 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
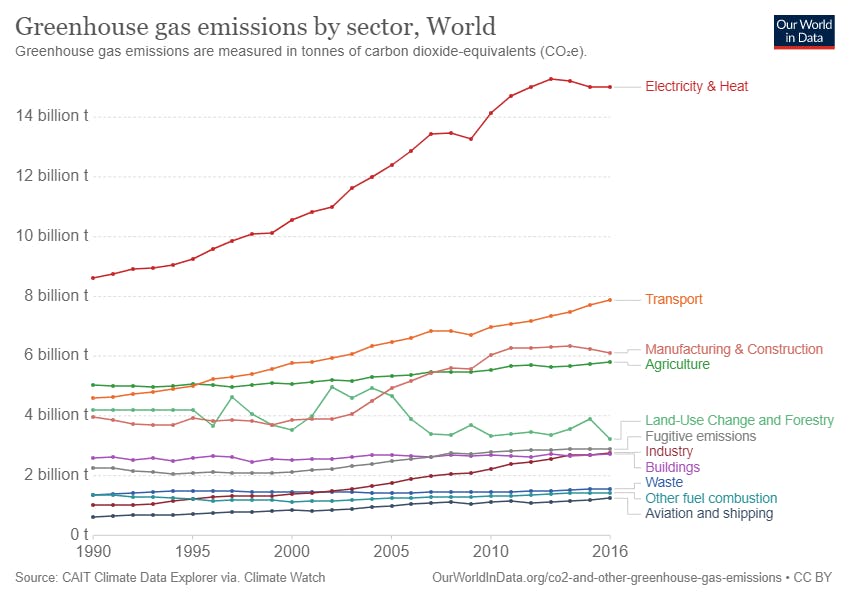
人類是自私的,消耗地球上所有的資源并不斷地破壞它,導(dǎo)致氣候變化等負(fù)面后果,導(dǎo)致全球變暖,蜜蜂和鳥類等物種的數(shù)量顯著下降。
目前,物流從生產(chǎn)者到消費(fèi)者的工作方式,占用了大量的運(yùn)輸。其中大部分是在平均效率為 20% 的內(nèi)燃機(jī)上運(yùn)行的車輛的幫助下完成的。與使用可再生資源的任何其他交通工具相比,這要少得多。這是二氧化碳排放的主要原因。這種二氧化碳排放導(dǎo)致全球變暖和氣候變化。為什么我們不轉(zhuǎn)向太陽能、風(fēng)能、水電等可再生能源或核能等清潔能源?在使用汽油/柴油作為能源很容易的情況下,它們需要大量投資和前期成本。
電動(dòng)汽車的主要問題是里程焦慮。人們擔(dān)心如果充電結(jié)束或電池爆裂怎么辦等。如果我們開發(fā)一種快速為電池充電的技術(shù)并戰(zhàn)略性地部署充電網(wǎng)絡(luò),那么未來至少在發(fā)展中使用電動(dòng)汽車會(huì)很容易。國家。
來到我們的解決方案:貨物的最后一英里交付對于任何組織都非常重要,因?yàn)樗桥c客戶互動(dòng)的最后一部分。如果交貨無憂,客戶將再次訂購,希望得到良好的服務(wù)。但大多數(shù)時(shí)候情況并非如此,快遞員弄亂了位置,然后我們應(yīng)該與他溝通當(dāng)前位置,否則包裹將被重新路由到另一個(gè)快遞辦公室,而客戶在包裹辦公室后面跑到辦公室。所有這些都涉及不必要的車輛移動(dòng),導(dǎo)致二氧化碳和一氧化碳?xì)怏w的排放。
使用自動(dòng)電動(dòng)送貨車是最好的選擇,像nuro這樣的公司已經(jīng)在研究它,這是一件非常好的事情。亞馬遜等巨頭正在開發(fā)基于無人機(jī)的送貨服務(wù),這將幫助我們顯著減少排放。多旋翼飛機(jī)或俗稱的無人機(jī)或四軸飛行器可以成為最后一英里貨物交付的潛在替代品。由于路線雜亂無章,多個(gè)送貨代理到達(dá)同一地點(diǎn),送貨車輛管理不善,貨物的最后一公里運(yùn)輸本身需要大量能源。無人機(jī)交付可以成為相同的潛在替代品。
但是自動(dòng)送貨車和無人機(jī)都需要經(jīng)常充電,而且它們的電池可能不會(huì)持續(xù)很長時(shí)間。特別是在四軸飛行器和多旋翼的情況下,每個(gè)電機(jī)的轉(zhuǎn)速大約在 5000 到 10000 之間,具體取決于電機(jī)的 KV。每個(gè)電機(jī)的功耗在 100 到 300W 之間變化。因此電池只能運(yùn)行 30 分鐘到 1 小時(shí)。但在這段時(shí)間內(nèi),根據(jù)有效載荷和電池容量,無人機(jī)可以飛行 50 到 60 公里。但是,由于可伸縮的空中距離而不是道路距離,無人機(jī)可以更快地到達(dá)該地點(diǎn)。
但您可能會(huì)想,為什么不能添加更大的電池?但是更大的電池反過來會(huì)增加重量,從而減少飛行時(shí)間。因此,最佳有效載荷以及高效電池是唯一的解決方案。
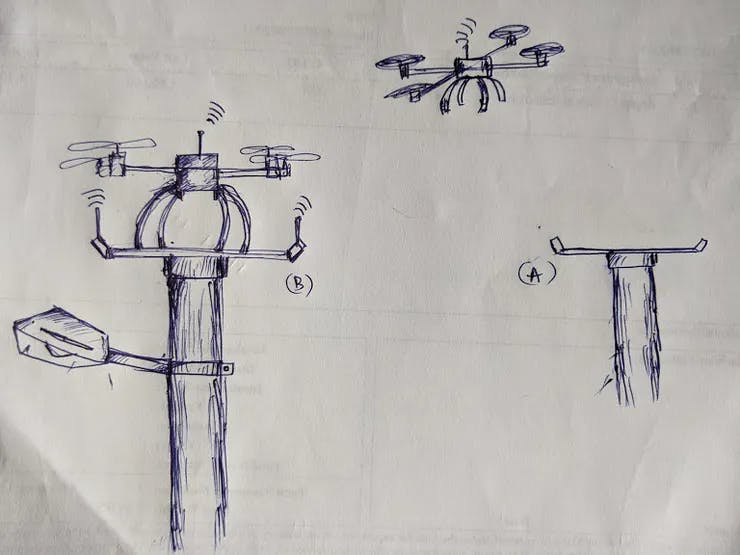
為了解決這個(gè)問題,我們建議無人機(jī)和自動(dòng)送貨車輛使用自動(dòng)充電站,它們可以自行充電并從那里起飛。在無人機(jī)的情況下是鳥巢,在 UGV 或無人駕駛地面車輛的情況下是車庫。但是需要仔細(xì)觀察和維護(hù)無人機(jī)和 UGV,以充分利用它們
在無人機(jī)中,由于其部件以如此高的 RPM 移動(dòng),如果只有一個(gè)稍微松動(dòng)的螺釘就會(huì)因?yàn)楦咚匐姍C(jī)的振動(dòng)放大而造成災(zāi)難。快速基于羽毛的 SAAS 解決方案將用于檢測這些微小的缺陷,并在無人機(jī)從一個(gè)充電器跳到另一個(gè)充電器時(shí)定期提醒它們。
這種主動(dòng)預(yù)測性維護(hù)也可用于 UGV,以檢測其他方式無法檢測到的異常情況。我知道上面的解釋很長,但很需要說明我的觀點(diǎn)。
讓我們開始吧:
第 1 步:獲取所需的東西
獲取所有需要的東西,例如快速羽毛、樹莓派 4、BLDC 電機(jī)、木板、烙鐵等。
第 2 步:快速羽毛入門
這是一個(gè)精彩的博客是由Arduino"have11"Guy寫的關(guān)于這個(gè)主題的請參考那個(gè)并準(zhǔn)備好基本的東西
第 3 步:訓(xùn)練數(shù)據(jù):

我計(jì)劃將設(shè)備連接到無人駕駛無人機(jī)充電器的情況下無人機(jī)來和著陸的充電板上,并且在 UGV 的情況下充電時(shí),SAAS 設(shè)備將保留在 UGV 本身上。這些充電站最好的一點(diǎn)是它們依靠太陽能運(yùn)行,通過它我們將實(shí)現(xiàn)零碳足跡的目標(biāo),從而阻止最后一英里運(yùn)輸車輛的排放。此外,由于這些安裝在路燈頂部,因此不會(huì)占用任何空間。
SASAS 設(shè)備將運(yùn)行診斷程序并檢查缺陷,例如
1. 螺旋槳損壞
2. 螺絲松動(dòng)
3. 不平衡螺旋槳
4. 損壞的框架
5、斷線

損壞的螺旋槳損壞是危險(xiǎn)的,因?yàn)槿魏我?10000 RPM 運(yùn)行的偏心質(zhì)量都可能是致命的武器。當(dāng)無人機(jī)在空中飛行時(shí),它可能會(huì)掉落并損壞人員,甚至可能由于高速剃須刀鋒利的螺旋槳葉片而造成生命損失。
它會(huì)將它們標(biāo)記為異常,并將其上傳到儀表板中。
充電狀態(tài)也可以共享到云端,標(biāo)記充電器墊忙碌。
我嘗試通過 IMU 傳感器(即 MC3635)收集數(shù)據(jù),但不幸的是,我的 IMU 提供恒定輸出并且它的值沒有變化,就像這樣,我設(shè)法通過將 I2C0 輸出連接到 Arduino Mega 板和通過訪問傳感器的 I2C 地址(0x44h)將數(shù)據(jù)讀取到串行端口
Sensor sniff.
Get interrupt.
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
---------------------------------------------------------
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
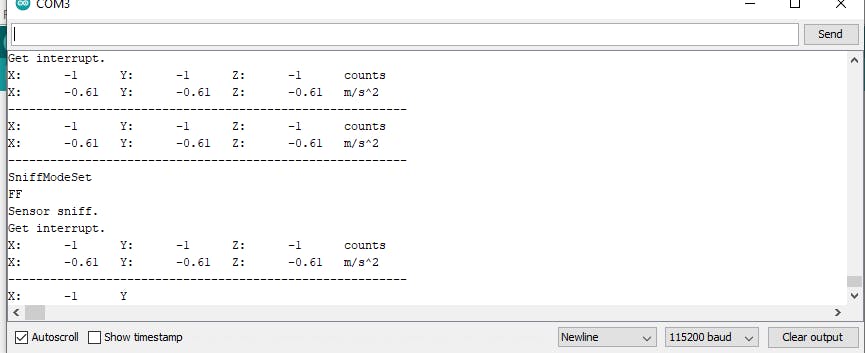
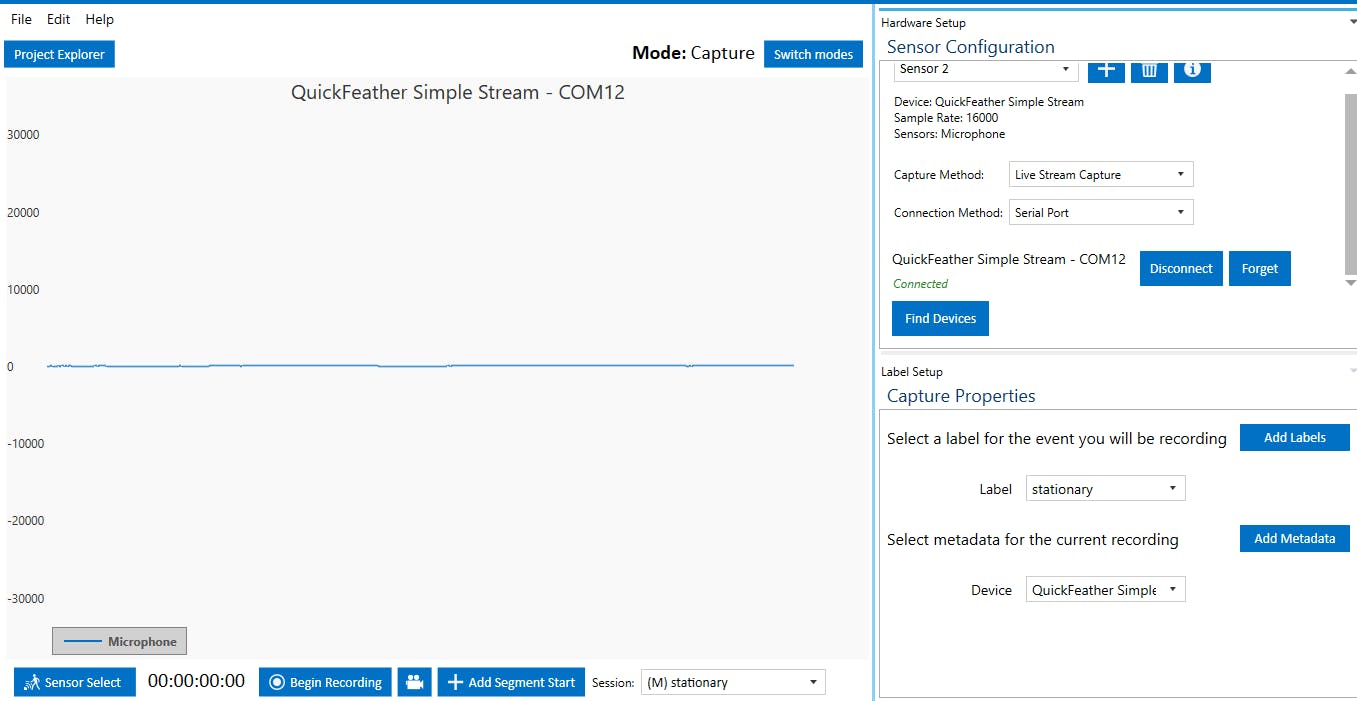
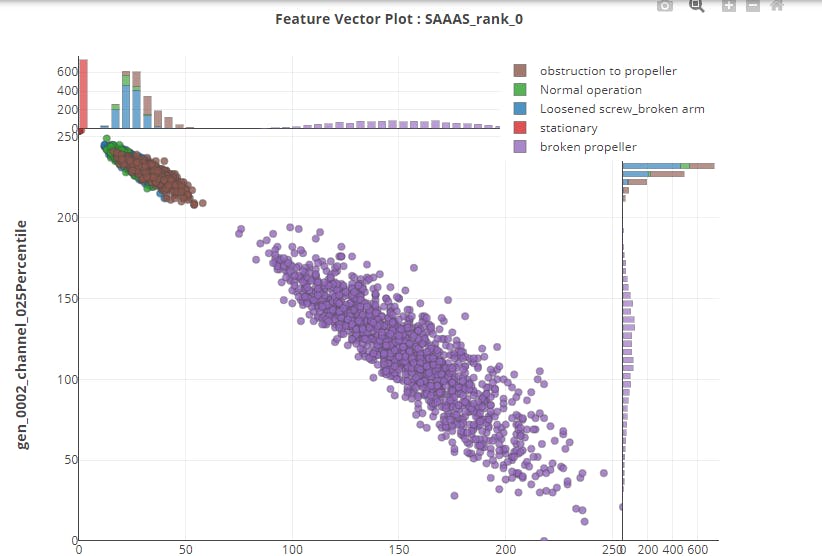
所以我只能選擇使用麥克風(fēng)來捕捉無人機(jī)葉片聲音中的異常情況。所以我通過串行固件加載了簡單的流音頻,然后啟動(dòng) DCL 通過串行本身收集數(shù)據(jù)。
由于印度的 Covid 19 大流行,我不得不從工作場所班加羅爾趕往家鄉(xiāng)。因此,除了少數(shù)開發(fā)板之外,沒有任何硬件。
因此,我將使用快速羽毛板和用于模擬無人機(jī)風(fēng)扇的計(jì)算機(jī)風(fēng)扇來模擬整個(gè)設(shè)置
現(xiàn)在我訓(xùn)練了模型并得到了結(jié)果
第 4 步:測試模型
我已經(jīng)上傳了測試數(shù)據(jù)并對其進(jìn)行了分類,現(xiàn)在我可以使用這些數(shù)據(jù)在分析工作室本身上測試我的模型。
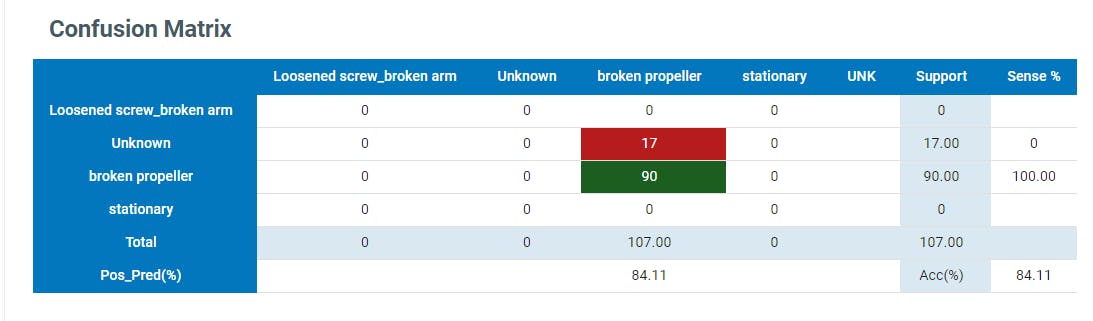
混淆矩陣在這里顯示了一個(gè)很好的數(shù)字。
第 5 步:工作視頻和演示:
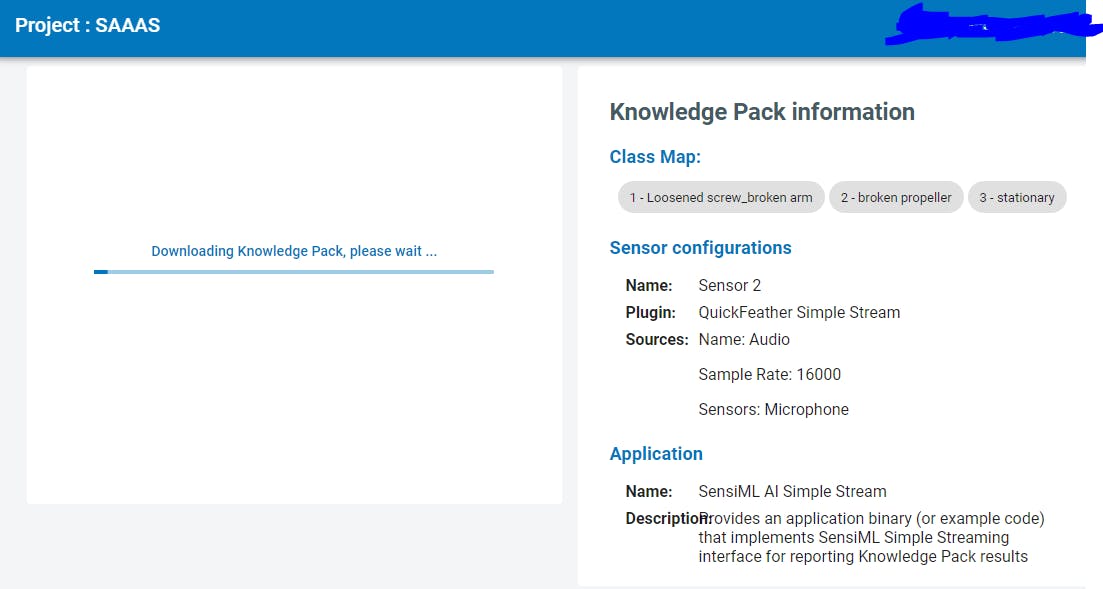
根據(jù)您的要求下載生成的模型。如果您想更改輸出文本并修改某些內(nèi)容,您可以隨時(shí)選擇您有權(quán)編輯和測試內(nèi)容的代碼版本。在這里,我正在下載我需要的 .bin 文件,因?yàn)槲覍⑹褂脴漭缮峡焖儆鹈妮敵?a target='_blank' class='arckwlink_none'>信息。
結(jié)論:我們正處于一個(gè)必須轉(zhuǎn)向電動(dòng)汽車的階段,否則我們將無法控制或減少氣候變化。基于無人機(jī)或基于 UGV 的交付是未來。例如,考慮送餐,至少在像 zomato 和 swiggy 這樣的印度公司
2020 財(cái)年,印度每月平均有 1070 萬客戶在該平臺(tái)上訂購食物,平均每月頻率超過三倍。在截至 2020 年 12 月的九個(gè)月中,99.3% 的外賣訂單來自 Zomato 的移動(dòng)應(yīng)用程序。
這些交付是在使用不可再生燃料的車輛上單獨(dú)進(jìn)行的。這使得該過程效率低下。基于無人機(jī)的送餐是最后一英里送餐的最佳替代品,我們的主動(dòng)預(yù)測性維護(hù)設(shè)備 SASAS 將有助于充電站的診斷檢查。當(dāng)未來充滿自動(dòng)送貨車輛時(shí),這將成為新常態(tài)。
接觸式充電始終是最好的充電方式,因?yàn)闆]有無線充電中常見的 40g% 能量損失。將導(dǎo)體嵌入無人機(jī)的腿中有助于我們快速、整齊地為設(shè)備充電。
我想在競賽的線路供電類別下提交我的項(xiàng)目。
參考資料:
- 按部門劃分的排放量
- 黑碳爐灶排放:對 19 種爐灶/燃料組合的現(xiàn)場評估
- A. Kanawaday 和 A. Sane,“使用 IoT 傳感器數(shù)據(jù)對工業(yè)機(jī)器進(jìn)行預(yù)測性維護(hù)的機(jī)器學(xué)習(xí)”,2017 年第 8 屆 IEEE 軟件工程和服務(wù)科學(xué)國際會(huì)議 (ICSESS) ,2017 年,第 87-90 頁,doi: 10.1109/ ICSESS.2017.8342870。
- 多功能汽車警報(bào)系統(tǒng)
- HARDWARIO IoT Kit智能警報(bào)系統(tǒng)
- 如何構(gòu)建靈敏的晨間警報(bào)系統(tǒng)
- 使用Google Assistant的警報(bào)系統(tǒng)
- 不速之客警報(bào)系統(tǒng)
- 自動(dòng)發(fā)燒檢測和警報(bào)系統(tǒng)
- 交貨警報(bào)系統(tǒng)開源分享
- 煙囪粉塵警報(bào)系統(tǒng)開源分享
- 使用Arduino構(gòu)建警報(bào)系統(tǒng)
- 燒傷預(yù)防警報(bào)系統(tǒng)
- 自動(dòng)光檢測和短信警報(bào)系統(tǒng)
- 喚醒警報(bào)系統(tǒng)
- IoT Capstone自動(dòng)警報(bào)/后座設(shè)備中的嬰兒
- 警報(bào)系統(tǒng)開源分享
- 家庭安全警報(bào)系統(tǒng)
- 警報(bào)式保險(xiǎn)絲的簡單介紹 90次閱讀
- 安防智能化包含哪些系統(tǒng) 647次閱讀
- 電子警報(bào)器電路圖分享 1618次閱讀
- 筆記本防盜保護(hù)器電路圖分享 971次閱讀
- 如何使用IC555創(chuàng)建6個(gè)有趣的警報(bào)器和警報(bào)音效發(fā)生器電路 4704次閱讀
- 制冷系統(tǒng)高壓警報(bào)的原因及排除方法 2w次閱讀
- 汽車智能防霧系統(tǒng)的設(shè)計(jì)及應(yīng)用研究 3489次閱讀
- 行李箱智能跟隨系統(tǒng)原理分析 2.9w次閱讀
- 地震警報(bào)器制作詳解 1w次閱讀
- 什么是FIBARO系統(tǒng),在智能家居中有何應(yīng)用特點(diǎn) 4026次閱讀
- 詳解智能血液參數(shù)分析系統(tǒng)設(shè)計(jì) 731次閱讀
- 基于RFID的汽車智能稱重系統(tǒng)自動(dòng)識(shí)別技術(shù) 3257次閱讀
- 智能控制系統(tǒng)的應(yīng)用 6875次閱讀
- cr2016紐扣電池主要技術(shù)參數(shù)及用途 2.4w次閱讀
- 智能配電系統(tǒng)簡介 4202次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DD3118電路圖紙資料
- 0.08 MB | 1次下載 | 免費(fèi)
- 2AD庫封裝庫安裝教程
- 0.49 MB | 1次下載 | 免費(fèi)
- 3PC6206 300mA低功耗低壓差線性穩(wěn)壓器中文資料
- 1.12 MB | 1次下載 | 免費(fèi)
- 4網(wǎng)絡(luò)安全從業(yè)者入門指南
- 2.91 MB | 1次下載 | 免費(fèi)
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下載 | 免費(fèi)
- 6海川SM5701規(guī)格書
- 1.48 MB | 次下載 | 免費(fèi)
- 7H20PR5電磁爐IGBT功率管規(guī)格書
- 1.68 MB | 次下載 | 1 積分
- 8IP防護(hù)等級(jí)說明
- 0.08 MB | 次下載 | 免費(fèi)
本月
- 1貼片三極管上的印字與真實(shí)名稱的對照表詳細(xì)說明
- 0.50 MB | 103次下載 | 1 積分
- 2涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 89次下載 | 1 積分
- 3錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 43次下載 | 1 積分
- 4錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 19次下載 | 1 積分
- 5PCB的EMC設(shè)計(jì)指南
- 2.47 MB | 16次下載 | 1 積分
- 6HC05藍(lán)牙原理圖加PCB
- 15.76 MB | 13次下載 | 1 積分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下載 | 免費(fèi)
- 8蘋果iphone 11電路原理圖
- 4.98 MB | 6次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191390次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65989次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論