 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻TMPM370無(wú)傳感器BLDC馬達(dá)的矢量控制的應(yīng)用手冊(cè)資料免費(fèi)下載
資料介紹
1 馬達(dá)控制
馬達(dá)控制執(zhí)行流程如圖 1所示。
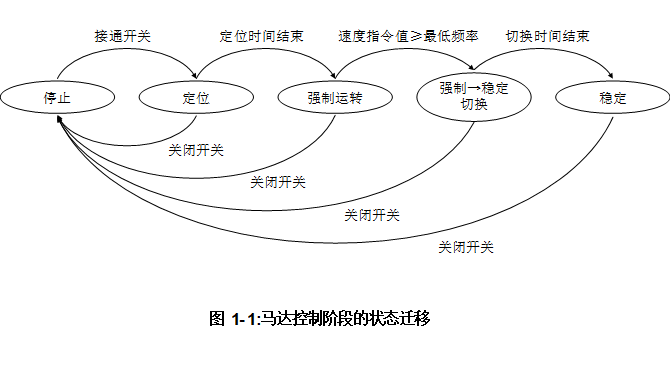
馬達(dá)控制具有圖1所示的5個(gè)控制階段。要啟動(dòng)馬達(dá)使其穩(wěn)定運(yùn)轉(zhuǎn),需要依次進(jìn)行各階段操作。
即停止(Stop)階段、定位(Initposition、也稱(chēng)作直流勵(lì)磁)階段、強(qiáng)制運(yùn)轉(zhuǎn)(Force)階段、強(qiáng)制→穩(wěn)定轉(zhuǎn)換(Change_up)階段、穩(wěn)定(Steady_A)階段。各個(gè)階段的處理,需要實(shí)施與該階段相對(duì)應(yīng)的控制。
停止(Stop)階段時(shí),馬達(dá)停止。
定位(Initposition、也稱(chēng)作直流勵(lì)磁)階段時(shí),電流流經(jīng)馬達(dá)線圈使鐵芯處產(chǎn)生磁通量,將轉(zhuǎn)子的位置固定于0點(diǎn)附近。位置確定完成后,進(jìn)入下一階段。
強(qiáng)制運(yùn)轉(zhuǎn) (Force)階段時(shí),轉(zhuǎn)子開(kāi)始旋轉(zhuǎn)。該階段并非進(jìn)行矢量控制反饋處理,而是強(qiáng)制地加入旋轉(zhuǎn)磁場(chǎng)、轉(zhuǎn)子追隨該旋轉(zhuǎn)磁場(chǎng)進(jìn)行旋轉(zhuǎn)。角速度指令值達(dá)到最低頻率時(shí),進(jìn)入下一階段。
強(qiáng)制→穩(wěn)定的切換(Change_up)階段時(shí),馬達(dá)進(jìn)行從強(qiáng)制運(yùn)轉(zhuǎn)切換至穩(wěn)定狀態(tài)的處理。使馬達(dá)配合轉(zhuǎn)子的位置進(jìn)行轉(zhuǎn)動(dòng)(原本馬達(dá)旋轉(zhuǎn)與轉(zhuǎn)子位置無(wú)關(guān))。強(qiáng)制到穩(wěn)定切換完成后,進(jìn)入下一階段。
穩(wěn)定(Steady_A)階段時(shí),按照轉(zhuǎn)子位置和馬達(dá)目標(biāo)旋轉(zhuǎn)速度進(jìn)行驅(qū)動(dòng)。
1 矢量控制的原理
無(wú)傳感器BLDC 馬達(dá)的矢量控制方框圖與各方框處的處理如下。
W經(jīng)速度控制轉(zhuǎn)換成對(duì)Id_ref和 Iq_ref的設(shè)定(Id_ref=0,q軸電流每次都在被調(diào)節(jié))?

- BLDC電機(jī)的無(wú)傳感器梯形控制
- 永磁無(wú)傳感器矢量控制同步電動(dòng)機(jī)應(yīng)用指南
- 永磁無(wú)傳感器矢量控制同步電動(dòng)機(jī)應(yīng)用指南
- 異步電機(jī)無(wú)速度傳感器矢量控制學(xué)習(xí)
- STM32在馬達(dá)控制中的應(yīng)用 1次下載
- 用于超高效電機(jī)控制的無(wú)位置傳感器矢量控制技術(shù)
- 基于DSP的感應(yīng)電機(jī)無(wú)速度傳感器矢量控制系統(tǒng) 18次下載
- TMPM370無(wú)傳感器BLDC電機(jī)驅(qū)動(dòng)的控制方法和電路等資料詳解 73次下載
- 基于非線性磁鏈動(dòng)態(tài)模型的無(wú)速度傳感器矢量控制系統(tǒng)_劉和平 0次下載
- 基于單元串聯(lián)的無(wú)速度傳感器矢量控制算法研究_黃哲 0次下載
- 基于DSP的異步電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)的研究與實(shí)現(xiàn) 23次下載
- 無(wú)速度傳感器矢量控制原理與實(shí)踐_第2版_電氣自動(dòng)化新技術(shù) 0次下載
- 基于MATLAB的無(wú)速度傳感器矢量控制仿真
- 基于MRFAS模型的感應(yīng)電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)
- 基于PLC分級(jí)遞階分布式控制的無(wú)速度傳感器矢量控制調(diào)速系統(tǒng)
- 無(wú)刷直流電機(jī)矢量控制技術(shù)詳解 1724次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [完結(jié)篇] 評(píng)估環(huán)境說(shuō)明 (2) 425次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [6] 評(píng)估環(huán)境說(shuō)明 (1) 400次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [5] 控制程序描述 (3) 371次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [4] 控制程序描述 (2) 453次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [3] 控制程序描述 (1) 406次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [2] 系統(tǒng)概述 394次閱讀
- RA6T2無(wú)傳感器矢量控制應(yīng)用筆記 [1] 概述 482次閱讀
- BLDC的無(wú)感控制方法 3827次閱讀
- BLDC馬達(dá)控制器MTD6505的主要特性及電路應(yīng)用方案 3307次閱讀
- 一種基于兩相旋轉(zhuǎn)坐標(biāo)系的高壓變頻器無(wú)速度傳感器矢量控制設(shè)計(jì) 1819次閱讀
- 矢量控制與V/F控制詳解 4.6w次閱讀
- 矢量控制的基本原理介紹 7.1w次閱讀
- 基于PSoC 4的無(wú)傳感器BLDC控制 2879次閱讀
- 致力低成本應(yīng)用,DSC助臂無(wú)傳感器BLDC控制 4108次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1OAH0428最新規(guī)格書(shū)(中文)
- 2.52 MB | 27次下載 | 10 積分
- 2UHV系列雷電沖擊電壓發(fā)生器試驗(yàn)裝置詳細(xì)說(shuō)明使用
- 1.07 MB | 16次下載 | 免費(fèi)
- 3麻將機(jī)升降電路
- 0.12 MB | 5次下載 | 1 積分
- 4PNE20040CPE-Q雙共陰極超快恢復(fù)整流器規(guī)格書(shū)
- 275.16KB | 4次下載 | 免費(fèi)
- 5AC6951C功放30W彩燈電路
- 0.19 MB | 2次下載 | 2 積分
- 6TK8620 開(kāi)發(fā)板-TKB-620
- 410.54 KB | 2次下載 | 免費(fèi)
- 7RS-485收發(fā)器CMT83086的高可靠性全雙工隔離特性及其應(yīng)用
- 888.28 KB | 2次下載 | 免費(fèi)
- 8NX-HB-GAN3R2-BSC半橋評(píng)估板
- 4.52MB | 1次下載 | 免費(fèi)
本月
- 1DeepSeek:從入門(mén)到精通
- 5.36 MB | 60次下載 | 1 積分
- 2OAH0428最新規(guī)格書(shū)(中文)
- 2.52 MB | 27次下載 | 10 積分
- 3UHV系列雷電沖擊電壓發(fā)生器試驗(yàn)裝置詳細(xì)說(shuō)明使用
- 1.07 MB | 16次下載 | 免費(fèi)
- 4麻將機(jī)升降電路
- 0.12 MB | 5次下載 | 1 積分
- 5中興通訊的PCB設(shè)計(jì)規(guī)范
- 23.03 MB | 5次下載 | 5 積分
- 6Altium-常用3D封裝庫(kù)(Step)接插件篇
- 4.95 MB | 4次下載 | 免費(fèi)
- 7HBS2268 PWM的電流型開(kāi)關(guān)電源控制器中文手冊(cè)
- 1.47 MB | 4次下載 | 免費(fèi)
- 8PNE20040CPE-Q雙共陰極超快恢復(fù)整流器規(guī)格書(shū)
- 275.16KB | 4次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935124次下載 | 10 積分
- 2開(kāi)源硬件-PMP21529.1-4 開(kāi)關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191370次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81582次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73813次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論