 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
這個項目將指導你從頭到尾構建這個機器人,如果不夠詳細,請給我留言,我有空時會更新項目。
制造這輛車后你將學到什么:
- 步進電機的工作原理以及如何在沒有庫的情況下手動向步進電機發送信號。
- 如何同時旋轉多個步進電機。
- 將 arduino 數字引腳分配擴展到無限制的引腳數 :)
- 在 c++ 中使用類和指針的一些技術。
第 1 部分:組裝車身
這輛車的設計很簡單,如果你有一臺 3d 打印機,那么你可以分開打印部件(這是在 220x220 3d 打印上打印的設計),如果你沒有,你可以用丙烯酸樹脂和手工工具制造它.
組裝車輪:
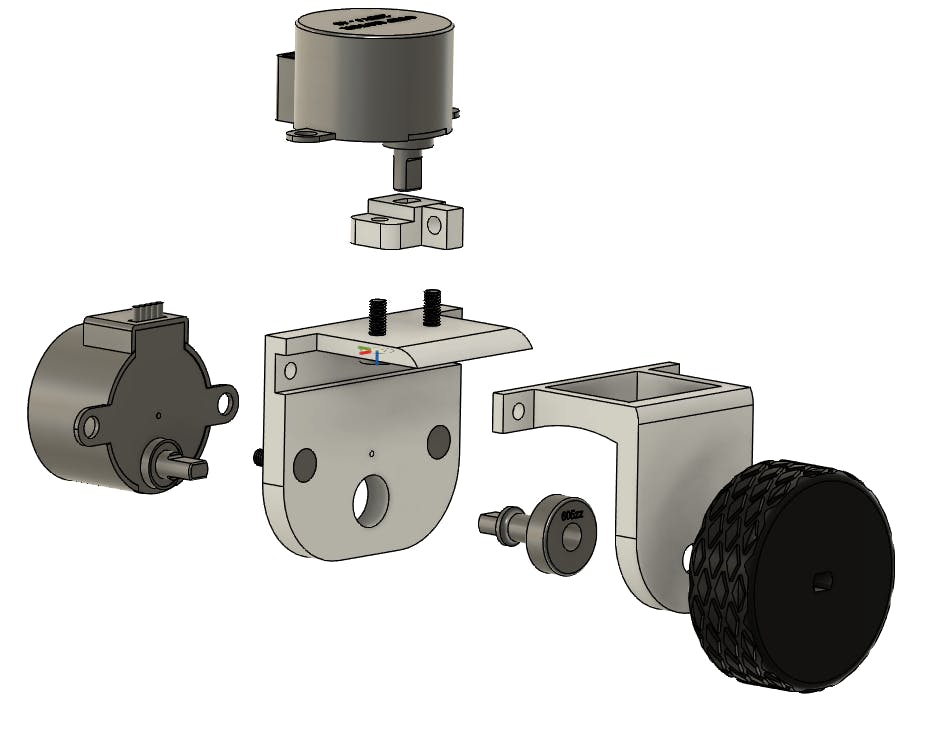
車輪尺寸為 40 毫米,您應該購買一些具有橡膠的相同直徑的車輪,取出橡膠并組裝到該車輪上,或者您可以使用該車輪進行一些修改以適應汽車。
組裝垃圾箱:
垃圾箱到地面的距離約為 5 毫米,我建議你購買硅膠來連接底部垃圾,比如這個:
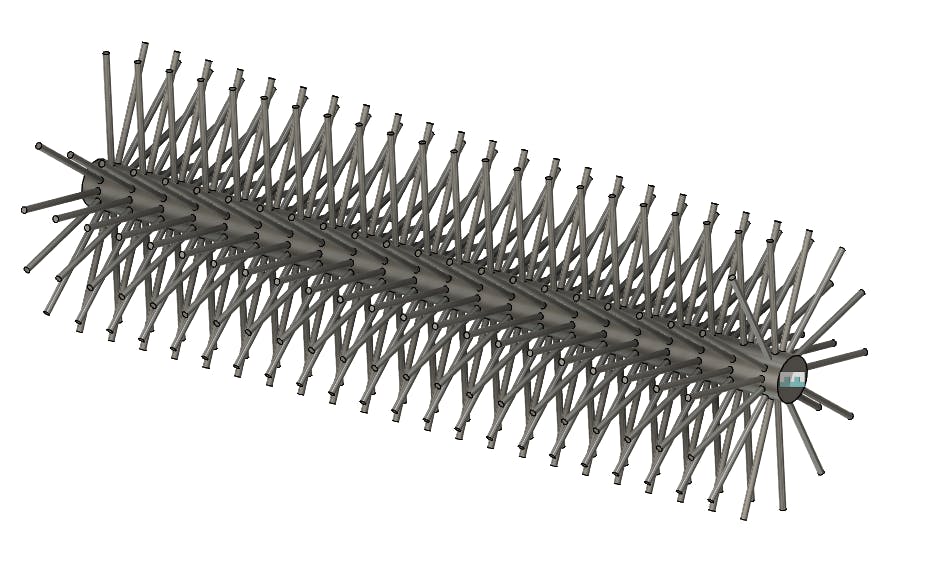
組裝清潔棒:
只需在桿上鉆孔并使用 502 膠水,如果您有 3D 打印機,則更容易。
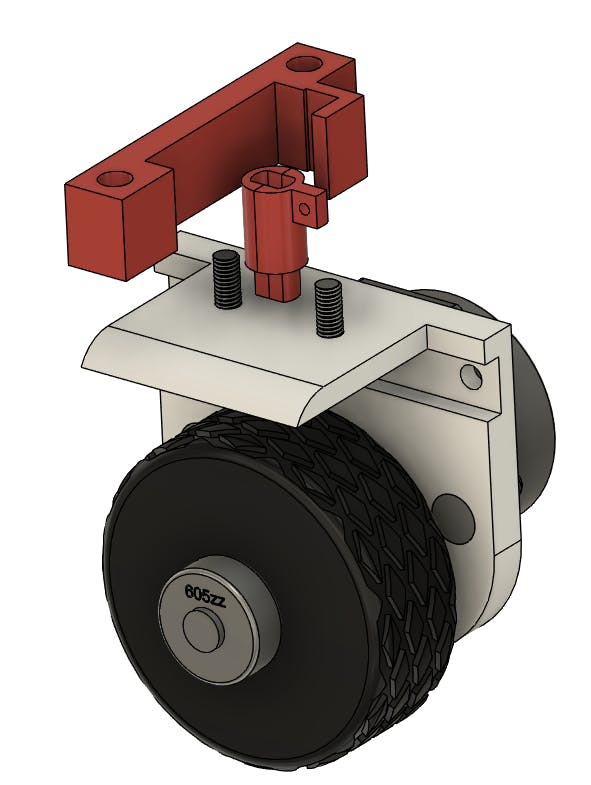
可選:這輛車被設計為使用傳感器,但如果你想使用物理切換圖片中紅色的工藝添加項目,
第 2 部分:電氣接線
這是電氣設計:https://oshwlab.com/tungbuivn/home-cleaner-bot
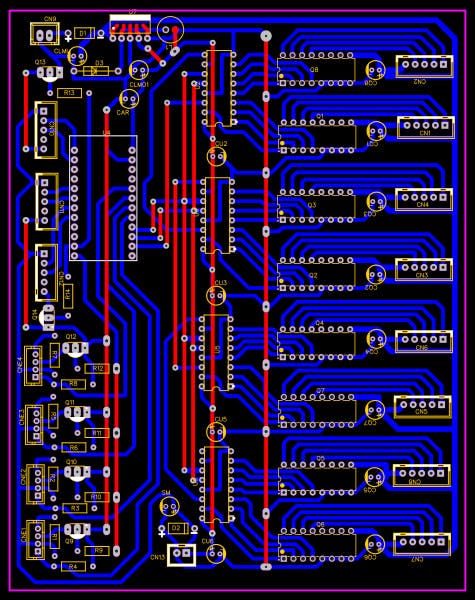
印刷電路板:
組件和說明:
工作原理:電源通過二極管和 uln2003 為步進電機提供電源,所有其他電源將通過 lm2596 為其余電氣元件提供 5v。
成分及原因:
為什么要使用步進電機?是的,使用步進電機將使您能夠以您想要的準確角度控制汽車旋轉輪,距離相同,您可以準確地移動汽車。但正如您在上面的短視頻中看到的那樣,速度很慢,28byj-48 的最大轉速為 15rpm,視頻中的速度為 7rpm。
lm2596:我用這個代替lm7805,因為如果你將傳感器連接到endstop,電路會消耗更多的電量,lm7805會很快變熱,無論它以500ma運行,但lm7805比lm2596更穩定,使用lm7805或lm2596取決于你的決定:)
原理圖中的每個uln2003都有空閑的3pin,為什么不使用呢?是的,你可以試著給它接線,但我的,似乎 uln 2003 不能提供足夠的功率來驅動電機。
傳感器終點站設計為使用 IR-LED 和光電二極管,但您可以將 LDR 與激光燈一起使用,或者您認為它應該工作的任何東西。您可以搜索 hackster 以查找有關使用 IR-LED 和光電二極管的更多信息
Arduino 引腳連接:
D2-D7:這將連接到 SRF05 傳感器,這是汽車的眼睛。
D9 (PE1) : 送高電平信號給傳感器供電,送低電平切斷
A0-A3 (E1,E2,E3,E4):end-stop 的信號將發送到此引腳以通知 end-stop 狀態。
D11-D13:此引腳用于控制 74HC795
頭針連接:
CN9:這是電源12V
CN10,CN11,CN12 用于連接 SRF05 或 SRF04 傳感器
CNE1,CNE2,CNE3,CNE4 用于連接步進電機的末端停止
CN13 用于連接直流 5v 電機進行清潔工作
CN1、CN2、CN3、CN4、CN5、CN6、CN7、CN8 用于連接步進電機。
銑削PCB :
pcb 設計為 2 層,但您可以用 1 層銑削它并將連接線焊接到另一側。
如果您選擇在孔 PCB 上焊接,它會更大更復雜:)
第 3 部分:編寫代碼來控制汽車
應用結構:
我們的主要汽車對象將包含幾個子類,包括:
Driver Engine:將包含驅動汽車的代碼,driver 將包含所有的車輪和眼睛,它將處理旋轉和移動,例如:如果您想像現實世界的汽車一樣移動汽車,那么您將實現 driver 來控制車輪。該對象還包含車輪歸位位置的代碼。在我的源代碼中,我實現了全輪驅動引擎,如果你想控制真車,你需要實現其他類的前輪或后輪,但它更難,你需要一些知識汽車轉向計算用于驅動汽車的每個車輪的旋轉角度。
眼部經理:這輛車有三只眼睛,所以我們需要控制我們當時想用哪只眼睛,需要決定下一步要去哪里。
A:清潔機器人
我們的機器人會從 zizac 線開始打掃房間,在線結束后它會找到向左移動的路,如果找不到路則清潔完成。如果它可以左轉,那么它將設置下一個目標方向為右并重新啟動循環清潔。這很簡單,對吧?:D
B:映射機器人
這還沒有實現,但如果你想做一個,這里有一些建議。
我們知道的第一件事是:
在您打開汽車時,它的位置將是 (x,y)=(0,0) 并且無論汽車移動或左轉或右轉,您總是有它移動的距離和旋轉角度,即意味著您始終擁有汽車的坐標,因此,我們擁有我們稱之為 FreePoints 的積分集合
任何汽車改變它的方向,這意味著我們將計算前方的坐標,阻止汽車移動,所以我們有第二組點,我們稱之為 WallPoints。
從上面的兩組數據中,您將使用 delaunay 算法從 FreePoints 和 WallPoints 構建房間的平面,因此理論上,您可以隨時將汽車從任何點移動到任何目的地點。
如果您已經擁有房間地圖,您將需要參考一些尋路算法(例如 NPC 可以在游戲中從 A 移動到 B :))來控制汽車。
這是一些參考代碼,它很小
https://github.com/mapbox/delaunator
?
- Arduino機器人
- Roombot:房間清潔機器人
- 基于Arduino UNO的房間清潔機器人Roombot 1次下載
- Arduino機器人螞蟻
- 基于Arduino系統拉線墻畫機器人設計制作 12次下載
- 魔方機器人(三)Arduino
- 基于機器人和RFID設備的電網倉庫物品管理 41次下載
- 多軸機器人和機床中的時序挑戰綜述 11次下載
- 機器人和軟件人協同智能仿真方法與技術研究 39次下載
- 使用并聯機器人和機器視覺技術實現自動分揀機器視覺軟件系統的設計 26次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- Arduino開發機器人經典書籍推薦Arduino開發實戰指南:機器人卷
- 飛機外倉清潔機器人的設計 0次下載
- 直角坐標機器人和關節機器人的特性及應用對比 0次下載
- 人和機器人握手的同步控制
- 泳池清潔機器人的EMC問題整改案例 1652次閱讀
- 光伏組件智能清潔機器人設計方案 2730次閱讀
- 如何使用Arduino制造一個自動平衡機器人 4833次閱讀
- 使用Arduino實現映射功能的過程 5023次閱讀
- 基于用于檢測障礙物的傳感器的3D打印清潔機器人 2199次閱讀
- 基于LPC2210微處理器實現清潔機器人控制系統的設計 1826次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2236次閱讀
- 真空潔凈機器人 6354次閱讀
- 點焊機器人和弧焊機器人特點 5094次閱讀
- 如何實現ABB機器人和視覺系統進行通訊詳細教程和方法說明 2.9w次閱讀
- 如何區分機器人、協作機器人和移動機器人? 7029次閱讀
- 視覺導向的機器人和無人機可編程SoC設計 928次閱讀
- 小米掃地機器人和科沃斯哪個好_小米和科沃斯、iRobot對比 14.4w次閱讀
- 掃地機器人好用嗎?掃地機器人品牌排名? 1238次閱讀
- 在軟件測試行業中機器人和人工智能到底承擔著什么重任 2398次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論