本文將詳細介紹這三個平臺以及現有的解決方案
2021-09-09 08:16:33
`無人駕駛系統是一個龐大而又復雜的系統工程,從物理結構上看,它分為硬件、操作系統、軟件、外設等幾個不同的部分。每一個部分的細分和辨別,甚至都是一個復雜的生態系統。硬件是這個系統工程的基礎,任何離開
2017-09-30 16:50:53
ADAS系統無人駕駛的眼睛毫米波雷達汽車已經進入無人駕駛探索階段,可以主動防護汽車駕駛安全的高級駕駛輔助系統(以下簡稱:ADAS)技術也正在逐步的完善。ADAS簡單來說就是讓汽車有感知系統,可感受
2023-04-18 11:42:23
:“為了滿足無人駕駛汽車的自動化和安全性方面的需求,一些應用程序不僅需要知道車子當前正處于哪條車道上,還需要知道車子在車道的哪個位置上,并且在車子行駛的過程中進行實時定位。”現在,全球定位系統主要通過衛星來計算
2017-10-16 11:04:26
申請理由: 我們團隊準備進行汽車的無人駕駛和語音智能系統開發,因為需要進行視頻和語音的高速處理,這里我們看中了TI的DSP。無人駕駛和語音操作是未來智能化的一個方向,這里正好正好利用廣州創龍的開發板
2015-09-10 11:08:15
最新曝光的這一個最為引人注目。蘋果在專利中描述了一套為自動駕駛汽車設計的VR系統,它可以大幅改變汽車的內飾和車內環境,為乘坐者帶來更多樂趣。圖1展示乘客佩戴VR頭顯觀看,而圖2展示的是通過AR技術把
2018-04-24 17:05:48
自動駕駛技術上經驗積累可以說是最為豐富的。去年奔馳就曾經展示過一款重型的無人駕駛卡車—Future Truck 2025。豐田投資10億開發人工智能輔助駕駛系統,在此基礎上,深入研究無人駕駛技術。美國
2016-06-24 14:28:03
,除了具備無人駕駛功能的傳統車輛外,汽車行業還將出現全新細分市場。在個人出行方面,消費者將有新選項可供選擇,以彌補公共交通的不足。而這些新的出行選擇將更多地利用電池供電以及其他高效的動力。” 該媒體
2016-06-13 14:55:19
本文是無人駕駛技術系列的第十篇,著重介紹無人駕駛硬件平臺設計。無人駕駛硬件系統是多種技術、多個模塊的集成,主要包括:傳感器平臺、計算平臺、以及控制平臺。本文將詳細介紹這三個平臺以及現有的解決方案
2021-09-09 07:37:47
席),第二段工作人員將車子倒回起點后,通過Mate 10 Pro上定制的App就能夠操控車子進行無人駕駛了,中間遇到障礙物車子都會自動避開繼續進行行駛。圖:華為無人駕駛體驗車輛。另外值得注意的是,高通公司在此
2018-03-19 11:50:24
2016亞太智能網聯汽車國際峰會暨展覽會 時間:2016年12月8-9日(周四至周五) 地點:上海嘉定 主題:從先進駕駛輔助系統到無人駕駛 峰會暨展覽介紹:作為新一代自動駕駛和信息網
2016-10-27 15:53:48
大組件定義整個汽車,即使是同一款汽車,在使用方式、風格、辨認方面都有多種配置方式。” OSVehicle模塊化無人駕駛汽車Edit由于采用模塊化技術,使得用戶可以輕松嵌入幾種無人駕駛技術,包括
2017-05-23 18:10:29
關于無人駕駛硬件平臺的解決方案,不看肯定后悔
2021-11-03 06:32:54
效應。 二、汽車智能化之路 基礎技術有待突破 成熟的無人駕駛汽車必須具有強大的單車智能及鏈接所有車輛的智能化網聯系統,這就需要汽車內部各個部位和車與車之間能實時、順暢的數據交換,汽車要實現這種目前
2016-06-21 16:21:14
基于光電導航的無人駕駛智能車下個月學校舉行這個智能車比賽,比在相同路段跑的時間,看到這個題目,沒有任何思路。。望高手指教下,原理圖,設計思路。。都可以!!謝謝~
2013-04-10 10:19:23
大家好,我最近在研究無人駕駛車輛的運動決策方法,請各位大神指教,qq1113185817
2018-04-26 15:12:29
如何實現無人駕駛硬件平臺的設計?
2021-11-02 09:29:23
如何構建一輛無人駕駛車呢?
2021-09-30 07:37:34
圖形顯示控制器(GDC)是位于車輛信息和娛樂系統中心的關鍵引擎,通常這些信息娛樂系統包括需要各類人機接口的頭端單元和全配置的各種儀器。開始為日本和歐洲市場上的高端車輛中的導航系統設計的圖形顯示控制器,現在已經出現在世界各地的各種型號的中檔乃至低端車輛中。在車輛的娛樂系統中也在采用。
2019-10-30 07:50:55
無人駕駛技術現如今其實非常成熟了,就以現在的技術水平看,如果把大城市復雜的交通狀況變成實驗室特定的格局,場景內有制式統一的車輛以及符合規矩的行人正常通行,那么不用方向盤,全程自動行駛的汽車當下就可以
2017-10-23 17:51:41
無人駕駛汽車在中國這個汽車高增長的國家是否能行得通呢?中國從2000年起到2010年按照十年計算,汽車的產量從200多萬輛上升到1000萬輛連續十年的時間超速增長了,有關業界人士表示,這是從有汽車
2015-01-09 10:45:11
機器學習算法如何用于制造無人駕駛汽車
2021-03-18 06:27:18
向知名激光雷達廠家Velodyne公司投資1.5億美元,進行激光雷達系統的研發和生產,從而加大無人駕駛技術的研發力……可以說,掌握了激光雷達系統的奧秘,就掌握了無人駕駛技術的命門,如果能在這場新時代的汽車產業革命中獲得先機,那么拿下入場未來駕駛的門票則不在話下。`
2017-10-20 15:49:06
的自動控制系統,它是在早已存在的巡航控制技術的基礎上發展而來的。在車輛行駛過程中,安裝在車輛前部的車距傳感器(雷達)持續掃描車輛前方道路,同時輪速傳感器采集車速信號。當與前車之間的距離過小時,ACC 控制
2017-10-18 17:18:24
感知技術,實現高精度車輛探測識別、跟蹤、距離和速度估計、路面分割、車道線檢測,為自動駕駛的智能決策提供依據。雖然百度無人駕駛汽車已經完成如此高難度的路測,但是這不是意味著百度無人駕駛汽車很快就能進入市場。目前,該領域還存在很多空白,如無人駕駛汽車行業的行業標準,無人駕駛汽車出現事故由誰負責等一系列問題。
2015-12-12 16:53:14
表示:完全的無人駕駛在5年之內實現,幾乎不大可能,而ADAS(高級駕駛輔助系統)是目前來說更為現實的選擇。在制造無人車的道路上,傳統汽車企業采用的是漸進式路徑,從基本的輔助駕駛、半自動駕駛,逐漸過渡
2017-02-07 14:58:38
前兩天,百度已經在北京完成路測,如今國外又傳來谷歌無人駕駛汽車的消息。12月14日,谷歌在過去的兩年里,不斷與英國***進行多次會談,希望能在英國推廣無人駕駛汽車。谷歌認為,無人駕駛汽車技術可以讓
2015-12-14 14:07:13
據彭博社報道,知情人透露,蘋果從黑莓的QNX項目挖走很多工程師,據說是為了研究無人駕駛汽車。蘋果無人駕駛系統包含一個AR抬頭顯示器,集成了可以用Siri控制的應用。
2016-10-26 11:46:39961 最近觀致汽車曝光了最新的概念車圖片,這款概念車是未來觀致汽車的研發方向:無人駕駛技術,這也是國產首個打造無人駕駛車輛的車企。
2016-12-22 16:41:35498 傳感器是無人駕駛車輛的關鍵部件。能夠監視車輛前方、后方或側面的距離,為中央控制器提供重要的數據。
2017-05-07 10:21:22 25
25 本文是無人駕駛技術系列的第三篇,著重介紹基于計算機視覺的無人駕駛感知系統。在現有的無人駕駛系統中,LiDAR是當仁不讓的感知主角。但是由于LiDAR的成本高等因素,業界有許多是否可以使用成本較低
2017-09-30 16:13:430 北京市相關政策出臺,不僅首次為無人駕駛做出了相關規定,也第一次為無人駕駛給出了官方定義。也讓自駕車上路終于名正言順,有了官方文件為依歸。文件定義指出:無人駕駛車輛是指在符合《機動車運行安全技術條件》(GB7258)的機動車上裝配無人駕駛系統的車輛。
2017-12-25 08:45:409733 無人駕駛汽車是智能汽車的一種,也稱為輪式移動機器人,主要依靠車內的以計算機系統為主的智能駕駛儀來實現無人駕駛的目標。無人駕駛汽車是通過車載傳感系統感知道路環境,自動規劃行車路線并控制車輛到達預定目標的智能汽車。
2017-12-25 10:04:5613031 
無人駕駛汽車又稱自動駕駛汽車、電腦駕駛汽車、或輪式移動機器人,是一種通過電腦系統實現無人駕駛的智能汽車。在20世紀也已經有數十年的歷史,于21世紀初呈現出接近實用化的趨勢,比如,谷歌無人駕駛汽車于2012年5月獲得了美國首個無人駕駛車輛許可證
2017-12-25 10:26:4090589 無人駕駛汽車是一種智能汽車,主要依靠車內的以計算機系統為主的智能駕駛儀來實現無人駕駛。它通過車載傳感器感知路面環境,并通過感知所獲得的道路、車輛位置和障礙物信息,控制車輛的轉向和速度,自動規劃行車路線從而使汽車到達預定目標。
2018-01-08 18:57:123403 專利文件顯示,以拍攝DIY科學視頻著稱的YouTube網紅馬克·羅博(Mark Rober)幫助蘋果開發了無人駕駛汽車虛擬現實(VR)娛樂系統。
2018-07-25 17:22:00523 2018年全球無人駕駛汽車消費者調查報告顯示,全球來看只有30%的人表示完全樂意使用無人駕駛汽車,而相當數量的人表示不會使用。對于無人駕駛的顧慮,一方面出于對安全的不信任,還有不少車主認為一旦普及了無人駕駛汽車,他們駕駛的樂趣會被剝奪。
2018-04-09 11:03:329505 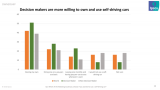
分享到 今天,蘋果和大眾聯合宣布將會共同研發無人駕駛,將把大眾的一款新T6Transporter車型打造成無人駕駛的蘋果職員班車。此前“閉門造車”處處碰壁的蘋果開始“內外聯合”,向外部車企尋求合作
2018-05-30 10:43:00794 虛擬現實市場遭遇了低迷,不過自動駕駛卻在全球風生水起。有趣的是,虛擬現實和自動駕駛正在產生一個交集,一些公司開始研發車載VR(虛擬現實)。據外媒最新消息,一份蘋果專利文件顯示,YouTube網紅馬克·羅博(Mark Rober)正在幫助蘋果開發無人駕駛汽車虛擬現實(VR)娛樂系統。
2018-11-27 15:19:49778 全球最大的消費電子展CES 2019正式舉行,在展會中,日本豐田(TOYOTA)汽車在展臺中使用VR結合其最新的無人駕駛汽車,演示了未來無人車中的娛樂生活。
2019-01-20 09:51:001861 蘋果內憂外困,切掉無人駕駛能否自救?
2019-01-25 09:30:42688 基于本人對無人駕駛系統的理解,對無人駕駛系統的軟件架構進行分層,大致分別以下3層:感知層、決策層與控制層。
2019-07-08 10:09:045781 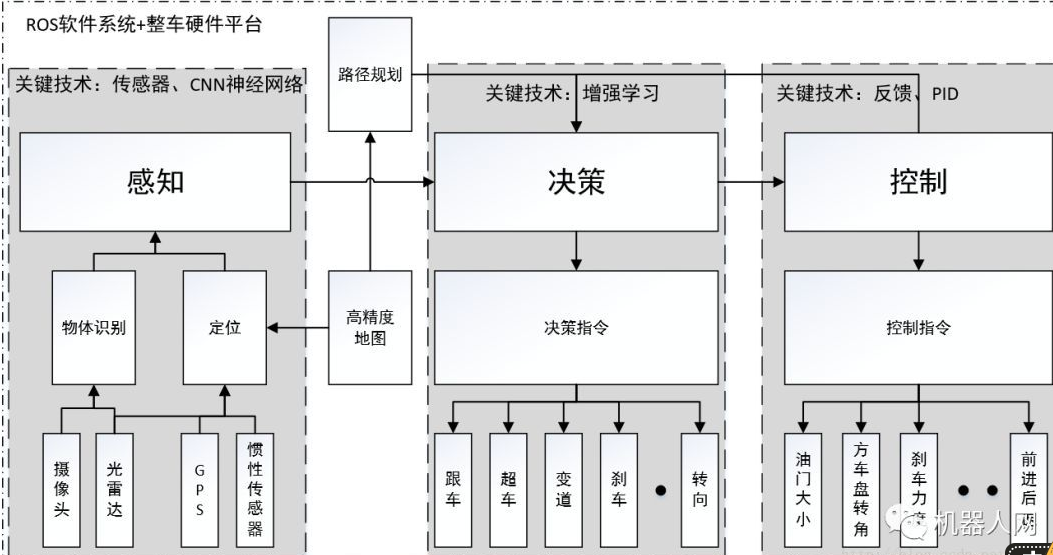
未來,一輛無人駕駛汽車在90分鐘之內就會產生4TB的數據量,這些數據可以幫助汽車了解周圍環境,讓車輛可以安全行駛在復雜的道路上。如果沒有車內人工智能利用機器視覺和深度學習實時對數據加以分析,無人駕駛汽車就很難輕松上路。但這類人工智能負載通常需要消耗非常多的電力,并且難以在車內有限的功率下運行。
2019-09-10 08:50:421593 包括英特爾在內的各大芯片廠商紛紛推出相應的解決方案,顯示自家芯片在提升汽車無人駕駛、車內通訊、媒體信息娛樂系統和車輛之間連接等方面的強大性能。畢竟對于智能汽車領域的玩家來說,決定車輛系統智能與安全性的車載芯片才是智能的基礎;而對“無人駕駛”的性能支持,則是對目前車載芯片性能強大與否的最佳注腳。
2019-09-19 15:43:251755 馭勢科技的展示大廳同時展出無人駕駛多功能電動車和帶有自動駕駛系統的燃油車,它們都是無人駕駛平臺規劃的組成部分。
2019-09-20 15:33:501973 AHRS航姿系統在無人駕駛的應用 無人駕駛車輛執行的任務日益復雜,這就要求無人駕駛車輛越來越強大、并且要有更準確的航向、方位信息。但現有的航向姿態檢測傳感器模塊受到多種因素的影響。當遇到磁性失真
2020-04-26 15:08:30728 本文主要闡述了無人駕駛汽車的功能及無人駕駛汽車構造。
2020-09-01 15:47:299355 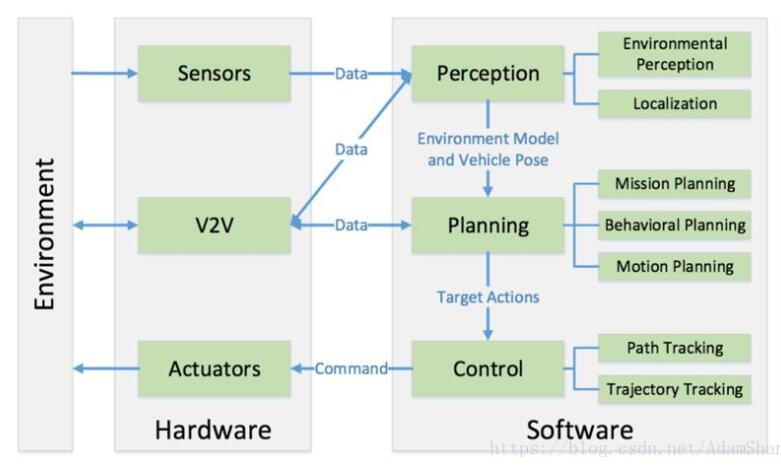
。 這項專利應該是為了給未來無人駕駛汽車所準備的,用戶可以通過該專利中所描述的設備在無人駕駛的汽車上完成工作或是進行各種娛樂活動。 常規的VR設備沒有辦法區分用戶的運動是實際身體運動還是外力形成的位移,所以在告訴行駛的
2020-10-20 11:22:531550 近日,Zoox公司發布了一款可以搭載四人的無人駕駛出租車車型“robo-taxi”。 據介紹,該車型為緊湊型轎車,專為密集的城市環境設計。車輛內部看起來像傳統馬車,有兩排座椅,乘客相對而坐;內部沒有
2020-12-25 14:34:332040 無人駕駛系統的核心可以概述為三個部分:感知(Perception),規劃(Planning)和控制(Control),這些部分的交互以及其與車輛硬件、其他車輛的交互可以用下圖表示。
2022-12-08 09:20:07977 電子發燒友網站提供《無人駕駛車輛開源分享.zip》資料免費下載
2022-12-19 10:34:530 無人駕駛汽車在實現自主駕駛的過程中面臨。著許多安全挑戰,如環境感知不準確、障礙物識別錯誤、路徑規劃不合理、系統故障等。這些安全問題可能導致無人駕駛汽車出現車輛故障甚至失控等情況,引起交通事故,會對人們的生命財產造成威脅,同時也會影響無人駕駛汽車技術的普及和應用。
2023-10-16 11:21:28215 
無人駕駛汽車是一種智能汽車,也可以稱之為輪式移動機器人,主要依靠車內的以計算機系統為主的智能駕駛儀來實現無人駕駛。無人駕駛汽車是通過車載傳感系統感知道路環境,自動規劃行車路線并控制車輛到達預定目標的智能汽車。
2023-10-16 11:26:38822 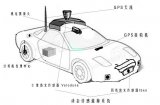
1.1 無人駕駛車輛 大到類似百度apollo無人車,無人配送車,小到掃地機器人,其實都是無人駕駛車輛。都是一個復雜的軟硬件結合系統,其軟件算法模塊主要包含:感知、定位、軌跡預測、行為決策、運動規劃
2023-11-15 16:00:15243 車聯網技術。無人駕駛路由器5G路由器具備低時延的特點,可以實現車與車之間、車與基礎設施之間的快速通信。對于無人駕駛來說,時延的減少可以提高車輛之間的反應速度,從而
2024-02-19 11:48:14294 
 電子發燒友App
電子發燒友App


















 工商網監
工商網監
評論